一种手术导航标尺的导航配准方法及装置与流程
本发明涉及医疗器械,特别涉及一种手术导航标尺的导航配准方法及装置。
背景技术:
1、在手术导航过程中,为了实现影像空间与手术空间的精确匹配,医生需要进行准确的配准和定位,从而进行精确的手术操作。现有的标尺和定位器通常需要分开使用,在手术过程中不得不反复拆装。这种重复拆装可能导致精度损失、手术过程繁琐、病人出血时间延长以及术中感染风险增加等问题。
2、为了解决上述技术问题,申请号为cn202310569335.4、名称为一种3d手术导航标尺及导航配准方法的在先专利申请公开了一种将标尺与定位器的功能整合于一体的3d手术导航标尺及导航配准方法,但是该导航配准方法更侧重于通过坐标转换实现手术的导航定位,其并未公开如何具体的用导航标尺对双圆环特征点进行标定和排序,而对双圆环特征点进行高效准确的标定和排序是手术导航定位的基础。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本发明提供了一种手术导航标尺的导航配准方法及装置,以全部或部分的解决上述技术问题。
2、本发明的一个方面,提供了一种手术导航标尺的导航配准方法,包括:
3、当所述手术导航标尺位于闭合状态时,手术导航标尺包括可在医学成像设备下成像的第一圆形部、第二圆形部和线段部;其中,所述第一圆形部和所述第二圆形部同轴,所述第一圆形部的直径小于所述第二圆形部的直径,所述线段部沿着所述第一圆形部的径向方向延伸;当所述手术导航标尺位于打开状态时,所述第一圆形部和所述第二圆形部被分割为四个半圆形;
4、所述导航配准方法包括如下步骤:
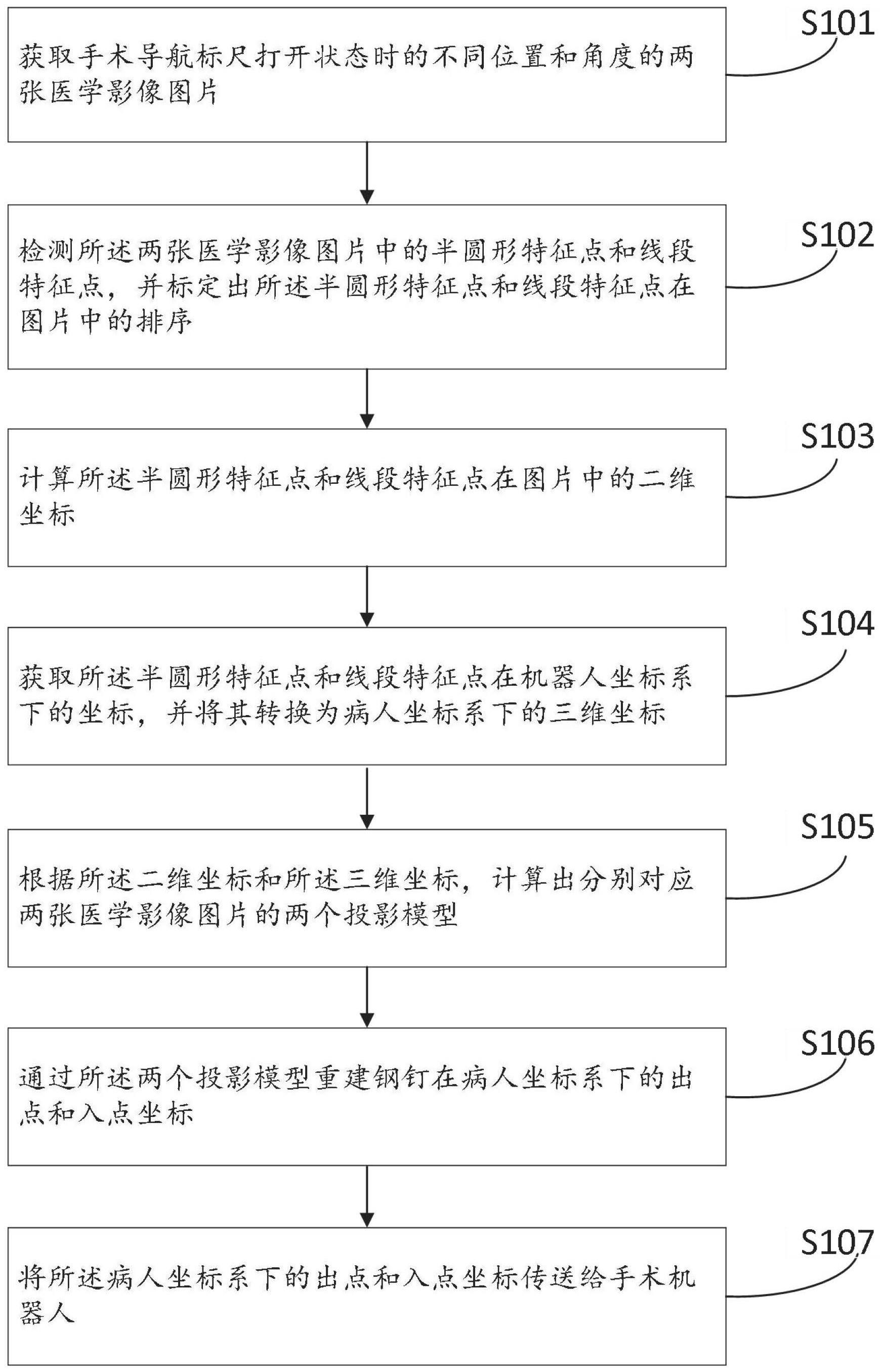
5、获取手术导航标尺打开状态时的不同位置和角度的两张医学影像图片;
6、检测所述两张医学影像图片中的半圆形特征点和线段特征点,并标定出所述半圆形特征点和线段特征点在图片中的排序;
7、计算所述半圆形特征点和线段特征点在图片中的二维坐标;
8、获取所述半圆形特征点和线段特征点在机器人坐标系下的坐标,并将其转换为病人坐标系下的三维坐标;
9、根据所述二维坐标和所述三维坐标,计算出分别对应两张医学影像图片的两个投影模型;
10、通过所述两个投影模型重建钢钉在病人坐标系下的出点和入点坐标;
11、将所述病人坐标系下的出点和入点坐标传送给手术机器人。
12、进一步的,检测所述两张医学影像图片中的半圆形特征点和线段特征点的步骤,包括:
13、根据第一圆形部和第二圆形部给定的最小半径和最大半径,对所述医学影像图片进行霍夫变换圆形检测,识别出图片中所有满足圆形特征的点;
14、通过轮廓检测算法对识别出的满足圆形特征的点进行分类,将包含点数最多的一组点,作为检测出的半圆形上的特征点;
15、对所述医学影像图片进行边缘检测,再利用霍夫变换对边缘检测后获得的图像进行线段检测,得到检测出的直线;
