一种极坐标力臂杆及其安装方法与流程
本发明涉及假肢实验工装的,具体的,涉及一种极坐标力臂杆及其安装方法。
背景技术:
1、假肢 下假肢加载试验标准gb/t18375.1∽7《假肢 下肢假肢的结构检验》,载荷作用点是直角坐标形式,在加载试验时采用直角坐标机构或专用夹具实现载荷作用点的位置安装。发明人发现目前技术中采用直角坐标机构结构复杂,采用专用夹具无通用性。
技术实现思路
1、本发明提出一种极坐标力臂杆及其安装方法,极坐标力臂杆将标准中载荷作用点的直角坐标形式,转化为极坐标形式,简便通用,快速实现载荷作用点的位置安装。
2、为此,本申请第一方面提供了一种极坐标力臂杆,采用的技术方案如下:包括安装在假肢或者连接杆上的力臂杆本体,所述力臂杆本体上设有直尺,所述直尺的刻度原点处于假肢或连接杆的中心线上,所述力臂杆远离刻度原点的远端滑动设置有调节施力组件,所述力臂杆本体的原点处设有角度调节组件。
3、通过采用上述技术方案:通过设置调节施力组件和角度调节组件,可根据变换关系,方便调节载荷点在极坐标中的位置。
4、可选的,所述力臂杆本体上设有连接部,所述连接部设有连接圆孔,所述力臂杆本体通过连接圆孔套设在假肢或者连接杆上并通过紧固组件进行固定。
5、通过采用上述技术方案:上述方式连接结构简单,便于进行固定操作,提高了实验的效率。
6、可选的,所述连接部具有一定弹性且具有开口,所述紧固组件设置在开口处。
7、通过采用上述技术方案:便于安装力臂杆本体,安装后通过紧固组件也能够实现快速的定位,提高了安装和实验效率。
8、可选的,所述紧固组件包括开设在连接部开口处的通孔,所述通过内穿设有紧固螺栓。
9、通过采用上述技术方案:在套设完毕力臂杆本体后,通过逐步的锁紧紧固螺栓实现力臂杆本体的固定。
10、可选的,所述调节施力组件包括滑动设置在力臂杆本体上的支座、用于固定支座的固定组件,所述支座上设有施力球铰。
11、通过采用上述技术方案:支座滑动设置在力臂杆本体上,便于调节其位置,位置调整到位后,通过固定组件可以方便快速的将其固定,同时设置的施力铰球便于进行施加外力。
12、可选的,所述力臂杆本体上设有导向槽,所述支座上设有导向块,所述导向块处于导向槽内部,所述固定组件包括与导向块连接的螺杆,所述螺杆延伸出导向槽的部分设有压板,所述螺杆上螺纹连连接有螺母,所述支座上还设有游标尺。
13、通过采用上述技术方案:便于支座在力臂杆本体上进行位置调节与固定。
14、可选的,所述角度调节组件包括通过连接件固定套设在假肢或者连接杆上的角度圆盘以及设置在力臂杆本体上的角度游标尺。
15、通过采用上述技术方案:便于力臂杆本体的角度调节,同时位置调节的精度更高。
16、可选的,所述力臂杆本体和角度圆盘之间通过分时阻尼连接件可转动连接。
17、通过采用上述技术方案:在进行力臂杆本体的角度调节时,阻尼不起作用,当位置调整到位后,具有一定的阻尼作用对力臂杆本体进行预先定位,防止其偏移,之后通过紧固组件进行固定。
18、可选的,所述分时阻尼连接件包括设置在力臂杆本体下侧的接触块和设置在角度圆盘上的滑槽,所述接触块置于滑槽内部,所述滑槽内部设有分时接触阻尼件;
19、所述分时接触阻尼件包括穿设在滑槽侧壁的弹性件,安装在弹性件内侧的阻尼块和与弹性件外端连接的分时连接件。
20、本申请的第二方面,提供了一种极坐标力臂杆的安装方法,包括以下步骤:
21、s1、根据假肢试验要求,已知载荷作用点直角坐标(x,y),转换成极坐标ρ(θ),对应关系:ρ=(x2+y2)1/2,θ=arctg(y/x);
22、s2、将支座调整到长度ρ处,并通过固定组件与力臂杆本体连接;
23、s3、将角度圆盘紧固到假肢或连接杆上,转动力臂杆本体,带动角度游标尺,转动到角度θ处,通过紧固组件将力臂杆本体与假肢或连接杆紧固。
24、本申请的工作原理及有益效果为:
25、1、通过设置调节施力组件和角度调节组件,可根据变换关系,方便调节载荷点在极坐标中的位置。
26、2、便于安装力臂杆本体,安装后通过紧固组件也能够实现快速的定位,提高了安装和实验效率。
27、3、设置的分时阻尼连接件在进行力臂杆本体的角度调节时,阻尼不起作用,当位置调整到位后,具有一定的阻尼作用对力臂杆本体进行预先定位,防止其偏移,之后通过紧固组件进行固定。
技术特征:
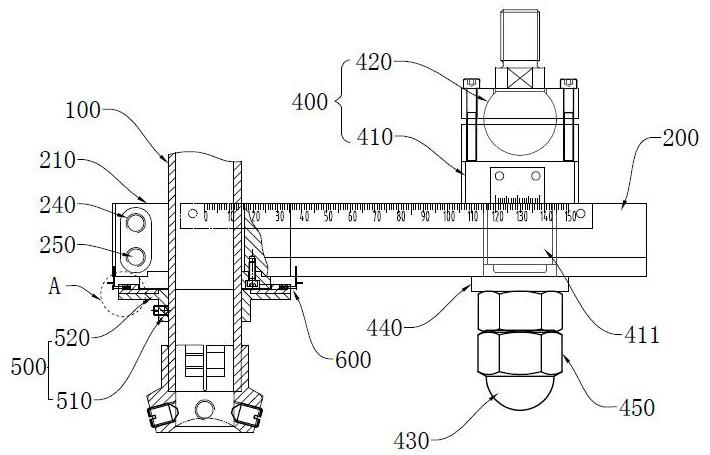
1.一种极坐标力臂杆,其特征在于,包括安装在假肢或者连接杆(100)上的力臂杆本体(200),所述力臂杆本体(200)上设有直尺(300),所述直尺(300)的刻度原点处于假肢或连接杆(100)的中心线上,所述力臂杆远离刻度原点的远端滑动设置有调节施力组件(400),所述力臂杆本体(200)的原点处设有角度调节组件(500)。
2.根据权利要求1所述的一种极坐标力臂杆,其特征在于,所述力臂杆本体(200)上设有连接部(210),所述连接部(210)设有连接圆孔(220),所述力臂杆本体(200)通过连接圆孔(220)套设在假肢或者连接杆(100)上并通过紧固组件进行固定。
3.根据权利要求2所述的一种极坐标力臂杆,其特征在于,所述连接部(210)具有一定弹性且具有开口(230),所述紧固组件设置在开口(230)处。
4.根据权利要求3所述的一种极坐标力臂杆,其特征在于,所述紧固组件包括开设在连接部(210)开口(230)处的通孔(240),所述通过内穿设有紧固螺栓(250)。
5.根据权利要求1所述的一种极坐标力臂杆,其特征在于,所述调节施力组件(400)包括滑动设置在力臂杆本体(200)上的支座(410)、用于固定支座(410)的固定组件,所述支座(410)上设有施力球铰(420)。
6.根据权利要求5所述的一种极坐标力臂杆,其特征在于,所述力臂杆本体(200)上设有导向槽(260),所述支座(410)上设有导向块(411),所述导向块(411)处于导向槽(260)内部,所述固定组件包括与导向块(411)连接的螺杆(430),所述螺杆(430)延伸出导向槽(260)的部分设有压板(440),所述螺杆(430)上螺纹连连接有螺母(450),所述支座(410)上还设有游标尺(270)。
7.根据权利要求1-6任意一项所述的一种极坐标力臂杆,其特征在于,所述角度调节组件(500)包括通过连接件(510)固定套设在假肢或者连接杆(100)上的角度圆盘(520)以及设置在力臂杆本体(200)上的角度游标尺(280)。
8.根据权利要求7所述的一种极坐标力臂杆,其特征在于,所述力臂杆本体(200)和角度圆盘(520)之间通过分时阻尼连接件(600)可转动连接。
9.根据权利要求8所述的一种极坐标力臂杆,其特征在于,所述分时阻尼连接件(600)包括设置在力臂杆本体(200)下侧的接触块(610)和设置在角度圆盘(520)上的滑槽(620),所述接触块(610)置于滑槽(620)内部,所述滑槽(620)内部设有分时接触阻尼件;
10.一种极坐标力臂杆的安装方法,其特征在于,包括以下步骤:
技术总结
本发明涉及假肢实验工装的技术领域,提出了一种极坐标力臂杆及其安装方法,包括包括安装在假肢或者连接杆上的力臂杆本体,所述力臂杆本体上设有直尺,所述直尺的刻度原点处于假肢或连接杆的中心线上,所述力臂杆远离刻度原点的远端滑动设置有调节施力组件,所述力臂杆本体的原点处设有角度调节组件。本发明的有益效果为:通过设置调节施力组件和角度调节组件,可根据变换关系,方便调节载荷点在极坐标中的位置,提高了实验效率。
技术研发人员:陈楠,米晋,王长喜,姜昆,刘炳成,许长顺,王旭东
受保护的技术使用者:济南东测试验机技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!