一种医疗导航控制方法、装置、设备及存储介质与流程
本申请涉及医疗器械,尤其涉及一种医疗导航控制方法、装置、设备及存储介质。
背景技术:
1、内窥镜广泛应用于不同科室的介入治疗,例如在肺部诊疗的临床实践中,通常是基于患者的影像数据建立患者肺部的三维模型,医生根据三维模型控制内窥镜导管在患者肺部腔道内游走,从而对患者进行诊疗。在此过程中,医生大多是根据采集到的实时图像画面来确定导管当前位置,从而避免因导管与患者体内组织发生碰撞而产生的人体组织损伤,但这种方式依赖于肉眼观察,准确率较低。因此,需要建立一个力反馈机制以在导管与人体组织发生碰撞时,对医生进行及时提醒,实现精准医疗导航。
2、目前在医疗领域内,力反馈机制有一种技术路线,是在内窥镜导管头端设置力反馈传感器采集导管受力数据,并基于导管受力数据进行相应的力反馈。但受限于进入人体自然腔道的导管尺寸,且导管末端设置力反馈传感器对于工艺、材料等都有极高的要求,设置力反馈传感器会导致内窥镜导管头端体积增大,无法经过较细腔道到达预设位置,影响诊疗效果。因此,亟需一种能够准确进行医疗导航的解决方案。
技术实现思路
1、本申请的多个方面提供一种医疗导航控制方法、装置、设备及存储介质,用以基于多个因素较为准确地确定力反馈信息,从而向操作人员输出较为准确的反馈信号。
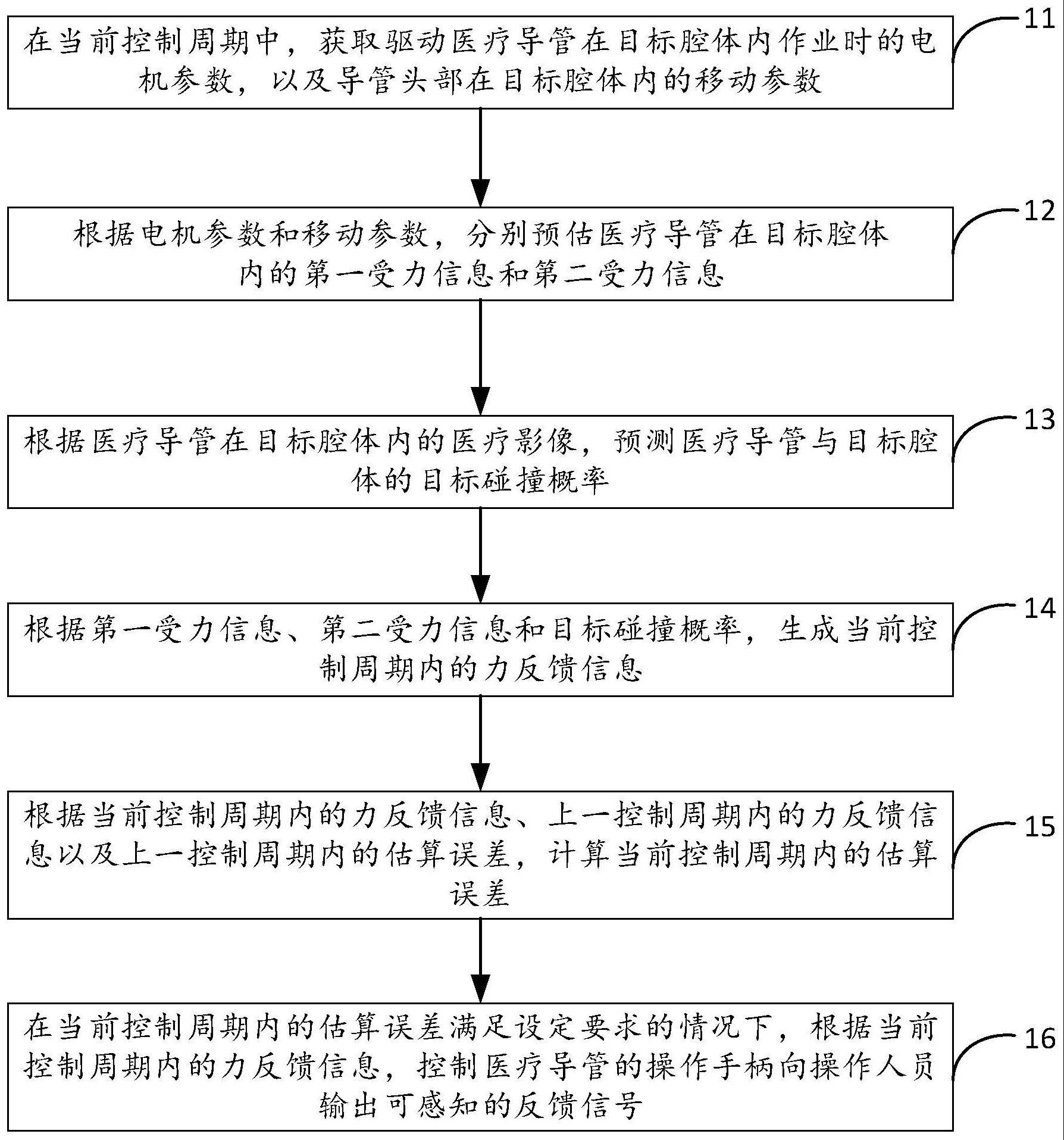
2、本申请实施例提供一种医疗导航控制方法,用于在医疗导管作业过程中对所述医疗导管进行导航控制,应用于与所述医疗导管电连接的医疗控制终端,所述方法包括:在当前控制周期中,获取驱动所述医疗导管在目标腔体内作业时的电机参数,以及导管头部在所述目标腔体内的移动参数;根据所述电机参数和所述移动参数,分别预估所述医疗导管在所述目标腔体内的第一受力信息和第二受力信息;根据所述医疗导管在所述目标腔体内的医疗影像,预测所述医疗导管与所述目标腔体的目标碰撞概率;根据所述第一受力信息、第二受力信息和所述目标碰撞概率,生成当前控制周期内的力反馈信息;根据当前控制周期内的力反馈信息、上一控制周期内的力反馈信息以及所述上一控制周期内的估算误差,计算所述当前控制周期内的估算误差;在所述当前控制周期内的估算误差满足设定要求的情况下,根据所述当前控制周期内的力反馈信息,控制所述医疗导管的操作手柄向操作人员输出可感知的反馈信号。
3、进一步可选地,所述电机参数包括:多个电机各自的位移和拉力;根据所述电机参数,预估所述医疗导管在所述目标腔体内的第一受力信息,包括:根据所述多个电机各自的位移和拉力,从所述多个电机中选取处于非空行程的至少一个目标电机;所述至少一个目标电机的位移大于第一阈值;所述至少一个目标电机的拉力大于第二阈值;根据所述至少一个目标电机的拉力以及预设的第一计算系数,计算所述至少一个目标电机的合力,作为所述医疗导管的第一受力信息。
