三维成像数据获取系统、方法和三维成像方法与流程
本发明属于x射线成像,尤其涉及一种三维成像数据获取系统、方法和三维成像方法。
背景技术:
1、由于人体各种组织、器官在密度、厚度等方面存在差异,对投照在其上的x射线的吸收量各不相同,从而使透过人体的x射线强度分布发生变化并携带人体信息,最终形成x射线信息影像。基于此,人们先后研发出了二维的胶片x射线成像技术、计算机x线摄影术(英文computed radiography,简称cr)和数字x射线成像技术(英文digital radiography,简称dr),以及三维的计算机断层成像技术(英文computed tomography,简称ct)。随着技术的发展和应用需求的增加,cr、dr以及ct等基于x射线的检测技术也被应用到无损探伤检测、工业检测、安检等领域。
2、cr、dr数字x射线成像技术以其辐射小、成像快等优势被广泛使用,但是,其使用场景存在诸多局限性,比较突出的是,其只能进行二维投影成像,形成的图像容易受到待成像物体内部不同厚度处组织结构的干扰、或者外部物质的干扰,成像可用信息少。用于异常判断时,可信度低。ct虽然能形成待成像物体内部的三维结构图像,但是其需要围绕待成像物体的周向曝光多次,存在辐射量大,成像速度慢以及设备笨重且成本高等问题,这也限制着ct的推广。
3、因此,如何通过较少次的二维x射线成像形成3d成像,成为了x射线技术的未来,随着图像处理等计算机技术的发展,用二维的成像数据通过三维图像重建技术建立3d图像已经成为可能。
技术实现思路
1、申请人发现,虽然已经有一些算法支持使用多张二维图像进行三维重建,但是其不仅需要二维图像,还需要每张二维图像与待成像物体之间准确的距离、入射x射线位于待成像物体的哪个方位等。这就要求三维成像数据获取系统中具有很高精度的距离计算设备、严格控制x射线源、探测器以及待成像物体之间角度、距离的操控设备等。这使得三维成像技术,大大限制了三维成像技术的发展。
2、为了解决上述技术问题,本技术旨在提出一种三维成像数据获取系统、方法和三维成像方法,其提供的系统通过限制曝光成像机构的运动来实现获取多张不同相对位置处的投影数据,再通过简单的位置参数提取机构提取相对位置数据,将采集距离和控制x射线穿过物体的路径等通过预设的相对位置和限位机构来进行部分限制,具有投影数据与相对位置数据配合度高、对三维重建贡献高,降低了对采集距离和角度等的精度要求的同时,确保了能够获取高质量三维重建所需的数据!
3、本发明的技术方案如下:
4、本发明的一个方面,提供了一种三维成像数据获取系统,包括:曝光成像机构、限位机构和位置参数提取机构;
5、所述限位机构,用于控制所述曝光成像机构与待检测物之间的相对位置,使所述曝光成像机构先后到达与待检测物之间的不同相对位置处;
6、所述曝光成像机构,用于在多个相对位置处分别采集x射线对所述待检测物的投影数据;
7、所述位置参数提取机构,用于提取各个投影数据对应的,待检测物与所述曝光成像机构之间的相对位置,和/或所述曝光成像机构中x射线源、探测器之间的相对位置数据。
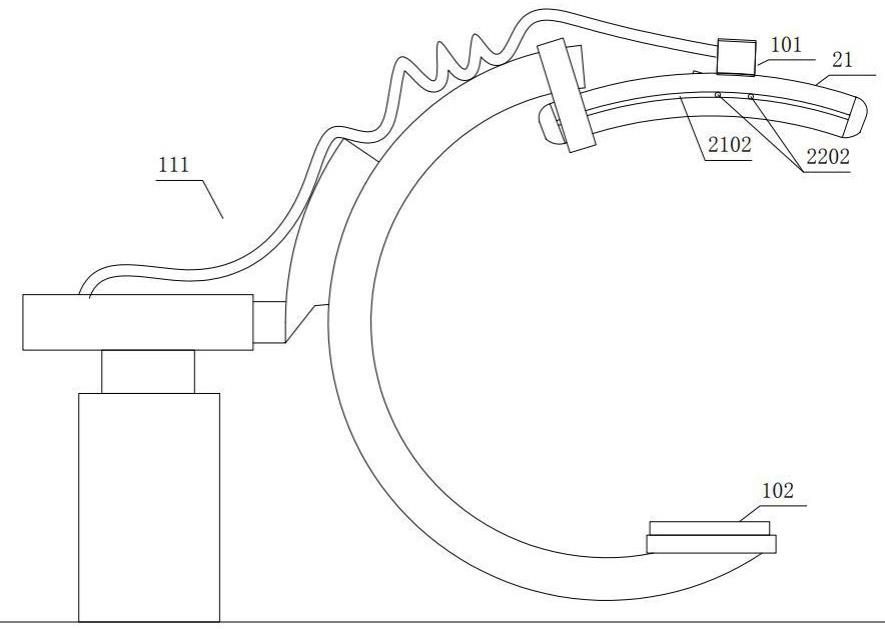
8、进一步地,所述限位机构包括轨道,沿所述轨道运动的运动块,和控制所述运动块沿所述轨道运动的运动控制模块;所述曝光成像机构与所述运动块对应连接。
9、进一步地,所述轨道呈弧形,且所述弧形所在圆的圆心处于所述探测器上;所述曝光成像机构的x射线源与所述运动块对应连接。
