粒子介入穿刺手术装置、机器人及使用方法与流程
本申请实施例涉及但不限于医学领域,尤其涉及粒子介入穿刺手术装置、机器人及使用方法。
背景技术:
1、伴随着现代医疗技术的发展和社会的进步,癌症肿瘤的诊断治疗方式有多种,主要包括有手术切除、射频消融、冷冻和放射性粒子治疗。其中,粒子介入治疗具有微创的优点,介入穿刺机器人被开发应用到粒子介入治疗中。但介入穿刺机器人存在信息反馈缺失的缺点,导致对组织结构定位或者对组织属性评估的缺失,也容易使在旋拧针头的过程中给组织造成创伤或损害。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本申请的目的在于至少一定程度上解决相关技术中存在的技术问题之一,本申请实施例提供了一种粒子介入穿刺手术装置,能够根据所述位置和所述作用力控制外针的进针速度、旋转角度和旋转角速度,并使外针按照规划路径进行穿刺。
3、本申请的第一方面的实施例,一种粒子介入穿刺手术装置,包括:
4、支架;
5、外针夹持单元,所述外针夹持单元夹持有外针,所述外针夹持单元设有连接组件,所述外针夹持单元通过所述连接组件滑动连接于调心轴承以与所述支架连接;
6、内针夹持单元,所述外针夹持单元通过所述连接组件与所述内针夹持单元连接,所述内针夹持单元夹持有内针,并将内针固定在所述外针夹持单元上;
7、粒子释放器,所述外针夹持单元通过所述连接组件与所述粒子释放器连接,所述粒子释放器用于辅助将放射粒子通过外针释放;
8、旋拧单元,所述旋拧单元与所述外针夹持单元传动连接,所述旋拧单元用于驱动所述外针夹持单元转动;
9、力测量单元,所述外针夹持单元通过所述连接组件安装在所述力测量单元上,所述力测量单元用于测量外针的作用力;
10、定位单元,所述定位单元设置在所述支架上,所述定位单元用于检测外针的位置。
11、本申请的第一方面的某些实施例,所述连接组件包括法兰夹持筒,所述法兰夹持筒的一端滑动连接于套筒,所述套筒套在所述调心轴承上。
12、本申请的第一方面的某些实施例,所述外针夹持单元设有第一外针适配夹和第二外针适配夹,所述内针夹持单元包括第一卡扣和第二卡扣,所述第一卡扣和所述第二卡扣共同锁住内针,所述第一卡扣和所述第二卡扣扣在所述第一外针适配夹和所述第二外针适配夹的凸起处,所述第二卡扣与所述连接组件锁紧。
13、本申请的第一方面的某些实施例,所述定位单元包括靶球支架和多个对反射近红外光具有敏感性的靶球,多个所述靶球安装在所述靶球支架,所述靶球支架与所述支架连接。