4、进一步可选地,所述移动参数包括:移动距离;根据所述移动参数,预估所述医疗导管在所述目标腔体内的第二受力信息,包括:根据所述移动距离以及预设的距离阈值,判断所述医疗导管是否发生位置突变;在所述医疗导管未发生位置突变的情况下,若所述移动距离处于第一预设距离范围内,确定所述第二受力为0;所述距离阈值小于所述第一预设距离范围的下限值;若所述移动距离未处于所述第一预设距离范围内,则根据当前已迭代的周期数、预设的第二计算系数以及单位位移所产生的受力信息,确定所述医疗导管在所述目标腔体中的第二受力信息。
5、进一步可选地,所述移动参数还包括:位移方向变化量;所述方法还包括:在所述医疗导管发生位置突变的情况下,若所述移动距离处于第二预设距离范围内,确定所述第二受力为0;所述第二预设距离范围大于所述第一预设距离范围;若所述移动距离不处于所述第二预设距离范围内或者所述位移方向变化量大于预设的变化量阈值,则根据预设的第三计算系数以及所述单位位移所产生的受力信息,计算所述医疗导管在所述目标腔体中的第二受力信息。
6、进一步可选地,根据所述第一受力信息、第二受力信息和所述目标碰撞概率,生成当前控制周期内的力反馈信息,包括:根据所述目标碰撞概率,查询预设的碰撞概率和受力信息的正相关对应关系,得到所述医疗导管在所述目标腔体中的第三受力信息;根据所述第一受力信息、所述第二受力信息以及所述第三受力信息,生成所述当前控制周期内的力反馈信息。
7、进一步可选地,根据当前控制周期内的力反馈信息、上一控制周期内的力反馈信息以及上一控制周期内的估算误差,计算所述当前控制周期内的估算误差,包括:利用卡尔曼滤波算法,根据所述上一控制周期内的估算误差以及所述当前控制周期的测量误差,计算卡尔曼增益;根据所述卡尔曼增益以及所述当前控制周期内的力反馈信息,确定所述当前控制周期内的估算误差。
8、进一步可选地,所述反馈信号为振动信号、音频信号和光信号中的至少一种。
9、本申请实施例还提供一种医疗导航控制装置,包括:参数获取模块,用于:在当前控制周期中,获取驱动医疗导管在目标腔体内作业时的电机参数,以及导管头部在所述目标腔体内的移动参数;受力预估模块,用于:根据所述电机参数和移动参数,分别预估所述医疗导管在所述目标腔体内的第一受力信息和第二受力信息;概率预测模块,用于:根据所述医疗导管在所述目标腔体内的医疗影像,预测所述医疗导管与所述目标腔体的目标碰撞概率;反馈生成模块,用于根据所述第一受力信息、第二受力信息和所述目标碰撞概率,生成当前控制周期内的力反馈信息;误差计算模块,用于:根据当前控制周期内的力反馈信息、上一控制周期内的力反馈信息以及所述上一控制周期内的估算误差,计算所述当前控制周期内的估算误差;反馈输出模块:在所述当前控制周期内的估算误差满足设定要求的情况下,根据所述当前控制周期内的力反馈信息,控制所述医疗导管的操作手柄向操作人员输出可感知的反馈信号。
10、本申请实施例还提供一种医疗控制终端,包括:存储器和处理器;其中,所述存储器用于:存储一个或多个计算机指令;所述处理器用于执行所述一个或多个计算机指令,以用于:执行所述医疗导航控制方法中的步骤。
11、本申请实施例还提供一种计算机可读存储介质,当所述计算机程序被处理器执行时,致使所述处理器能够实现所述医疗导航控制方法中的步骤。
