一种基于任务导向训练的上肢康复路径规划方法
本发明涉及上肢康复机器人路径规划领域,特别涉及一种基于任务导向训练的上肢康复路径规划方法。
背景技术:
1、近年来,因脑损伤的引发身体患侧运动功能障碍或瘫痪等的脑卒中患者数量持续增加且越来越呈现年轻化趋势。康复训练是脑卒中患者康复过程的重要组成部分,患者通过康复训练为受损功能提供重复训练以实现大脑的神经可塑性,传统康复训练主要由康复医师辅助患者进行,传统康复治疗手段在个性化程度、重复性和持续性、主观性和主动性、评估和监控以及信息共享方面存在一些缺点和不足,使用基于任务导向的康复机器人进行训练对不同的患者进行个性化定制,允许以更多样性的方式进行训练,增加患者的积极性,实现主动地康复。与传统康复机器人相比,考虑康复医学规律和康复进程变化的康复训练方法可以提高康复训练效率,保证上肢康复训练的有效性和舒适性,显著改善脑卒中患者恢复正常的生活质量。
2、目前,关于路径规划的主要研究方法包括:人工势场法、人体姿态估计和遗传算法等,人工势场法可能会陷入局部最优,效率和路径的平滑性不高,遗传算法局部搜索能力不强,运行速度较慢,参数选择依靠经验,人体姿态估计可以更方便地规划上肢康复机器人的仿生运动轨迹,但是未考虑患者的实际康复需求和患者的康复进程变化,无法保证患者康复训练的主动性和康复训练效果,因此通过基于任务导向训练的上肢康复运动对患者进行康复训练具有积极的作用。本发明利用光学动作捕捉系统采集人体上肢运动数据,构建人体上肢运动特征输出函数,提出了多关节控制力训练和单关节肌力训练结合的基于任务导向训练的康复训练方法,设计综合康复效果与患者运动保护的约束条件,获得可随患者康复进程变化且满足康复需求的人体上肢最优康复训练轨迹,为患者提供一个安全、舒适且自然的康复训练环境。
技术实现思路
1、本发明公开了一种基于任务导向训练的上肢康复路径规划方法,根据人体上肢运动特征输出函数,结合关节活动度技术,考虑上肢运动时肩关节和肘关节的抖动位移问题,提出了新的康复训练方法,使用结合单关节训练和多关节训练的康复训练方法,实现对患者肌力、肌耐力和控制力的训练,通过在不同阶段下使用不同的训练难度刺激不同肌群的功能性恢复,加快康复训练进程,重塑中枢神经系统对患者上肢的支配与控制;综合康复效果与患者运动保护的约束条件,实现动作复杂度及患者舒适度指标最优,为避免患肢康复训练可能产生的二次损伤提供技术参考。结合说明书附图,本发明的技术方案如下:
2、一种基于任务导向训练的上肢康复路径规划方法,所述路径规划方法具体如下:
3、s1:为实现基于任务导向训练的目的,采集测试者进行康复动作的人体上肢运动数据,寻找上肢运动特征输出;
4、s2:将人体上肢运动数据进行预处理;
5、s3:构建人体上肢运动特征输出函数,结合关节活动度技术设计多关节控制力训练和单关节肌力训练结合的康复训练方法将预处理后的人体上肢运动数据输出为运动特征输出函数;