16、计算所述检测出的直线的两个端点的坐标,将与半圆形上的特征点距离最小的端点作为线段特征点;
17、将检测得到的8个半圆形特征点和1个线段特征点组成的9个特征点的坐标数据作为待标定数据组,所述8个半圆形特征点为所述四个半圆形的8个端点。
18、进一步的,所述标定出所述半圆形特征点和线段特征点在图片中的排序的步骤,包括:
19、根据以往的医学影像图片经手工配准的9个特征点坐标数据制作为第一模板;所述9个特征点为构成第一圆形部和第二圆形部的四个半圆形的8个端点特征点和1个线段特征点;
20、根据所述第一模板计算9个特征点两两之间的欧氏距离,将每个特征点与其它8个特征点之间的欧氏距离划分为一组,共形成9组数据,将该9组数据作为第二模板。
21、进一步的,所述标定出所述半圆形特征点和线段特征点在图片中的排序的步骤,还包括:
22、计算所述待标定数据组中9个特征点的几何中心p0;
23、选取9个特征点中的一个点记为pi,其中i=1,2,…,9,计算该点pi与其它点pm之间的欧式距离,其中m=1,...,i,...,9并且m≠i,将得到的8个欧式距离按数值大小降序排列为pi1,pi2,…,pi9;
24、计算9个特征点对应的9组几何特征矩阵,每个点pi的几何特征矩阵可表示为:其中,pi0表示点pi与几何中心p0之间的欧式距离;
25、将计算得到的9组几何特征矩阵依次与所述第二模板的每组数据进行一对一比较,计算出每组几何特征矩阵和第二模板每组数据之间的欧式距离,对计算出的每组欧式距离求和,将结果作为该医学影像图片的特征点和所述第二模板之间的匹配误差;
26、依次遍历所有候选第二模板,得到所有候选第二模板和该医学影像图片的特征点之间的匹配误差,选取匹配误差最小的第二模板作为匹配模板;
27、将该匹配模板对应的手工配准的特征点排序,作为所述待标定数据组的排序。
28、进一步的,检测所述两张医学影像图片中的半圆形特征点和线段特征点的步骤,还包括:
29、将医学影像图片转换为灰度图像,对灰度图像进行形态学开运算,以消除噪声。
30、本发明的另一方面,还提供了一种手术导航标尺的导航配准装置,包括:
31、手术导航标尺,当其位于闭合状态时,包括可在医学成像设备下成像的第一圆形部、第二圆形部和线段部;其中,所述第一圆形部和所述第二圆形部同轴,所述第一圆形部的直径小于所述第二圆形部的直径,所述线段部沿着所述第一圆形部的径向方向延伸;当其位于打开状态时,所述第一圆形部和所述第二圆形部被分割为四个半圆形;
32、以及,导航配准模块,包括:
33、图像获取模块,被配置为获取手术导航标尺打开状态时的不同位置和角度的两张医学影像图片;
34、标定模块,被配置为检测所述两张医学影像图片中的半圆形特征点和线段特征点,并标定出所述半圆形特征点和线段特征点在图片中的排序;
35、第一坐标获取模块,被配置为计算所述半圆形特征点和线段特征点在图片中的二维坐标;
36、第二坐标获取模块,被配置为获取所述半圆形特征点和线段特征点在机器人坐标系下的坐标,并将其转换为病人坐标系下的三维坐标;