14、本申请的第一方面的某些实施例,所述外针夹持单元的前端设有弹簧夹头和夹头螺母,所述夹头螺母套设于所述弹簧夹头上。
15、本申请的第一方面的某些实施例,所述支架设有安装腔,所述内针夹持单元和所述粒子释放器均设置于所述安装腔中。
16、本申请的第一方面的某些实施例,所述旋拧单元包括包括驱动器和第一齿轮,所述驱动器的输出端所述第一齿轮连接;所述外针夹持单元连接有法兰轴套,所述法兰轴套上设有第二齿轮;所述第一齿轮与所述第二齿轮啮合连接。
17、本申请的第一方面的某些实施例,所述力测量单元通过所述法兰轴套套设在轴承上以安装在所述支架上。
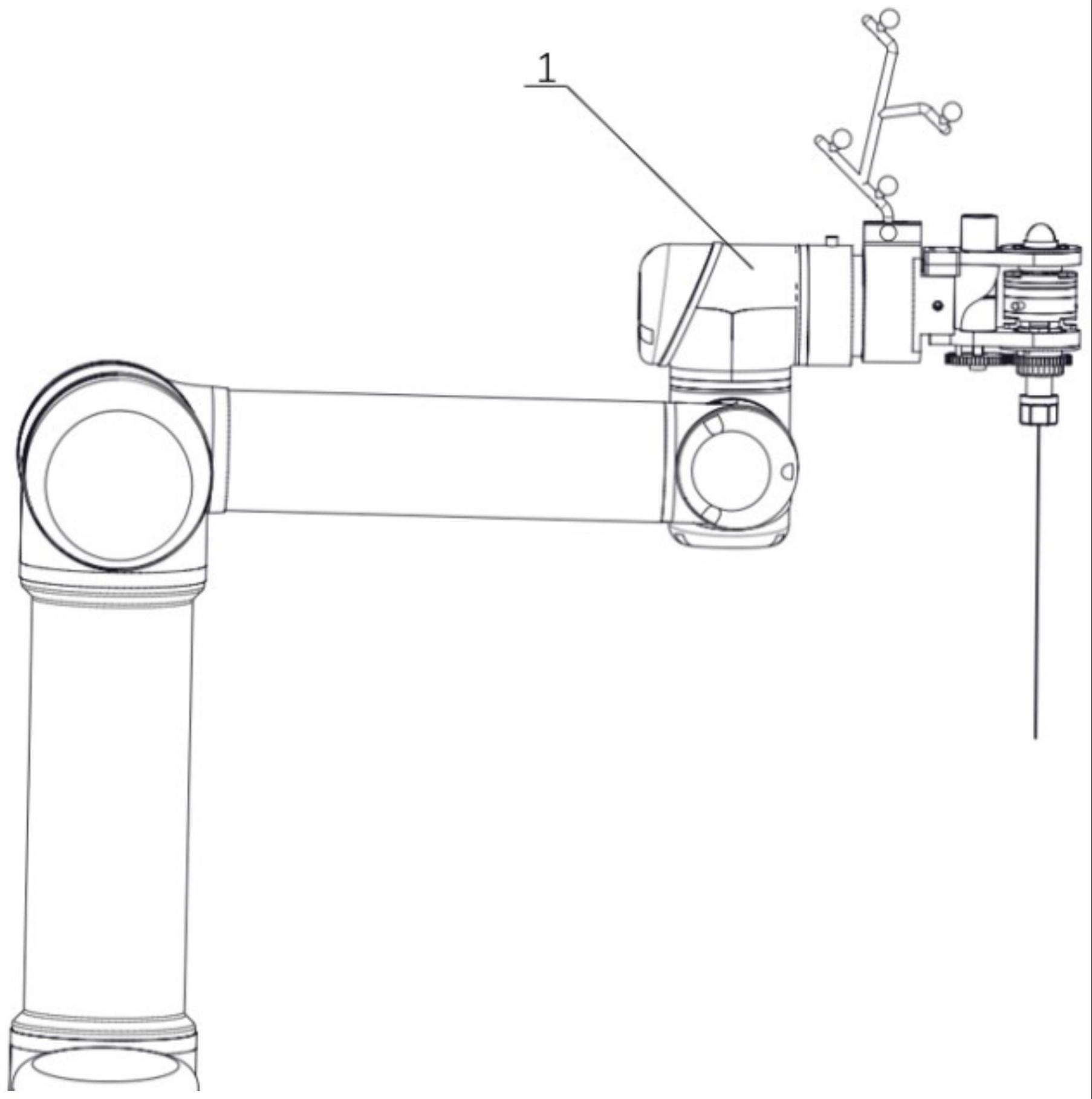
18、本申请的第二方面的实施例,粒子介入穿刺机器人,包括控制器、机械臂和如上所述的粒子介入穿刺手术装置,所述粒子介入穿刺手术装置安装在所述机械臂上,所述控制器用于控制所述机械臂和所述粒子介入穿刺手术装置运行。
19、本申请的第三方面的实施例,粒子介入穿刺机器人的使用方法,应用于如上所述的粒子介入穿刺机器人,所述使用方法包括:
20、通过外针夹持单元夹持外针,通过内针夹持单元夹持内针,将所述内针夹持单元安装到支架上并将内针固定在所述外针夹持单元上;
21、控制机械臂扎入外针,通过定位单元获取外针的位置,通过力测量单元获取外针的作用力,根据所述位置和所述作用力控制外针的进针速度、旋转角度和旋转角速度,并使外针按照规划路径进行穿刺,直至外针到达目标位置;
22、取出内针夹持单元和内针,将粒子释放器安装到支架上并使所述粒子释放器与所述外针夹持单元连接,通过所述粒子释放器辅助将放射粒子通过外针释放;
23、控制机械臂拔出外针。
24、上述方案至少具有以下的有益效果:通过定位单元获取外针的位置,通过力测量单元获取外针的作用力,根据外针的位置和外针的作用力,控制机械臂的姿态以控制外针的进针速度,控制旋拧单元运行以控制外针的旋转角度和旋转角速度,控制机械臂使外针按照规划路径进行穿刺,通过对穿刺过程中六维力信息、外针姿态和位置的实时反馈使得对粒子介入穿刺手术装置的调整更迅速和准确,缩短手术时间,提高手术安全性。
技术特征:
1.一种粒子介入穿刺手术装置,其特征在于,包括:
2.根据权利要求1所述的一种粒子介入穿刺手术装置,其特征在于,所述连接组件包括法兰夹持筒,所述法兰夹持筒的一端滑动连接于套筒,所述套筒套在所述调心轴承上。