10、进一步地,两个所述轨道并排间隔设置,沿各所述轨道长度方向在其内均铺设有齿条;所述运动块包括第一安装架,穿装于所述第一安装架上的连接轴,和设置于所述连接轴上的多个运动齿轮,各个所述运动齿轮分别与对应的所述轨道上的齿条相啮合;所述曝光成像机构与所述第一安装架对应连接。
11、进一步地,所述轨道为滑轨,两个所述轨道并排间隔设置;所述运动块包括第二安装架,穿设于所述第二安装架上的连接轴,和设置于所述连接轴上多个滚轮,各个所述滚轮分别至于对应的所述滑轨内;所述曝光成像机构与所述第二安装架对应连接。
12、进一步地,当所述轨道内铺设所述齿条时,所述第一安装架上穿设间隔设置的两个所述连接轴,各个所述连接轴上均设有多个运动齿轮;所述连接轴上的各个齿轮分别与对应轨道上的齿条啮合;所述运动控制模块与至少一个所述连接轴连接。
13、进一步地,当所述轨道为滑轨时,所述第二安装架上穿设间隔设置的两个所述连接轴,各个所述连接轴上均设有多个滚轮;所述连接轴上的各个滚轮分别至于对应的所述滑轨内;所述运动控制模块与至少一个所述连接轴连接。
14、进一步地,所述运动控制模块包括电机、套设于所述电机输出轴上的主动齿轮、和固定于所述连接轴上的从动齿轮,所述主动齿轮与所述从动齿轮对应啮合。
15、进一步地,所述运动控制模块包括主动链轮、套设于所述连接轴上的从动链轮,连接所述主动链轮与所述从动链轮的传动链条,和带动所述主动链轮转动的转动把手;所述主动链轮位于所述轨道所在圆形的圆心处。
16、进一步地,所述运动控制模块包括主同步轮、套设于所述连接轴上的从同步轮,连接所述从同步轮与所述主同步轮的同步带,和带动所述主同步轮转动的转动把手;所述主同步轮位于所述轨道所在圆形的圆心处。
17、进一步地,所述位置参数提取机构包括设置于所述连接轴上的转数计量仪,用于根据所述连接轴的转动圈数提取当前所述曝光成像机构所处的位置;或者,所述位置参数提取机构包括沿所述轨道长度方向均匀布设的多个光电耦合器,用于根据被阻断光电耦合器所处的位置提取当前所述曝光成像机构所处的位置;或者,所述位置参数提取机构包括刻度提取摄像机,以及沿所述轨道长度方向设置于所述轨道外壁上的位置刻度和设置于所述曝光成像机构上指向所述位置刻度的第一指针。
18、进一步地,所述位置参数提取机构包括刻度提取摄像机、设置于所述主动链轮上的角度刻度和指向所述角度刻度的第二指针。
19、本发明的另一方面,提供了一种三维成像数据获取方法,包括应用如上任一项所述的三维成像数据获取系统获取三维成像数据。
20、进一步地,包括以下步骤:
21、用限位机构控制曝光成像机构与待检测物之间的相对位置,使曝光成像机构先后到达与待检测物之间的不同相对位置处;
22、用曝光成像机构,在多个相对位置处分别采集x射线对所述待检测物的投影数据;
23、用位置参数提取机构,提取各个投影数据对应的,待检测物与所述曝光成像机构之间的相对位置,和/或所述曝光成像机构中x射线源、探测器之间的相对位置数据。
24、进一步地,所述限位机构包括呈弧形的轨道、运动块和运动控制模块;所述用限位机构控制曝光成像机构与待检测物之间的相对位置,包括:
25、用所述运动控制模块控制所述运动块在所述轨道内运动,以带动曝光成像机构的x射线源沿所述轨道运动;在运动过程中所述x射线源的焦点位于所述曝光成像机构的探测器上。
26、进一步地,用位置参数提取机构,提取各个投影数据对应的,待检测物与所述曝光成像机构之间的相对位置,和/或所述曝光成像机构中x射线源、探测器之间的相对位置数据,包括:
27、当所述位置参数提取机构包括设置于连接轴上的转数剂量仪时,用所述转数剂量仪获取各个投影数据对应的相对位置处,所述连接轴的转动圈数;
28、当所述位置参数提取机构包括沿所述轨道长度方向均匀布设的多个光电耦合器时,提取各个投影数据对应的被阻断光电耦合器所处的位置;
29、当所述位置参数提取机构包括第一指针、位置刻度和刻度提取摄像机时,提取所述刻度提取摄像机拍摄的视频中,与各个投影数据对应的时刻,所述第一指针指示的位置刻度;
30、当所述位置参数提取机构包括第二指针、角度刻度和刻度提取摄像机时,提取所述刻度提取摄像机拍摄的视频中,与各个投影数据对应的时刻,所述第二指针指示的角度。
31、本发明的又一方面,提供了一种三维成像方法,包括应用如上任一项所述的三维成像数据获取系统获取三维成像数据,以及进行三维重建,具体包括以下步骤:
32、用限位机构控制曝光成像机构先后到达各个相对位置处;
33、在各个相对位置处,用曝光成像机构采集x射线对所述待检测物的投影数据;
34、用三维重建系统根据各个相对位置处的投影数据,以及预存的各个相对位置处的x射线源、与探测器和/或待检测物之间的相对位置数据进行三维重建。
35、进一步地,一次三维成像数据获取中,各个相对位置处的投影数据的集合为二维图像数据组;所述方法还包括:
36、用三维重建系统建立三维图像中各个体素值与二维图像数据组中图像像素值之间的映射关系,得到映射关系组;
37、基于所述映射关系组和输入的二维图像数据组,建立三维重建图像。
38、进一步地,一次三维成像数据获取对应的多个相对位置为一个相对位置组;所述方法还包括:
39、建立不同的相对位置组对应的,三维图像各体素值与二维图像组中图像像素值之间的映射关系,得到分别与各个相对位置组对应匹配的多个预设映射关系组;
40、根据输入到所述三维重建系统中的投影数据,选择与所述投影数据相匹配的预设映射关系组;
41、基于所述相匹配的预设映射关系组和输入的投影数据建立三维图像。
42、本发明的有益效果在于:
43、1. 本发明的三维成像数据获取系统、方法和三维成像方法,针对现有三维成像技术需要每张dr图像与待成像物体之间准确的距离、入射x射线精确地位于待成像物体的哪个方位等严格的几何信息,造成要求三维成像数据获取系统中,必须具有很高精度的距离计算设备、严格控制和计算x射线源、探测器以及待成像物体之间角度的操控设备和角度计算设备等问题。使得三维成像技术并不适合广泛使用,大大限制了三维成像技术的发展。本发明采用包括所述限位机构、所述曝光成像机构和所述位置参数获取机构的设计。通过限制曝光成像机构的运动来实现获取多张不同相对位置处的投影数据,再通过简单的位置参数提取机构提取相对位置数据,将控制x射线穿过物体的路径与采集路径相关参数相配合,使采集的投影数据与相对位置数据配合度高、对三维重建贡献高,实现了在不影响成像的同时,降低了对x射线源、探测器以及待成像物体之间相对位置控制精确程度的要求,也降低了采集距离和角度等的精度要求,有助于降低成本、提高效率!应用本系统进行三维成像具有曝光次数少、辐射小、成像包含信息多、成像速度快、价格低、可推广性高等优点。
44、2. 本发明采用所述限位机构包括所述轨道、运动块和运动控制模块,所述曝光成像机构与所述运动块对应连接的设计;所述运动块在所述轨道内运动时带动所述曝光成像机构运动,将运动块在轨道上运动稳定的特点用于曝光成像机构,保证了曝光成像机构的稳定性,有效确保了对所述曝光成像机构控制的精确性,同时减少运动伪影。
- 还没有人留言评论。精彩留言会获得点赞!