一种主被动结合的多自由度康复机器人及其训练方法
本发明涉及康复机器人,具体涉及一种主被动结合的多自由度康复机器人及其训练方法。
背景技术:
1、脑卒中后,由于神经元的损伤,上肢失去大脑高级运动中枢的控制,导致神经肌肉功能障碍。随着病情发展,上肢功能障碍愈发加重,这是一种习得性非使用现象,因此及时康复治疗有利于上肢功能障碍的恢复。脑卒中患者的后续治疗以康复训练治疗为主,80%-90%的患者可以通过康复治疗恢复生活自理能力。在第一、二级康复训练阶段即患者入院后于急诊科、神经内科、神经外科接受的康复治疗,患者伤情较为严重,大多数患者选择遵医嘱在医院进行每日训练;在第三级康复阶段即社区医院或家庭康复训练中,由于专业康复医师的相对缺乏以及连续治疗费用昂贵,大多数患者选择在家中进行自行训练。
2、当前,康复机器人成为手康复方向的研究新热点,康复机器人技术也被广泛应用于康复工程领域中。经过临床实验,以刚性机械臂手康复机器人为代表的传统装置能够精确把握治疗方位、治疗角度等,因此具有较好的治疗效果。但因其机械属性导致易对患者患侧手产生二次伤害。同时由于人手复杂的解剖结构、多样化的运动模式,以及手工作空间狭小等生理因素导致机器人硬件结构布局困难、康复训练效果不佳等问题,许多运动约束和困难的配置集成导致手功能康复机器人距离临床使用还有较多的难题需要解决。
3、与传统装置相比,近年来新兴的气动软体驱动康复。其驱动装置与本体复合一体,气压下可实现连续的大角度变形。名称为“穿戴式手关节屈伸训练方法及终端”,申请号为[cn202210307200.6]的专利申请,公开了一种穿戴式手关节屈伸训练方法及终端,终端包括控制单元、气泵、分指穿戴部、气管、电磁阀以及交互界面,控制单元分别与气泵、电磁阀以及交互界面信号连接;所述交互界面用于根据用户的操作信息对控制单元发出操作指令;所述控制单元用于交互界面的操作指令控制气泵对分指穿戴部的充气和吸气,以及控制电磁阀的开启和关闭;所述气管用于连通气泵和分指穿戴部;所述电磁阀设置在气管上,用于开关气泵和分指穿戴部的连通;方法包括:s1、按压检测气囊,对患者手功能障碍进行评估,以评估结果制定康复训练计划;s2、将分指穿戴部穿戴在手部;s3、选择屈伸训练模式,进行屈伸训练。
4、但是,现有技术存在以下问题:
5、1、现有技术中,大部分软体康复手套还存在所使用的气动软体驱动器需要在较大气压下才能提供足够的驱动力、无法实现手部精细动作的识别与检测等问题。
6、2、现有的手康复训练机器人的研究聚焦于整手的抓握、舒展等动作,而不涉及患者单指活动的训练,这会导致患者只进行单一大脑神经传导回路的训练,难以在康复后生活中凭意识活动单个手指而不对其他部位产生影响。
7、3、现有的康复训练由于训练过程缺乏趣味性,很多患者在进行训练后会逐渐失去兴趣,排斥训练仪器,这不利于后续康复训练的进行。
技术实现思路
1、为了克服上述现有技术的缺点,本发明的目的在于提供一种主被动结合的多自由度康复机器人及其训练方法,通过设计康复手套与虚拟现实游戏相结合的康复机器人,并将主动式和被动式手功能康复训练相结合,激发了患者的训练热情和主动性,具有训练模式多元化,训练设备轻便、舒适的特点。
2、为了实现上述目的,本发明采取的技术方案如下:
3、一种主被动结合的多自由度康复机器人,包括:
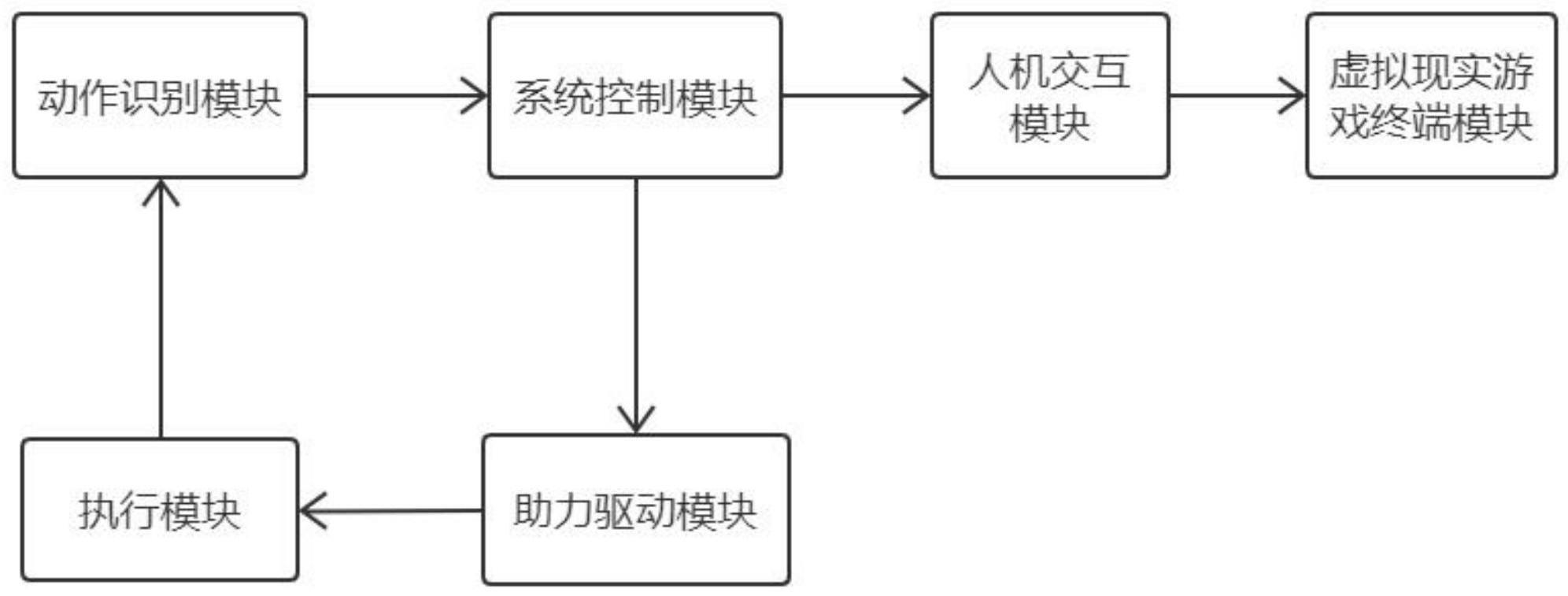
4、动作识别模块:用于检测患者手部舒张或抓握时俯仰角角度变化,完成对角度信号的采集及处理,并将角度信号传递给系统控制模块;