12、在本实施例中,可在当前控制周期中获取电机参数和导管头部在腔体内的移动参数;根据电机参数和移动参数,分别预估医疗导管在腔体内的不同受力信息;根据医疗导管在腔体内的影像预测碰撞概率;根据不同受力信息和碰撞概率,生成当前控制周期内的力反馈信息;根据当前控制周期和上一控制周期内的力反馈信息,以及上一控制周期内的估算误差,计算当前控制周期内的估算误差;在满足条件时可根据当前控制周期内的力反馈信息,控制导管手柄输出可感知的反馈信号。通过这种方式,无需设置力反馈传感器,可基于多个因素较为准确地确定力反馈信息,从而向操作人员输出较为准确的反馈信号,进而较为准确地进行医疗导航。
技术特征:
1.一种医疗导航控制方法,其特征在于,用于在医疗导管作业过程中对所述医疗导管进行导航控制,应用于与所述医疗导管电连接的医疗控制终端,所述方法包括:
2.根据权利要求1所述的方法,所述电机参数包括:多个电机各自的位移和拉力;
3.根据权利要求1所述的方法,所述移动参数包括:移动距离;
4.根据权利要求3所述的方法,所述移动参数还包括:位移方向变化量;
5.根据权利要求1所述的方法,根据所述第一受力信息、第二受力信息和所述目标碰撞概率,生成当前控制周期内的力反馈信息,包括:
6.根据权利要求1所述的方法,根据当前控制周期内的力反馈信息、上一控制周期内的力反馈信息以及上一控制周期内的估算误差,计算所述当前控制周期内的估算误差,包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,所述反馈信号为振动信号、音频信号和光信号中的至少一种。
8.一种医疗导航控制装置,其特征在于,包括:
9.一种医疗控制终端,其特征在于,包括:存储器和处理器;其中,所述存储器用于:存储一个或多个计算机指令;所述处理器用于执行所述一个或多个计算机指令,以用于:执行权利要求1-8任一项所述的方法中的步骤。
10.一种计算机可读存储介质,其特征在于,当所述计算机程序被处理器执行时,致使所述处理器能够实现权利要求1-8任一项所述方法中的步骤。
技术总结
本申请实施例提供一种医疗导航控制方法、装置、设备及存储介质。在该方法中,可在当前控制周期获取电机参数和移动参数;根据电机参数和移动参数,分别预估导管的受力信息;根据导管在腔体内的影像预测碰撞概率;根据不同受力信息和碰撞概率,生成当前控制周期的力反馈信息;根据当前控制周期和上一控制周期的力反馈信息,以及上一控制周期的估算误差,计算当前控制周期的估算误差;在满足条件时可根据当前控制周期的力反馈信息,控制导管手柄输出可感知的反馈信号。通过这种方式,无需设置力反馈传感器,可基于多个因素较为准确地确定力反馈信息,从而向操作人员输出较为准确的反馈信号,进而较为准确地进行医疗导航。
技术研发人员:佘文波,吴晓军
受保护的技术使用者:常州朗合医疗器械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!