超声探头的控制方法、装置、电子设备及存储介质与流程
本公开涉及医疗健康,尤其涉及一种超声探头的控制方法、装置、电子设备及存储介质。
背景技术:
1、超声检测是利用超声波的物理特性和人体组织声学参数进行成像,是用于解刨学,病理生理学及临床医学等学科的医学影像检测技术,为了满足超声检测中的不同检测模式的检测需求,需要对超声探头进行状态切换,例如,当由超声检测中的打图模式(打图模式是指,控制超声探头贴合人体皮肤,以动态寻找人体器官的切面图)进入血流检测模式(血流检测模式是指,在超声检测过程中,把获得的血流信号经彩色编码后实时地叠加在二维图像上,以形成彩色多普勒超声血流图像,以对血流进行检测)时,需要控制超声探头切换至静止状态,否则,超声探头的震动会导致血流产生噪声,进而对血流的检测产生影响。
2、相关技术中,通常由医生手持超声探头联合当前的检测模式,控制超声探头进行运动状态切换。
3、这种方式下,无法满足超声检测过程中的远程控制需求。
技术实现思路
1、本公开旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本公开提出一种超声探头的控制方法、装置、电子设备、存储介质以及计算机程序产品。
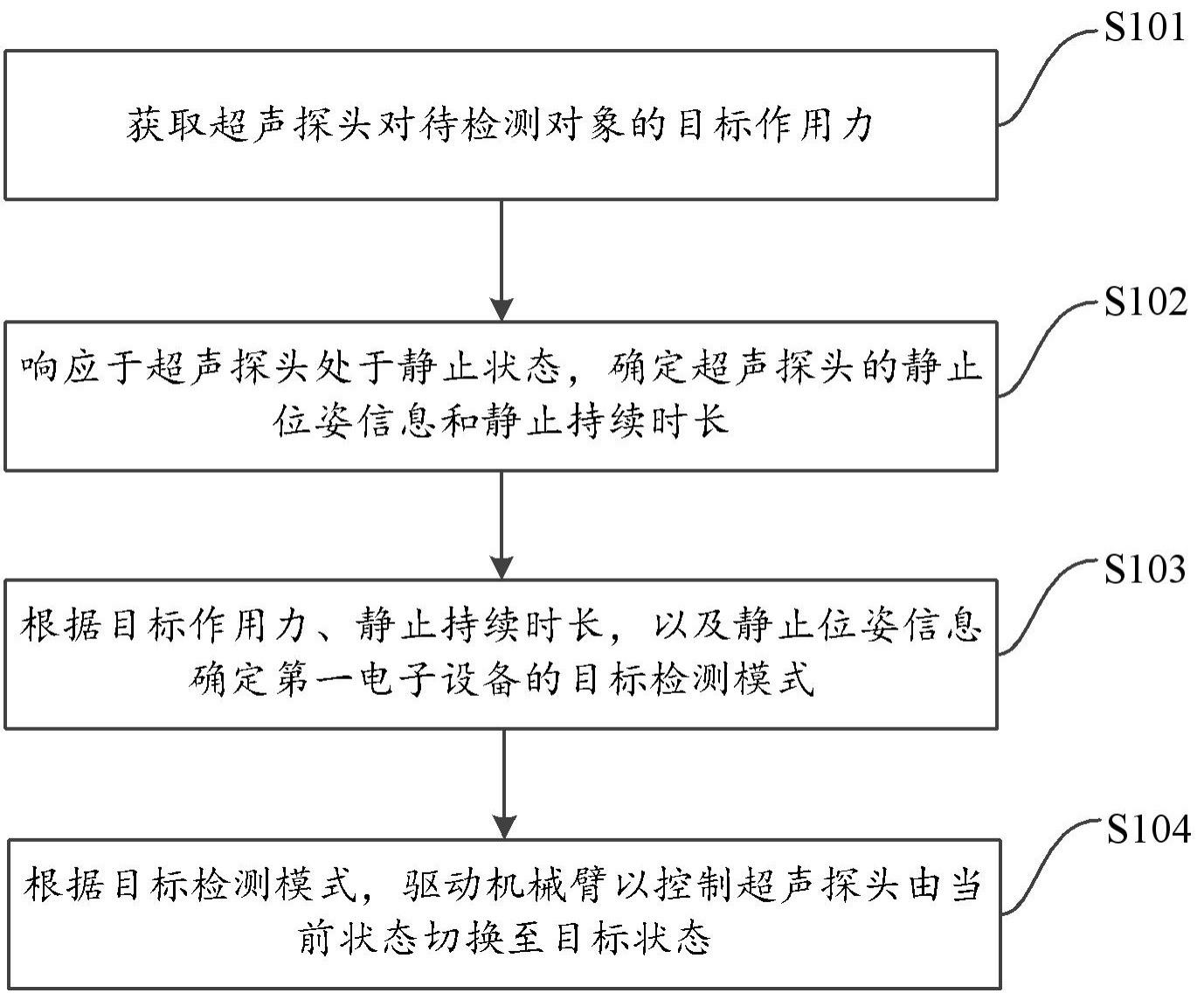
3、本公开第一方面实施例提出的超声探头的控制方法,被第一电子设备执行,第一电子设备至少包括:机械臂,以及与机械臂相连接的超声探头,方法包括:获取超声探头对待检测对象的目标作用力,并响应于超声探头处于静止状态,确定超声探头的静止位姿信息和静止持续时长,再根据目标作用力、静止持续时长,以及静止位姿信息确定第一电子设备的目标检测模式,以及根据目标检测模式,驱动机械臂以控制超声探头由当前状态切换至目标状态。
4、本公开第二方面实施例提出的超声探头的控制方法,被第二电子设备执行,方法包括:获取第一电子设备的目标检测模式,其中,目标检测模式由第一电子设备基于本设备的超声探头对待检测对象的目标作用力,以及超声探头处于静止状态时的静止位姿信息和静止持续时长确定得到,并根据目标检测模式,对超声探头进行目标控制。
5、本公开第三方面实施例提出的超声探头的控制装置,被第一电子设备执行,第一电子设备至少包括:机械臂,以及与机械臂相连接的超声探头,装置包括:第一获取模块,用于获取超声探头对待检测对象的目标作用力;第一确定模块,用于响应于超声探头处于静止状态,确定超声探头的静止位姿信息和静止持续时长;第二确定模块,用于根据目标作用力、静止持续时长,以及静止位姿信息确定第一电子设备的目标检测模式;第一控制模块,用于根据目标检测模式,驱动机械臂以控制超声探头由当前状态切换至目标状态。
6、本公开第四方面实施例提出的超声探头的控制装置,被第二电子设备执行,装置包括:第二获取模块,用于获取第一电子设备的目标检测模式,其中,目标检测模式由第一电子设备基于本设备的超声探头对待检测对象的目标作用力,以及超声探头处于静止状态时的静止位姿信息和静止持续时长确定得到;第二控制模块,用于根据目标检测模式,对超声探头进行目标控制。
7、本公开第五方面实施例提出的电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行程序时实现如本公开第一方面实施例提出的超声探头的控制方法,或者实现如本公开第二方面实施例提出的超声探头的控制方法。
8、本公开第六方面实施例提出了一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本公开第一方面实施例提出的超声探头的控制方法,或者实现如本公开第二方面实施例提出的超声探头的控制方法。
9、本公开第七方面实施例提出了一种计算机程序产品,当计算机程序产品中的指令由处理器执行时,执行如本公开第一方面实施例提出的超声探头的控制方法,或者实现如本公开第二方面实施例提出的超声探头的控制方法。