6、s4:设计复杂度指标和舒适度指标,结合人体工学和康复医学考虑康复医学规律和患者康复进程变化,为患者当前进行的康复训练提供更好康复效果的训练路径;
7、s5:基于综合康复指标,构建归零神经网络模型,对人体运动特征输出函数进行路径优化。
8、步骤s1具体过程为:
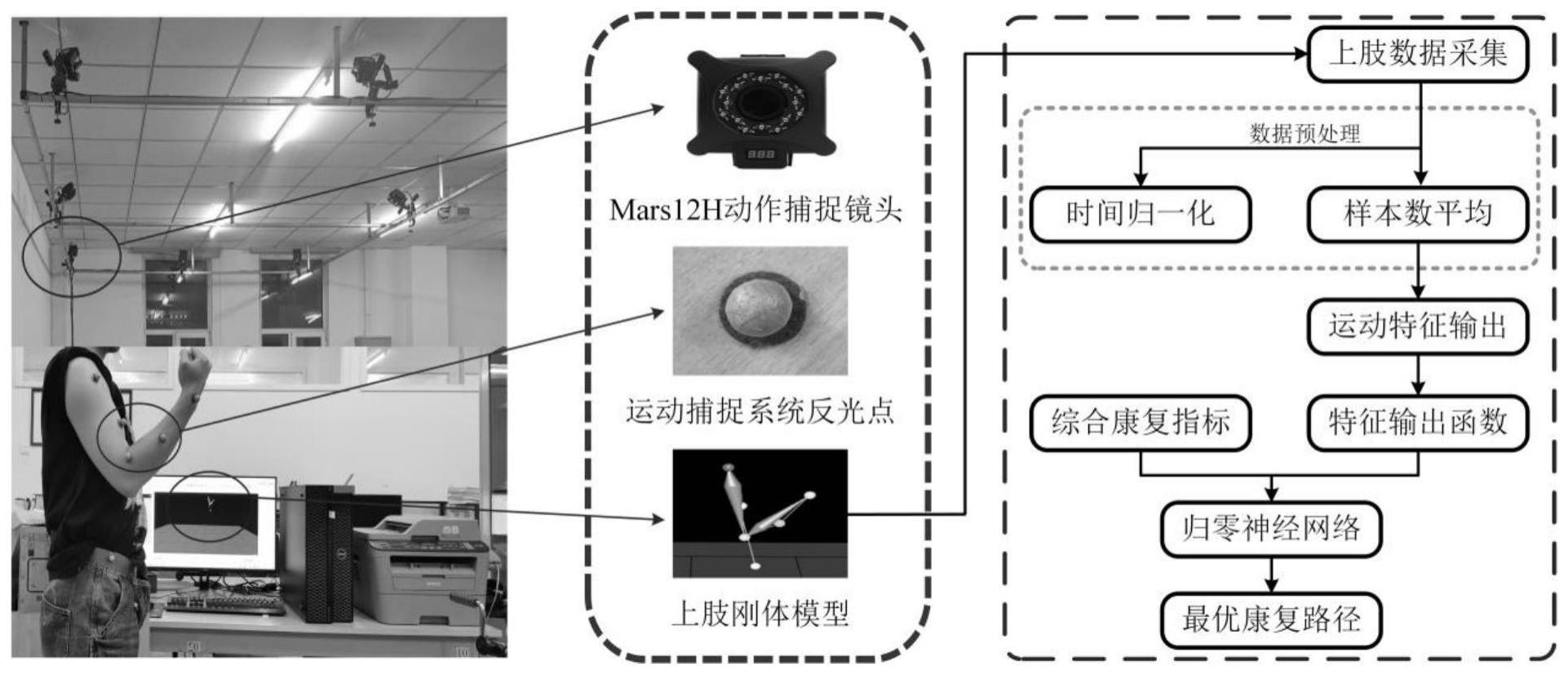
9、本次发明中利用nokov光学三维动作捕捉系统采集人体上肢运动。通过光学三维动作捕捉系统采集受试者身上粘贴的反光点的空间位置、速度和加速度等数据建立上肢刚体模型,获得人体在运动过程中产生的空间位置、关节角度、关节角速度等数据并进行数据预处理。步骤s1具体过程为:
10、s101:使用l型标定杆和t型标定杆构建配置文件;在实验者腰部放置1个反光点,实验者上肢的肩部三角肌中束、上臂肱三头肌、肘部、小臂指伸肌和腕部手舟骨处分别放置的5个反光点;将光学三维动作捕捉设备通过网线端口与计算机连接,并利用与设备相配的seeker度量软件在计算机端进行人体运动数据记录;
11、s102:受试者上肢在矢状面和冠状面分别做周期性肘关节屈曲伸展运动、肩关节屈曲伸展运动和肩关节外展内收运动,利用光学三维动作捕捉系统实时采集反光点的空间位置、速度和加速度等数据建立上肢刚体模型,获得人体上肢在运动中产生的空间轨迹、关节角度、关节角速度等数据;
12、s103:对采集的人体上肢运动数据进行运动学分析,确保运动特征输出之间互斥,且可被时间函数表示,确立肩关节角度和肘关节角度为上肢运动特征输出,使用其运动特征输出可表征人体上肢康复训练的运动特征,重现自然的人体上肢运动。
13、步骤s2具体过程为:
14、经过步骤s1,获取了受试者上肢的空间轨迹、关节角度、角速度和角加速度等运动数据。在进行实验过程中,采集的原始数据仍不能直接用于上肢康复路径规划,因此经过步骤s1将所采集的人体运动数据进行预处理。另外人体上肢每次的运动轨迹和运动速度并不完全相同,所以需要将人体上肢运动数据经过平均化处理,使得其上肢康复运动轨迹具有更好的类人性。步骤s2具体过程为:
15、s201:插值,虽然在实验时布置了8个光学动作捕捉镜头,以便全方位的捕捉人体上肢运动信息,但人体进行上肢康复运动有时会出现反光点被遮挡的现象,有效的上肢周期运动被迫间断,使用插值处理可以使得在周期内产生连续的人体运动数据,每组实验均需完成6个动作周期,以确保数据重复,具有普遍性,如果不能获得连续动作周期的人体运动数据,应放弃该组采集的运动数据,重新进行人体运动数据采集;
16、s202:旋转,将采集的原始数据进行旋转,以确保受试者上肢在x-z平面上进行运动,其中x轴是上肢运动朝向的方向,z轴是垂直于地面的方向,以便将上肢康复运动置于矢状面和冠状面上进行分析。旋转处理通过使用seeker度量软件完成,上肢康复运动的朝向方向即x轴方向,该方向通过患者在进行不同的康复运动时人为确定;