5、系统控制模块:与动作识别模块信号连接,用于识别角度信号,根据角度信号输出控制信号,并将控制信号传递给助力驱动模块和人机交互模块;
6、助力驱动模块:与系统控制模块信号连接,识别系统控制模块发出的控制信号,并根据控制信号驱动执行模块进行康复训练;
7、执行模块:在助力驱动模块的控制下引导患者完成手功能康复训练;
8、人机交互模块:与系统控制模块信号连接,将系统控制模块的控制信号用于计算机系统之间的信息交互,并将控制信号传递给虚拟现实游戏终端模块;
9、虚拟现实游戏终端模块:与人机交互模块信号连接,并根据人机交互模块的控制信号配置多款不同针对性的游戏,辅助完成康复训练。
10、所述动作识别模块包括:
11、掌心陀螺仪传感器:设置于软体手套的掌心处,可根据患者手型的特性制定抓握极限角度;
12、手指陀螺仪传感器:设置于软体手套指尖处,与掌心陀螺仪传感器信号连接,用于识别手指的抓握或伸张角度,判定各手指的pitch是否到达舒张极限,并将角度信号传递给微处理器模块。
13、所述系统控制模块包括:
14、微处理器模块:与手指陀螺仪传感器信号连接,用于识别角度信号,根据角度信号输出控制信号,并将控制信号分别传递给无线通信模块和继电器;
15、无线通信模块:与微处理器模块信号连接,通过无线通信技术将控制信号传递给上位机。
16、所述助力驱动模块包括:
17、继电器:与微处理器模块信号连接,接收微处理器模块的控制信号,并将控制信号传递给电磁阀,控制电磁阀开关;
18、电磁阀:与继电器信号连接,根据继电器发送的控制信号,选择所需的开关;所述电磁阀的出气口与气动回路的进气端相连接;
19、气动回路:根据电磁阀的开关,对软体制动器进行充气或放气;
20、电源:为电磁阀和气动回路供电。
21、所述执行模块包括:
22、气体软管:所述气体软管的进气口与气动回路的出气端相连接,将气体输送至软体制动器;
23、软体制动器:所述软体制动器设置于软体手套的手指处,软体制动器的储气腔与气体软管的出气口相连接,通过充气或放气带动手指的伸张或抓握;
24、软体手套:通过软体制动器带动软体手套伸张或抓握,完成康复训练。
25、所述人机交互模块包括:
26、上位机:与无线通信模块信号连接,接收无线通信模块的控制信号,完成通讯板块的连接以及训练方式、训练难度和训练挡位的设置,并将训练指令传递给vr设备。
27、所述虚拟现实游戏终端模块包括:
28、vr设备:与上位机信号连接,接收上位机的训练指令,通过游戏辅助完成康复训练。
29、一种主被动结合的多自由度康复训练方法,包括主动式训练和被动式训练;
30、所述主动式训练的步骤为:
31、步骤1,设备初始化与连接:通过蓝牙将动作识别模块、系统控制模块、助力驱动模块、人机交互模块、虚拟现实游戏终端模块依次信号连接;
32、步骤2,选择主动训练模式及训练参数:通过上位机选择训练模式为主动式训练,设置训练参数并选择康复游戏;
33、步骤3,佩戴软体手套;
34、步骤4,设置初始参数:手部舒张,通过上位机进行手部动作参数的初始化;
35、步骤5,设置手指个性化阈值:初始化掌心陀螺仪传感器和手指陀螺仪传感器;气动回路对软体制动器充气,强制伸直手指,获得各个手指的伸阈值;手指依次弯曲,测量弯曲的pitch角,获得各个手指的握阈值;根据获得的伸阈值和握阈值设置各个手指的个性化阈值;
36、步骤6,进行手指主动康复训练;
37、所述被动式训练的步骤为:
38、步骤1,设备初始化与连接:通过蓝牙将系统控制模块、助力驱动模块、人机交互模块依次信号连接;
39、步骤2,选择被动训练模式及训练参数:通过上位机选择训练模式为被动式训练并设置训练参数;
40、步骤3,佩戴软体手套;
41、步骤4,进行手指被动康复训练。
42、所述主动式训练中步骤6进行手指主动康复训练的具体步骤为:
43、步骤6.1,启动vr设备中的康复游戏,
44、步骤6.2,根据游戏内容手指抓握或伸张,手指陀螺仪传感器获取角度数据,并将角度数据传递给微处理器模块;
45、步骤6.3,微处理器模块利用手指角度数据与个性化阈值做差,判断是否达到抓握或伸张条件,若是,则微处理器模块输出抓握或伸张信号,若否,则返回步骤6.2;
46、步骤6.4,继电器接收微处理器模块发送的抓握或伸张信号,并将信号发送至电磁阀,控制电磁阀充气或放气开关;
47、步骤6.5,根据电磁阀开启的充气或放气开关通过气体软管对软体制动器进行充气或放气,进而通过软体手套控制手指的抓握或伸张;
48、步骤6.6,微处理器模块将手指的抓握或伸张信号传递给无线通信模块,无线通信模块将信号通过上位机传递至vr设备,重复步骤6.2-步骤6.6,进行周期性训练。
49、所述被动式训练中步骤4进行手指被动康复训练的具体步骤为:
50、步骤4.1,上位机将步骤2设置的训练参数通过无线通信模块传递给控制微处理器模块;
51、步骤4.2,微处理器模块根据训练参数生成手指抓握或伸张信;
52、步骤4.3,继电器接收微处理器模块发送的抓握或伸张信号,并将信号发送至电磁阀,控制电磁阀充气或放气开关;
53、步骤4.4,根据电磁阀开启的充气或放气开关通过气体软管对软体制动器进行充气或放气,进而通过软体手套控制手指的抓握或伸张,重复步骤4.1-步骤4.4,进行周期性训练。
54、相对于现有技术,本发明的有益效果在于:
55、1、本发明设计了主动式康复训练,利用陀螺仪传感器对患者屈指时产生的微小角度变化判断患者的屈指意识,进而产生正反馈的带动治疗效果,与现有技术相比,能够激发患者主观运动意识,使得患者的运动意识与运动行为相互结合,利于患者对自身手指伸屈控制功能的重建,对运动康复治疗有着强化和促进作用。
56、2、本发明设计了个性化训练极限阈值,通过测定不同患者五指运动的极限阈值,并以此为基准设计各个手指的伸阈值,与现有技术相比,避免了个体差异带来的影响。
57、3、本发明将手功能康复治疗与vr技术相结合,让患者在治疗过程中体会游戏的乐趣,通过游戏的指令活动手指,与现有技术相比,更加具有练习指向性与目的性,从而实现更好的治疗效果。
58、4、本发明将主动式训练和被动式训练相结合,患者可以根据实际情况自行选择训练模式,与现有技术相比,本发明的训练模式更加多元化。
59、5、本发明将执行模块和助力驱动模块分开设计,使软体手套和助力驱动装置分离,与现有技术相比,避免患者承受过多的重量,解决了安全性和舒适性的问题。
60、6、本发明的执行模块、人机交互模块、虚拟现实游戏终端模块之间均通过信号连接,将上位机和软体手套分开设置,与现有技术相比,具有接线简单,提高软体手套灵活度,减小体积,使用环境广泛的特点。
61、综上所述,本发明将康复训练与虚拟现实游戏相结合,同时设计了主动式和被动式两种训练模式,根据不同患者的实际情况设计各个手指的伸阈值,与现有技术相比,本发明激发了患者的训练热情和主动性,增加了康复训练的趣味性,具有训练模式多元化,训练设备轻便、舒适的特点。
- 还没有人留言评论。精彩留言会获得点赞!