导管端连接器、导管装置、连接装置及内窥镜系统的制作方法
本发明涉及内窥镜,尤其涉及一种导管端连接器、导管装置、连接装置及内窥镜系统。
背景技术:
1、内窥镜手术机器人为介入式医疗设备,气管镜机器人为内窥镜机器人的一种,包括导管、具有操作头和推拉丝的手术工具以及手柄操控部分,导管用于介入到人体内,并利用人体的自然腔道建立工作通道,手术工具穿过工作通道,两端伸出导管,位于体内的一端用于定位目标区域,进行医疗操作(比如活检取样),位于体外的一端连接手柄操控部分,通过对推拉丝进行的内推和外拉的操作来控制操作头的位置,以便于准确定位和实行医疗操作。
2、导管和手柄之间连接的稳定性和可靠性影响到导管和推拉丝的控制精度,本发明旨在提供一种能够精准控制导管和推拉丝的方案,为此提出一种导管端连接器,能够作为导管的连接结构稳定、可靠地连接到手柄上,基于两者连接的高稳定、可靠性达到精准控制导管和推拉丝的效果,并基于该导管端连接器进一步提出一种导管装置、连接装置及内窥镜系统。
技术实现思路
1、为了提高导管和推拉丝的控制精度,本发明提供了一种导管端连接器、导管装置、连接装置及内窥镜系统。本发明通过下述方案实现:
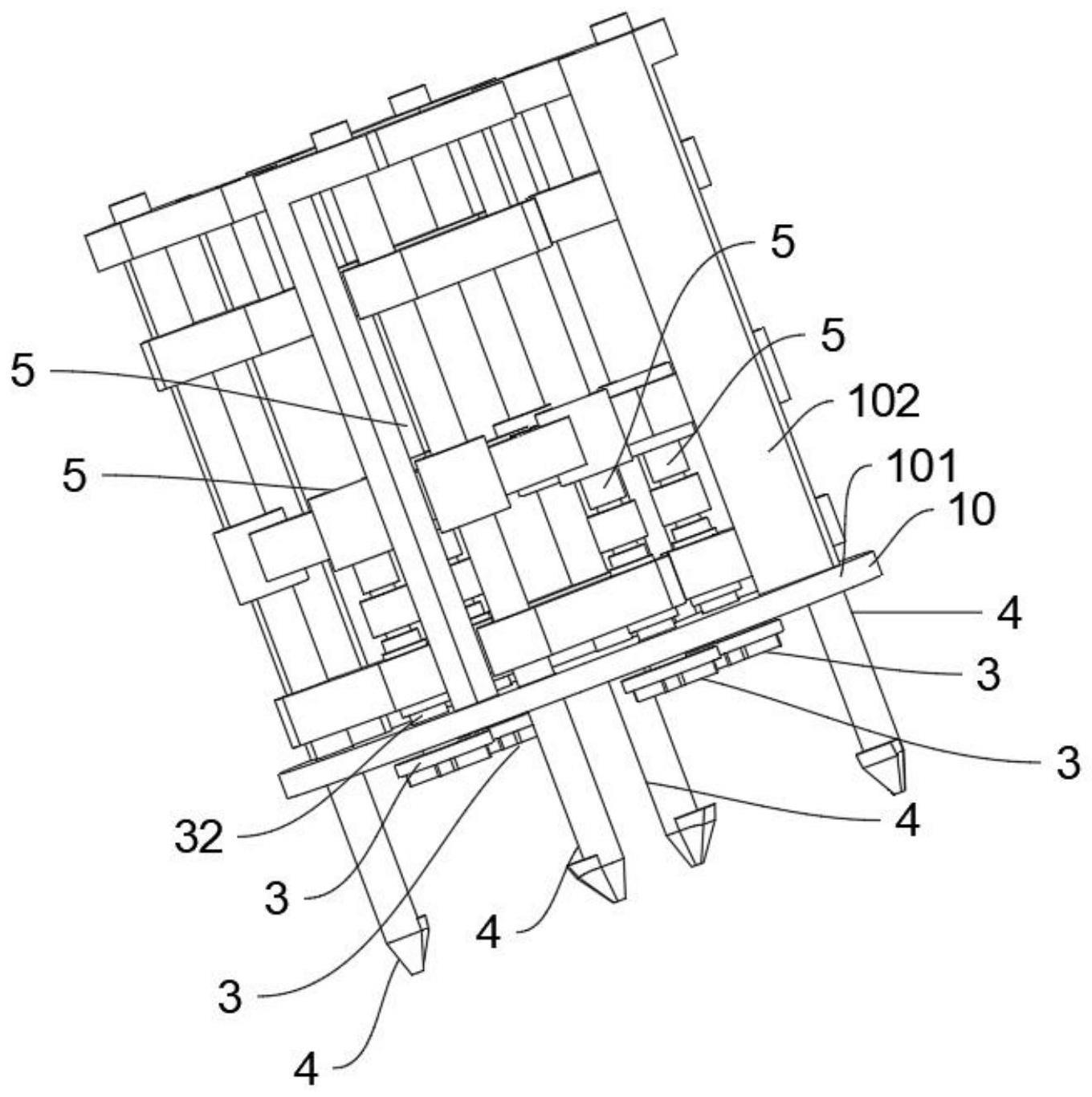
2、一种导管端连接器,包括导管端连接架和第一耦合单元;所述导管端连接架包括导管端板和导管端支架,所述导管端支架自所述导管端板处朝向第一方向的正向延伸;
3、所述第一耦合单元包括在所述第一方向上相对静止的导管端推力耦合部、导管端拉力耦合部及直线传动机构;所述导管端推力耦合部的输入端伸出所述导管端板,并用于接收朝向所述第一方向的正向的作用力以及在所述第一方向上自转的作用力,所述导管端推力耦合部的输出端与所述直线传动机构的输入端固定连接;所述直线传动机构用于输出线性往复运动;所述导管端拉力耦合部的输入端伸出所述导管端板,并用于接收朝向所述第一方向的负向的作用力。
4、可选的,所述导管端支架包括成角度设置的第一连接部和第二连接部,所述第一连接部的两端分别连接所述导管端板和所述第二连接部;所述第二连接部分别连接所述导管端拉力耦合部的远离所述导管端板的一端和所述导管端推力耦合部的远离所述导管端板的一端;
5、所述导管端支架和所述第一耦合单元一一对应设置。
6、可选的,所述导管端推力耦合部包括导管端推力耦合盘和导管端推力连接体,所述导管端推力耦合盘位于所述导管端板的背离所述导管端支架的一侧,并与所述导管端板相互限位,所述导管端推力连接体的两端分别也所述导管端推力耦合盘和所述直线传动机构的输入端固定连接。
7、可选的,所述导管端推力耦合盘包括导管端推力盘体和设于所述导管端推力盘体上的导管端推力定位部,所述导管端推力盘体和所述导管端板抵靠连接,所述导管端推力盘体上背离所述导管端板的一面内凹或凸起形成所述导管端推力定位部,所述导管端推力定位部的轮廓采用不规则形状;
8、所述导管端推力连接体通过联轴器连接所述直线传动机构的输入端。
9、可选的,直线传动机构包括丝杆和滑块,所述丝杆的两端分别连接所述导管端推力耦合部和所述导管端支架,所述滑块和所述丝杆螺纹连接,所述滑块上设有推拉丝固定体,所述滑块和所述导管端拉力耦合部滑动连接。
10、可选的,所述导管端拉力耦合部包括拉力触发杆,所述拉力触发杆和所述导管端支架固定连接,所述拉力触发杆伸出所述导管端板的一端沿径向向外凸出形成导管端拉力限位部,所述导管端拉力限位部用于接收所述第一方向的负向的作用力。