17、s203:归一化,由于受试者每次进行上肢运动时无法保证运动速度完全一致,运动时间存在一定的差异,为便于在后续工作中寻找满足人体上肢运动的特征输出及规范化输出函数,对每组实验数据进行归一化处理,将每次康复运动限制在一个单位时间内,具体数学表达式为:
18、t=t/tm
19、其中,t为归一化后的时间,t为进行该上肢康复运动的当前时刻,tm为进行该上肢康复运动的总时间。
20、s204:平均,由于单次运动数据采集实验具有偶然性,可能会导致受试者在某些情况下表现出与平时不同的运动模式。因此,为了保证实验结果的准确性,需要进行多次实验并对实验轨迹进行平均处理,以获得更加稳定和可靠的数据。这样可以最大程度地减少实验误差,并确保所采集的数据具有较高的普适性和可靠性。为了使受试者在所有的实验中以相同的速度完成训练任务,通过归一化匹配实时的人体运动数据,以便在进行平均之前使实验动作周期相匹配。通过人体的运动数据获得上肢康复运动特征输出和特征输出函数,具体数学表达式为:
21、
22、其中,n表示重复实验的次数,qi表示第i组实验时的关节角度,q表示处理后的平均关节角度。
23、步骤s3具体过程为:
24、构建人体上肢运动特征输出函数,考虑被动关节的位移问题,结合关节活动度技术将基于任务导向的康复训练设计为单关节肌力训练和多关节控制力训练,将s2中预处理后的人体上肢运动数据输出为运动特征输出函数。
25、s301:基于光学动作捕捉系统采集人体运动的离散数据,将s2中预处理后的人体上肢运动数据通过fourier函数拟合人体运动特征输出θ1和θ2。
26、基于任务导向训练的上肢运动特征输出函数具体为:
27、θi(t)=a0+a1cos(wt)+b1sin(wt)+a2cos(2wt)+b2sin(2wt)i=1,2
28、其中,θi表示关节角度,θ1为肩关节夹角,θ2为肘关节夹角,a0、a1、a2、b1和b2分别为拟合函数的系数,ω为上肢康复运动的速度,通过调整参数ω可以调节上肢康复运动的速度,a0为t=0时θ(0)决定的参数,为上肢康复运动的起始关节角度,t为单位时间内当前上肢康复运动进行的时间,通过调节系数a0,a1,a2,b1,b2选择不同阶段下的康复训练任务,通过调节参数ω选择更为合适和期望的训练速度,实现基于任务导向训练的目的。人体运动数据和输出函数之间具有极好的一致性表示,运动特征输出函数可准确地描述了所考虑的人体上肢运动输出数据,重现自然的人体上肢康复运动。
29、s302:当肌力不足时,考虑主动关节进行运动过程中被动关节存在代偿从而发生位移的问题,通过将被动关节活动度运动阶段、主动-助力关节活动度运动阶段和主动关节活动度运动阶段分别进行单关节活动度运动和多关节活动度运动,两种运动路径在三个康复阶段交替式进行,分别进行单关节肌力训练和多关节控制力训练,通过增加康复训练的选择性提高患者在进行康复训练时的主动性和有效性,提高康复训练效率。