3.根据权利要求1所述的一种粒子介入穿刺手术装置,其特征在于,所述外针夹持单元设有第一外针适配夹和第二外针适配夹,所述内针夹持单元包括第一卡扣和第二卡扣,所述第一卡扣和所述第二卡扣共同锁住内针,所述第一卡扣和所述第二卡扣扣在所述第一外针适配夹和所述第二外针适配夹的凸起处,所述第二卡扣与所述连接组件锁紧。
4.根据权利要求1所述的一种粒子介入穿刺手术装置,其特征在于,所述定位单元包括靶球支架和多个对反射近红外光具有敏感性的靶球,多个所述靶球安装在所述靶球支架,所述靶球支架与所述支架连接。
5.根据权利要求1所述的一种粒子介入穿刺手术装置,其特征在于,所述外针夹持单元的前端设有弹簧夹头和夹头螺母,所述夹头螺母套设于所述弹簧夹头上。
6.根据权利要求1所述的一种粒子介入穿刺手术装置,其特征在于,所述支架设有安装腔,所述内针夹持单元和所述粒子释放器均设置于所述安装腔中。
7.根据权利要求1所述的一种粒子介入穿刺手术装置,其特征在于,所述旋拧单元包括包括驱动器和第一齿轮,所述驱动器的输出端所述第一齿轮连接;所述外针夹持单元连接有法兰轴套,所述法兰轴套上设有第二齿轮;所述第一齿轮与所述第二齿轮啮合连接。
8.根据权利要求7所述的一种粒子介入穿刺手术装置,其特征在于,所述力测量单元通过所述法兰轴套套设在轴承上以安装在所述支架上。
9.粒子介入穿刺机器人,其特征在于,包括控制器、机械臂和如权利要求1至8任一项所述的粒子介入穿刺手术装置,所述粒子介入穿刺手术装置安装在所述机械臂上,所述控制器用于控制所述机械臂和所述粒子介入穿刺手术装置运行。
10.粒子介入穿刺机器人的使用方法,其特征在于,应用于如权利要求9所述的粒子介入穿刺机器人,所述使用方法包括:
技术总结
本申请实施例提供了粒子介入穿刺手术装置、机器人及使用方法,装置包括支架、外针夹持单元、内针夹持单元、粒子释放器、旋拧单元、力测量单元和定位单元;通过定位单元获取外针的位置,通过力测量单元获取外针的作用力,根据外针的位置和外针的作用力,控制机械臂的姿态以控制外针的进针速度,控制旋拧单元运行以控制外针的旋转角度和旋转角速度,控制机械臂使外针按照规划路径进行穿刺,通过对穿刺过程中六维力信息、外针姿态和位置的实时反馈,使得对粒子介入穿刺手术装置的调整更迅速和准确,缩短手术时间,提高手术安全性。
技术研发人员:段奔放,滕皋军,王澄,梁统生,陈世佳
受保护的技术使用者:珠海横乐医学科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!