10、本公开实施例提出的超声探头的控制方法、装置、电子设备、存储介质以及计算机程序产品至少可以包括以下有益效果:第一电子设备通过获取超声探头对待检测对象的目标作用力,并响应于超声探头处于静止状态,确定超声探头的静止位姿信息和静止持续时长,再根据目标作用力、静止持续时长,以及静止位姿信息确定第一电子设备的目标检测模式,以及根据目标检测模式,驱动机械臂以控制超声探头由当前状态切换至目标状态。由此,第一电子设备能够基于超声探头的目标检测模式,驱动机械臂以控制超声探头由当前状态切换至与目标检测模式相适配的目标状态,从而能够有效满足第一电子设备在进行目标检测模式时对超声探头的状态需求。
11、本公开附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
技术特征:
1.一种超声探头的控制方法,其特征在于,被第一电子设备执行,所述第一电子设备至少包括:机械臂,以及与所述机械臂相连接的超声探头,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述第一电子设备还包括:力传感器;
3.如权利要求1或2所述的方法,其特征在于,所述根据所述目标作用力、所述静止持续时长,以及所述静止位姿信息确定所述第一电子设备的目标检测模式,包括:
4.如权利要求3所述的方法,其特征在于,所述目标作用力包括:水平作用力和垂直作用力;
5.如权利要求4所述的方法,所述根据所述目标检测模式驱动所述机械臂以控制所述超声探头由当前状态切换至目标状态,包括:
6.如权利要求5所述的方法,其特征在于,在所述驱动所述机械臂以控制所述超声探头由所述当前状态切换至运动状态之后,所述方法还包括:
7.一种超声探头的控制方法,其特征在于,被第二电子设备执行,所述方法包括:
8.如权利要求7所述的方法,其特征在于,所述获取第一电子设备的目标检测模式,包括:
9.如权利要求8所述的方法,其特征在于,所述根据所述目标状态,确定所述目标检测模式,包括:
10.如权利要求7-9任一项所述的方法,其特征在于,所述方法还包括:
11.如权利要求10所述的方法,其特征在于,所述根据所述静止位姿信息和所述目标检测模式,对所述超声探头进行目标控制,包括:
12.如权利要求11所述的方法,其特征在于,所述运动指令包括:所述超声探头的运动路线的信息;所述方法还包括:
13.一种超声探头的控制装置,其特征在于,被第一电子设备执行,所述第一电子设备至少包括:机械臂,以及与所述机械臂相连接的超声探头,所述装置包括:
14.一种超声探头的控制装置,其特征在于,被第二电子设备执行,所述装置包括:
15.一种电子设备,其特征在于,包括:
16.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,该程序被处理器执行时实现如权利要求1-6中任一项所述的超声探头的控制方法,或者实现如权利要求7-12任一项所述的超声探头的控制方法。
技术总结
本公开提出一种超声探头的控制方法、装置、电子设备及存储介质,方法被第一电子设备执行,第一电子设备包括:机械臂,以及与机械臂相连接的超声探头,方法包括:获取超声探头对待检测对象的目标作用力,并响应于超声探头处于静止状态,确定超声探头的静止位姿信息和静止持续时长,再根据目标作用力、静止持续时长,以及静止位姿信息确定第一电子设备的目标检测模式,以及根据目标检测模式,驱动机械臂以控制超声探头由当前状态切换至目标状态。第一电子设备能够基于超声探头的目标检测模式,驱动机械臂以控制超声探头由当前状态切换至与目标检测模式相适配的目标状态,从而能够有效满足第一电子设备在进行目标检测模式时对超声探头的状态需求。
技术研发人员:刘华辉,段宾,林维鹏,姚兴基,姚涛,伍利
受保护的技术使用者:深圳华大智造云影医疗科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!