30、多关节训练时,通过调节参数a0、a1、a2、b1和b2选择不同动作的康复训练任务,同时调节系数ω选择合适和期望的训练速度,单关节训练时,调节主动关节的参数a0、a1、a2、b1和b2选择不同动作的康复训练任务,通过调节系数ω选择合适和期望的训练速度,实现控制力训练。调节被动关节的参数a0选择不同动作的康复训练任务,将被动关节的参数a1、a2、b1和b2置于0,固定被动关节使其不产生位移代偿,实现肌力训练。
31、步骤s4的具体过程为:
32、经过步骤s3可计算得到单关节训练和多关节训练的上肢运动特征输出函数,结合人体工学和康复医学考虑康复医学规律和患者康复进程变化,设计复杂度指标和舒适度指标,在保证患者安全的前提下最大程度上提高康复训练的有效性。
33、s401:在不同康复阶段,不同程度的灵活度高且复杂度大的运动有助于肢体的协调性训练和加快关节活动度的恢复,在二维平面下的触点运动基于fitts定律定义上肢康复路径规划的复杂度指标如下:
34、
35、其中j1是康复训练运动轨迹的复杂度指标,θiw是上肢进行触点运动的目标范围,θi是上肢运动时肩关节和肘关节关节的关节角度,θiw的范围越小,患者对肌肉的控制力要求越高,完成任务的难度值越大。
36、s402:复杂度是保证康复训练效果的重要指标,但对患者而言,还需同时考虑患者完成康复训练时的舒适度和安全性。患者在进行上肢康复训练时,对肌无力患者而言,重力发挥重要作用,双手自然垂落即肩关节角度与肘关节角度接近于0,此时患者无需使用上肢部分的肌肉力量克服重力即可维持动作,相比于其他抵抗重力运动时最为舒适。在上肢进行康复训练过程中,患者需调整肌肉力量完成指定动作,该动作所需的关节角度越大,对肌力和肌耐力的要求越高,患者进行康复训练的舒适度越低。本文引入舒适度指标,舒适度是指在不对患者造成危害和疼痛的前提下,使得康复训练轨迹尽可能的拟合上肢轨迹,保证患者在康复过程中能安全有效的完成训练任务,舒适度指标如下:
37、j2=2cos(θi)
38、其中j2是康复训练运动轨迹的舒适度指标,θi是上肢运动时的关节角度。
39、s403:将综合康复指标结合上肢康复训练的规范化输出函数,使上肢康复训练的路径轨迹优化问题转化为时变非线性约束优化问题:
40、
41、
42、其中,j为综合康复指标,为肘关节或肩关节的原始关节角度,c为康复路径的优化范围,c为常数,应注意,该范围不能超过该关节的关节活动度,否则易对患者造成伤害。λ1为复杂度康复指标的权重系数,λ2为舒适度康复指标的权重系数,可根据调整λ1和λ2获得侧重训练效果或侧重舒适度的最优康复训练路径。
43、选择不同权重系数的综合康复指标获得的最优路径也不同,当设置λ1较大,λ2较小时,为使综合康复指标更大,需使得康复训练路径中的运动特征输出的角度增大至综合康复指标最大值,随着活动范围增大,动作完成的难易程度增加,在保证一定舒适度的前提下最大程度上刺激患侧肌肉,激发自身潜在的运动能力,使肌肉得到充分的锻炼,高效地完成康复训练任务。当设置λ1较小,λ2较大时,为使得综合康复指标更大,训练路径中的运动特征输出的最大角度逐渐减小,活动范围减小,动作完成较为容易,适合不同康复阶段的初期训练任务。