11、可选的,所述第一耦合单元还包括第一连接件和第二连接件,所述第一连接件与所述导管端推力耦合部转动连接,并与所述导管端拉力耦合部固定连接,所述第二连接件与所述直线传动机构转动连接,并与所述导管端拉力耦合部固定连接;所述第一连接件和所述第二连接件位于所述直线传动机构输出行程的两侧。
12、可选的,所述导管端连接器设置有四个所述第一耦合单元,每个所述第一耦合单元对应一个所述导管端支架,各所述导管端支架沿着所述导管端板的周向均布;
13、所述导管端连接器还包括导管端外壳,所述导管端连接架固定在所述导管端外壳内。
14、一种导管装置,包括导管、推拉丝、操作头以及上述任一项所述的导管端连接器,所述导管和所述导管端连接架固定连接,所述推拉丝穿设所述导管,且所述推拉丝的两端分别连接所述操作头和所述直线传动机构的输出端。
15、一种连接装置,包括手柄端连接器和上述任一项所述的导管端连接器,所述手柄端连接器和所述导管端连接器可拆卸连接,所述手柄端连接器用于使所述导管端推力耦合部的输入端产生朝向所述第一方向的正向的作用力以及在所述第一方向上自转的作用力,所述手柄端连接器还用于使所述导管端拉力耦合部的输入端产生朝向所述第一方向的负向的作用力。
16、一种内窥镜系统,包括导管、推拉丝、操作头、上述任一项所述的导管端连接器、手柄端连接器以及手柄;
17、所述导管和所述导管端连接器固定连接,所述推拉丝穿设所述导管,且所述推拉丝的两端分别连接所述操作头和所述直线传动机构的输出端;所述导管端连接器通过所述手柄端连接器连接所述手柄;
18、其中,所述导管端连接器和所述手柄端连接器连接后,所述手柄端连接器通过驱动所述导管端推力耦合部旋转来控制所述直线传动机构输出线性往复运动。
19、本发明的有益效果是:
20、采用导管端连接器连接手柄时,利用手柄(间接地)向导管端推力耦合部、导管端拉力耦合部加载相应的作用力后,导管端连接器和手柄在第一方向上稳定可靠地连接在一起,即通过导管端推力耦合部和手柄来约束两者在第一方向上相互靠近的位移自由度,通过导管端拉力耦合部和手柄来约束两者在第一方向上相互远离的位移自由度,这两个自由度都被约束了之后,导管端连接器和手柄之间的正压力产生静摩擦力,防止了两者相对转动,即还同时约束了两者在第一方向相对转动的旋转自由度,从而两者可靠地连接起来,通过确保两者连接的稳定性和可靠性实现对导管和推拉丝的精准控制。
21、导管端连接器和手柄端连接器连接后,通过导管端推力耦合部和手柄端推力耦合部来约束导管端连接器和手柄端连接器在第一方向上相互靠近的位移自由度,通过导管端拉力耦合部和手柄端拉力耦合部约束导管端连接器和手柄端连接器在第一方向上相互远离的位移自由度,这两个自由度都被约束了之后,导管端连接器和手柄端连接器便可靠地连接起来,实现了全耦合的效果,然后利用驱动部驱动直线传动机构输出线性运动,便可实现对连接在直线传动机构输出端的推拉丝的内推和外拉的操作。
技术特征:
1.一种导管端连接器,其特征在于,包括导管端连接架和第一耦合单元;所述导管端连接架包括导管端板和导管端支架,所述导管端支架自所述导管端板处朝向第一方向的正向延伸;
