一种用于智能假肢髋关节的双动力输出机构
本发明涉及医疗康复器材领域,尤其涉及一种用于智能假肢髋关节的双动力输出机构。
背景技术:
1、受疾病、交通事故以及小概率发生的战争影响,截肢是现有技术条件下保护人类生命安全的极端手段。为帮助截肢者重建健康心理,重回正常的社会活动,佩戴假肢是目前能够辅助患者恢复行走能力的唯一方法。髋离断假肢作为下肢假肢中控制难度最大的假肢类型,传统的髋离断假肢因没有动力补充,在使用的过程中需要依靠惯性将其甩出,这种行走方式,不仅会消耗大量的体能,且长期畸形的步态也会容易引起其他身体疾病。智能假肢不仅能够弥补患者在行走过程中的能量消耗而且智能化的动力辅助也会使假肢的控制更加容易以缩短患者适应假肢的时间,帮助他们更快更好地回归生活。但髋关节的动力上限仍然是限制智能假肢髋关节发展的关键,增加髋关节的动力矩水平对提升智能假肢更强的通过性具有重要意义。
2、因此,本领域的技术人员致力于开发一种用于智能假肢髋关节的双动力输出机构,通过叠加电机动力以达到为髋关节提供更强的动力输出。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题包括:1)动力输出不足与电机庞大以及减速比过高的问题,以及高功率电机无论是高电压还是高电流都存在安全性的问题。2)假肢重心分布问题。3)电机失控后的安全保障问题。4)助伸结构稳定问题。
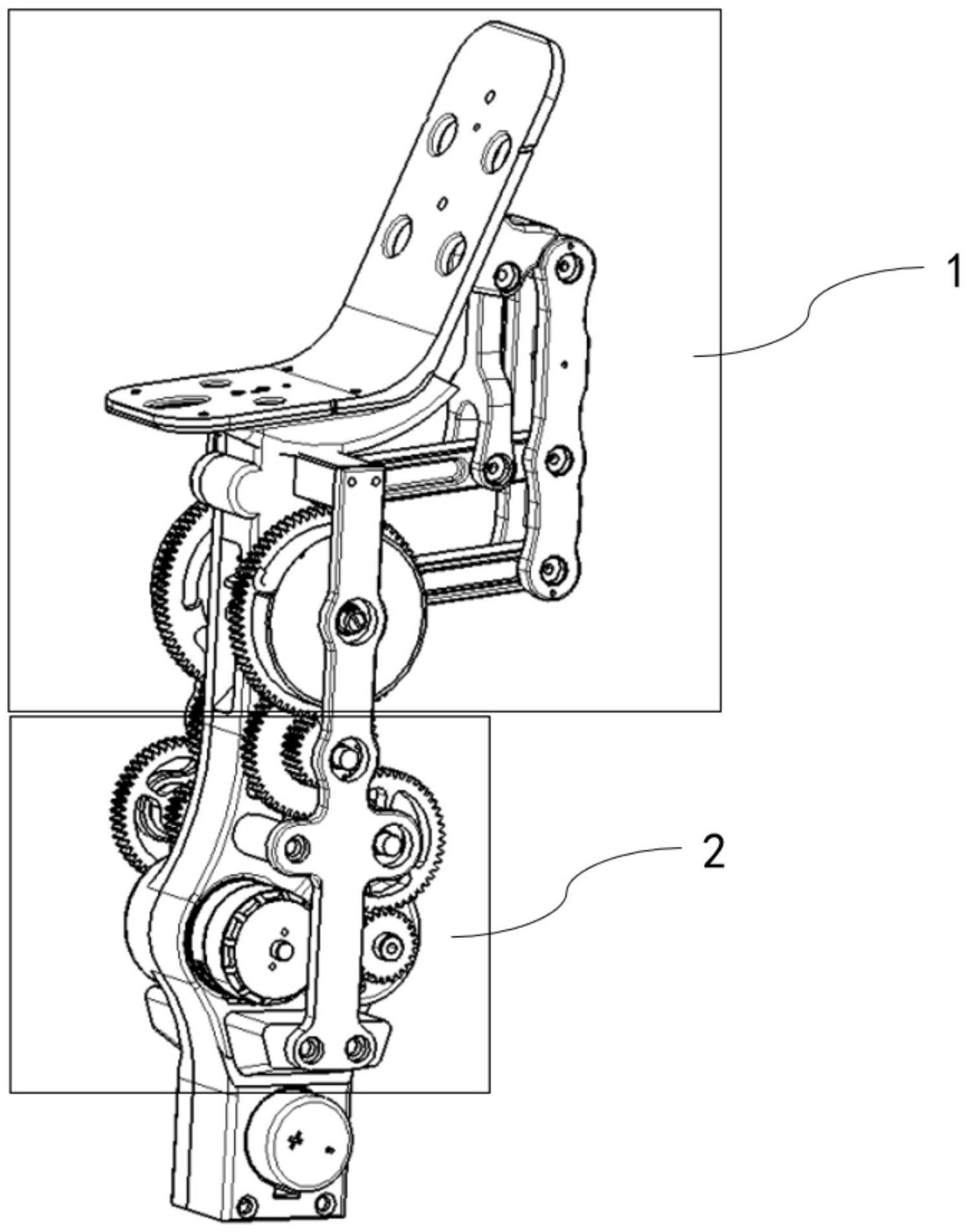
2、为实现上述目的,本发明提供了一种用于智能假肢髋关节的双动力输出机构,包括假肢运动系统和动力传输系统;
3、其中,所述假肢运动系统包括接受腔标准l形板、假肢接头、双排连接杆、y形连接杆、辅助连接杆、动力异形杆和假肢腿骨;
4、所述动力传输系统包括柔性传动轮、端盖、二级减速齿轮组、一级减速齿轮组、第二动力电机、主动齿轮、第二支撑柱、第一动力电机、第三支撑柱、电池、弹簧、铰链球、加强筋、调紧螺丝、导向杆和异形动力轴。
5、进一步地,所述假肢腿骨设置有膝关节连接槽。
6、进一步地,所述柔性传动轮包括弹性元件、调力四爪盘和基座齿轮。
7、进一步地,所述动力异形杆设置有顶丝孔、铰链球槽和键槽。
8、进一步地,所述异形动力轴设置有键槽、锁紧外螺纹和矩形开口槽。
9、进一步地,所述第一动力电机和所述第二动力电机对称分布在假肢腿骨两侧;所述第一动力电机和所述第二动力电机通过设置在输出轴上的所述主动齿轮,并沿所述一级减速齿轮组和所述二级减速齿轮组将动力传送至所述柔性传动轮,所述柔性传动轮通过设置在内部的所述动力卷簧将扭矩传递到髋关节,所述动力轴带动髋关节结构完成屈髋动作。
10、进一步地,所述第一动力电机和所述第二动力电机的型号规格一致且关于假肢腿骨中心线对称分布;分布在假肢腿骨两侧的所述一级减速齿轮组采用相同材料及结构设计,并且关于假肢腿骨中心线对称;分布在假肢腿骨两侧的所述二级减速齿轮组采用相同材料及结构设计,并且关于假肢腿骨中心线对称。
11、进一步地,所述弹性元件为动力卷簧。
12、进一步地,所述铰链球与所述铰链球槽配合后裸露部分不小于所述铰链球的表面积的1/2,且俯视条件下远离所述异形动力轴一侧铰链球槽边缘不能超出所述铰链球的直径。
13、进一步地,所述导向杆内嵌于所述弹簧中,且与所述铰链球接触部分为弧形。
14、与现有技术方案相比,本发明的有益技术效果至少包括:
15、1)本发明通过叠加电机动力,提升了关节扭矩,并且使用低功率电机在假肢动力系统中安全性更高,且成本低。
16、2)本发明设置空间对称结构,均衡假肢整体的质量分布,从而避免假肢腿骨质量分布不均造成的运动失衡。
17、3)本发明增加柔性传动结构,可以避免动力电机在调整关节刚度过程中存在相反运动而造成堵转或机构损坏。