44、步骤s5的具体过程为:
45、基于综合康复指标,构建归零神经网络模型,求解时变非线性约束优化问题,对人体运动特征输出函数进行路径优化;
46、s501:基于人体工学和康复医学所设计的综合康复指标如下:
47、
48、
49、通过在不等式约束条件下增加一个时变松弛变量δ1(t)和δ2(t),将不等式约束时变非线性优化问题转化为等式约束时变非线性优化问题:
50、
51、
52、s502:定义拉格朗日函数如下:
53、
54、结合karush-kuhn-tucker(kkt)条件,有
55、
56、
57、
58、
59、
60、令y(t)=(θ(t),ρ1(t),ρ2(t),δ1(t),δ2(t))t,以上方程组可以改写为
61、f(y(t),t)=0∈rm+n+2p
62、其中,用非线性映射算子f(·)表示上式的左侧,可得:
63、
64、
65、
66、
67、
68、有
69、
70、s503:令
71、e(t)=ω(t)y(t)-μ(t)
72、通过定义时变误差函数e(t)=-f(y(t),t),构造如下归零神经动力系统(zeroingneural dynamic model,zndm):
73、
74、其中,γ(γ>0)为可调参数,将e(t)=ω(t)y(t)-μ(t)代入zndm中得:
75、
76、从而,转化为
77、
78、由于ω(t)矩阵非奇异,将上式进一步转化为如下表达式:
79、
80、其中,λ(0<λ<1)为可调参数,y(t)从给定的初始条件出发,表示归零神经网络的参数状态以及与理论解y*(t)相对应的输出,其前n个元素构成θ*(t)到时变非线性约束优化问题的最优解θi(t)。可调参数的引入主要用于适应于患者当前的康复进程,采用归零神经网络求解时变非线性约束优化问题获得最终的人体上肢规范化输出函数,基于任务导向训练的人体上肢规范化输出函数可有效提高康复训练效率,保证上肢康复训练的有效性和舒适性。
81、本发明公开了一种基于任务导向训练的上肢康复路径规划方法,基于人体上肢运动特征输出函数,结合关节活动度技术,考虑上肢运动时肩关节和肘关节的抖动位移问题,提出了新的康复训练方法,使用结合单关节训练和多关节训练的康复训练方法,实现对患者肌力、肌耐力和控制力的训练,通过在不同阶段下使用不同的训练难度刺激不同肌群的功能性恢复,加快康复训练进程,重塑中枢神经系统对患者上肢的支配与控制。综合康复效果与患者运动保护的约束条件,满足动作复杂度及患者舒适度指标最优,获得满足康复需求的最优人体上肢康复训练轨迹,为患者提供一个安全、舒适且自然的康复训练环境,并对避免患肢康复训练可能产生的二次损伤提供技术参考。
- 还没有人留言评论。精彩留言会获得点赞!