37、路径规划模块,被配置为根据所述二维坐标和所述三维坐标,计算出分别对应两张医学影像图片的两个投影模型;通过所述两个投影模型重建钢钉在病人坐标系下的出点和入点坐标;
38、输出模块,被配置为将所述病人坐标系下的出点和入点坐标传送给手术机器人。
39、进一步的,所述标定模块被配置为:
40、根据第一圆形部和第二圆形部给定的最小半径和最大半径,对所述医学影像图片进行霍夫变换圆形检测,识别出图片中所有满足圆形特征的点;
41、通过轮廓检测算法对识别出的满足圆形特征的点进行分类,将包含点数最多的一组点,作为检测出的半圆形上的特征点;
42、对所述医学影像图片进行边缘检测,再利用霍夫变换对边缘检测后获得的图像进行线段检测,得到检测出的直线;
43、计算所述检测出的直线的两个端点的坐标,将与半圆形上的特征点距离最小的端点作为线段特征点;
44、将检测得到的8个半圆形特征点和1个线段特征点组成的9个特征点的坐标数据作为待标定数据组,所述8个半圆形特征点为所述四个半圆形的8个端点。
45、进一步的,所述标定模块被进一步配置为:
46、根据以往的医学影像图片经手工配准的9个特征点坐标数据制作为第一模板;所述9个特征点为构成第一圆形部和第二圆形部的四个半圆形的8个端点特征点和1个线段特征点;
47、根据所述第一模板计算9个特征点两两之间的欧氏距离,将每个特征点与其它8个特征点之间的欧氏距离划分为一组,共形成9组数据,将该9组数据作为第二模板。
48、进一步的,所述标定模块被进一步配置为:
49、计算所述待标定数据组中9个特征点的几何中心p0;
50、选取9个特征点中的一个点记为pi,其中i=1,2,…,9,计算该点pi与其它点pm之间的欧式距离,其中m=1,...,i,...,9并且m≠i,将得到的8个欧式距离按数值大小降序排列为pi1,pi2,…,pi9;
51、计算9个特征点对应的9组几何特征矩阵,每个点pi的几何特征矩阵可表示为:
52、其中,pi0表示点pi与几何中心p0之间的欧式距离;
53、将计算得到的9组几何特征矩阵依次与所述第二模板的每组数据进行一对一比较,计算出每组几何特征矩阵和第二模板每组数据之间的欧式距离,对计算出的每组欧式距离求和,将结果作为该医学影像图片的特征点和所述第二模板之间的匹配误差;
54、依次遍历所有候选第二模板,得到所有候选第二模板和该医学影像图片的特征点之间的匹配误差,选取匹配误差最小的第二模板作为匹配模板;
55、将该匹配模板对应的手工配准的特征点排序,作为所述待标定数据组的排序。
56、进一步的,还包括预处理模块,被配置为将医学影像图片转换为灰度图像,对灰度图像进行形态学开运算,以消除噪声。
57、本发明提供的一种手术导航标尺的导航配准方法及装置,能够对双圆环特征点进行高效准确的标定和排序,从而提高手术导航的精确性、简化操作流程,减少手术风险。
- 还没有人留言评论。精彩留言会获得点赞!