18、4)本发明通过增大助伸结构的接触行程以及增大助伸结构的接触面积,以保证助伸力持续且稳定,提高了系统稳定性。
19、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:
1.一种用于智能假肢髋关节的双动力输出机构,其特征在于,包括假肢运动系统和动力传输系统;
2.如权利要求1所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述假肢腿骨设置有膝关节连接槽。
3.如权利要求1所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述柔性传动轮包括弹性元件、调力四爪盘和基座齿轮。
4.如权利要求1所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述动力异形杆设置有顶丝孔、铰链球槽和键槽。
5.如权利要求1所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述异形动力轴设置有键槽、锁紧外螺纹和矩形开口槽。
6.如权利要求3所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述第一动力电机和所述第二动力电机对称分布在假肢腿骨两侧;所述第一动力电机和所述第二动力电机通过设置在输出轴上的所述主动齿轮,并沿所述一级减速齿轮组和所述二级减速齿轮组将动力传送至所述柔性传动轮,所述柔性传动轮通过设置在内部的所述动力卷簧将扭矩传递到髋关节,所述动力轴带动髋关节结构完成屈髋动作。
7.如权利要求1所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述第一动力电机和所述第二动力电机的型号规格一致且关于假肢腿骨中心线对称分布;分布在假肢腿骨两侧的所述一级减速齿轮组采用相同材料及结构设计,并且关于假肢腿骨中心线对称;分布在假肢腿骨两侧的所述二级减速齿轮组采用相同材料及结构设计,并且关于假肢腿骨中心线对称。
8.如权利要求3所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述弹性元件为动力卷簧。
9.如权利要求4所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述铰链球与所述铰链球槽配合后裸露部分不小于所述铰链球的表面积的1/2,且俯视条件下远离所述异形动力轴一侧铰链球槽边缘不能超出所述铰链球的直径。
10.如权利要求4所述的用于智能假肢髋关节的双动力输出机构,其特征在于,所述导向杆内嵌于所述弹簧中,且与所述铰链球接触部分为弧形。
技术总结
本发明公开了一种用于智能假肢髋关节的双动力输出机构,涉及医疗康复器材领域。该机构包括假肢运动系统和动力传输系统;其中,假肢运动系统包括接受腔标准L形板、假肢接头、双排连接杆、Y形连接杆、辅助连接杆、动力异形杆和假肢腿骨;述动力传输系统包括柔性传动轮、端盖、二级减速齿轮组、一级减速齿轮组、第二动力电机、主动齿轮、第二支撑柱、第一动力电机、第三支撑柱、电池、弹簧、铰链球、加强筋、调紧螺丝、导向杆和异形动力轴。本发明通过叠加电机动力,提升了关节扭矩,还通过设置空间对称结构,均衡假肢整体的质量分布,增加了柔性传动结构,可避免动力电机堵转,并提高了系统稳定性。
技术研发人员:喻洪流,罗胜利,朱禾祥,疏小龙,杜佳昊,孟巧玲
受保护的技术使用者:上海理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!