2.如权利要求1所述的导管端连接器,其特征在于,所述导管端支架包括成角度设置的第一连接部和第二连接部,所述第一连接部的两端分别连接所述导管端板和所述第二连接部;所述第二连接部分别连接所述导管端拉力耦合部的远离所述导管端板的一端和所述导管端推力耦合部的远离所述导管端板的一端;
3.如权利要求1所述的导管端连接器,其特征在于,所述导管端推力耦合部包括导管端推力耦合盘和导管端推力连接体,所述导管端推力耦合盘位于所述导管端板的背离所述导管端支架的一侧,并与所述导管端板相互限位,所述导管端推力连接体的两端分别也所述导管端推力耦合盘和所述直线传动机构的输入端固定连接。
4.如权利要求3所述的导管端连接器,其特征在于:
5.如权利要求1所述的导管端连接器,其特征在于,直线传动机构包括丝杆和滑块,所述丝杆的两端分别连接所述导管端推力耦合部和所述导管端支架,所述滑块和所述丝杆螺纹连接,所述滑块上设有推拉丝固定体,所述滑块和所述导管端拉力耦合部滑动连接。
6.如权利要求1所述的导管端连接器,其特征在于,所述导管端拉力耦合部包括拉力触发杆,所述拉力触发杆和所述导管端支架固定连接,所述拉力触发杆伸出所述导管端板的一端沿径向向外凸出形成导管端拉力限位部,所述导管端拉力限位部用于接收所述第一方向的负向的作用力。
7.如权利要求1-6任一项所述的导管端连接器,其特征在于,所述第一耦合单元还包括第一连接件和第二连接件,所述第一连接件与所述导管端推力耦合部转动连接,并与所述导管端拉力耦合部固定连接,所述第二连接件与所述直线传动机构转动连接,并与所述导管端拉力耦合部固定连接;所述第一连接件和所述第二连接件位于所述直线传动机构输出行程的两侧。
8.如权利要求1-6任一项所述的导管端连接器,其特征在于,
9.一种导管装置,其特征在于,包括导管、推拉丝、操作头以及如权利要求1-8任一项所述的导管端连接器,所述导管和所述导管端连接架固定连接,所述推拉丝穿设所述导管,且所述推拉丝的两端分别连接所述操作头和所述直线传动机构的输出端。
10.一种连接装置,其特征在于,包括手柄端连接器和如权利要求1-8任一项所述的导管端连接器,所述手柄端连接器和所述导管端连接器可拆卸连接,所述手柄端连接器用于使所述导管端推力耦合部的输入端产生朝向所述第一方向的正向的作用力以及在所述第一方向上自转的作用力,所述手柄端连接器还用于使所述导管端拉力耦合部的输入端产生朝向所述第一方向的负向的作用力。
11.一种内窥镜系统,其特征在于,包括导管、推拉丝、操作头、如权利要求1-8任一项所述的导管端连接器、手柄端连接器以及手柄;
技术总结
本发明涉及一种导管端连接器、导管装置、连接装置及内窥镜系统,包括导管端连接架和第一耦合单元;导管端连接架包括导管端板和导管端支架,导管端支架自导管端板处朝向第一方向的正向延伸;第一耦合单元包括在第一方向上相对静止的导管端推力耦合部、导管端拉力耦合部及直线传动机构;导管端推力耦合部的输入端伸出导管端板,并用于接收朝向第一方向的正向的作用力以及在第一方向上自转的作用力,导管端推力耦合部的输出端与直线传动机构的输入端固定连接;直线传动机构用于输出线性往复运动;导管端拉力耦合部的输入端伸出导管端板,并用于接收朝向第一方向的负向的作用力。导管端连接器能够和手柄端连接器搭配使用,实现精准导管和推拉丝的效果。
技术研发人员:吴昊晟,高杨,单晓政
受保护的技术使用者:常州朗合医疗器械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!