外磁场驱动的胶囊型活检机器人
本发明涉及外磁场驱动的胶囊型活检机器人,属于微型医疗机器人。
背景技术:
1、自胶囊内窥镜机器人问世以来,其在胃肠道检查和治疗领域占据了十分重要的份额。工作原理是病人口服吞咽胶囊机器人进入消化道,胶囊机器人通过内部的内窥镜进行图像采集并通过无线传输模块将图像信息传送到pc端,医师在pc端观察胶囊机器人传回的图像,从而对胃肠道疾病进行检查和辅助治疗。
2、胶囊内窥镜机器人具有检查容易、无创伤、无交叉感染、操作简单的优点,它同时可增大视野范围。作为胃肠道检查和治疗领域的新兴方法,胶囊内窥镜机器人有着光明的发展前景,成为内窥镜诊疗领域的重要研究方向。
3、目前大多数商用胶囊机器人如以色列given imaging公司研发的pillcam sb,pillcam eso和pillcam colon胶囊内窥镜以及韩国intromedic公司研发的mirocam sb胶囊内窥镜等,在肠胃道中不能进行主动运动,需要借助人体消化道本身的蠕动改变位置。由于无法控制胶囊内窥镜机器人的运动,不仅会造成漏诊的情况,还无法实现对感兴趣部位的长期观察。另外由于胶囊运动的被动性,检查时间可能需要8-16个小时,最终随粪便排出体外。其排出时间还与个人肠道生理状态有关。少数商用机器人如重庆金山科技集团研发的omom胶囊机器人可实现自主运动,但是其功能单一,仅具有图像采集功能。在许多临床应用场景中,仅依靠采集到的图像医生难以确诊病情,尤其有些病情图像特征十分相似,这会给医生的判断带来干扰。当医生无法确诊病情时,还需要额外进行活检手术取活体组织进行体外详细化验,二次活检无疑给患者带来不便和痛苦。
技术实现思路
1、针对现有胶囊内窥镜机器人只能进行图像采集,无法进行组织采样的问题,本发明提供一种外磁场驱动的胶囊型活检机器人。
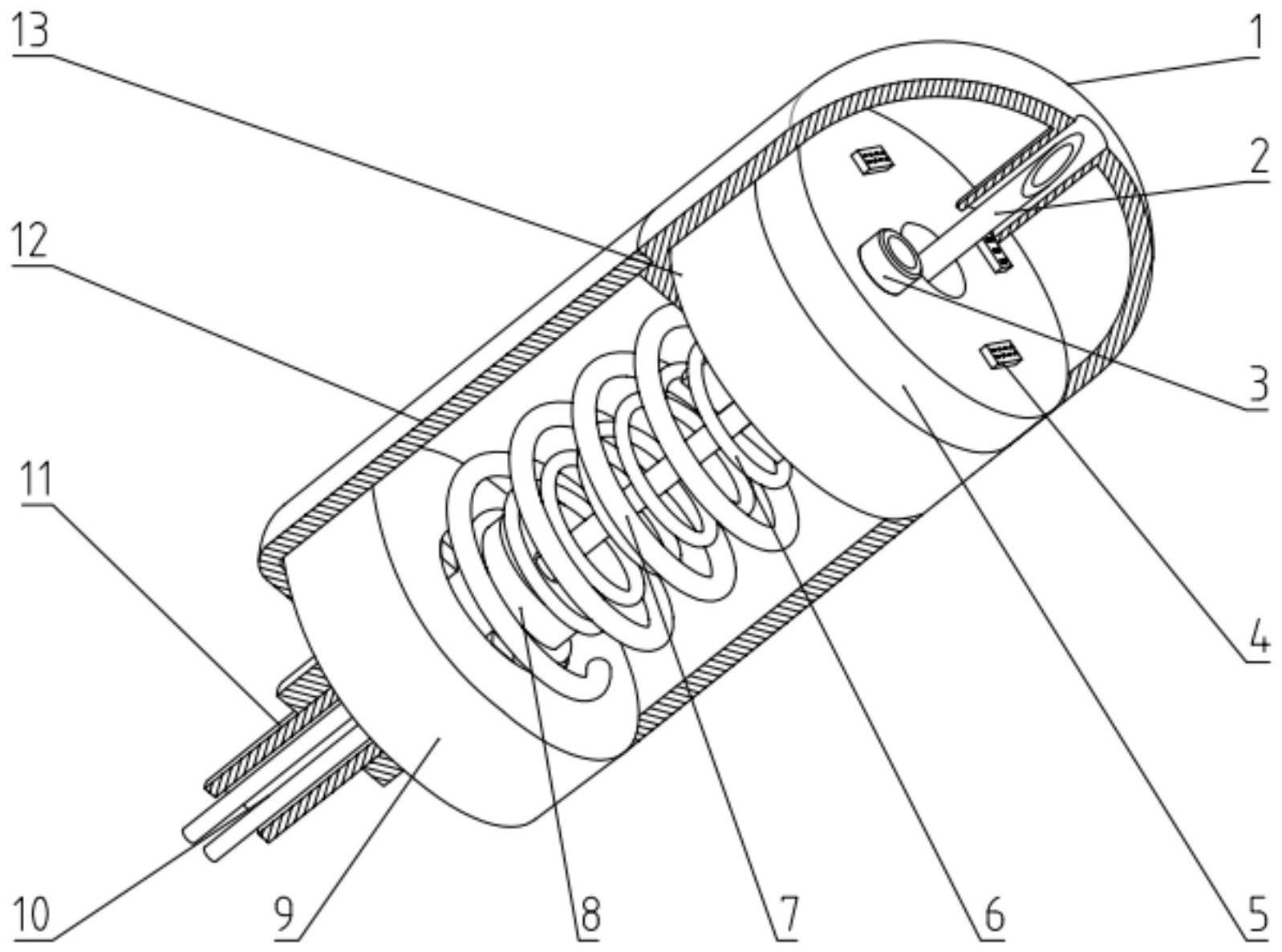
2、本发明的一种外磁场驱动的胶囊型活检机器人,包括机器人本体和外磁场模块,所述机器人本体包括壳体、图像采集模块、活检模块和内磁驱模块,
3、活检模块和内磁驱模块设置在壳体的内腔,外磁场模块设置在壳体外部;内磁驱模块和外磁场模块在相互配合作用下,带动机器人本体实现沿壳体轴向的移动和沿壳体圆周向的转动或摆动,并通过活检模块实现对活检体内组织的拾取;
4、图像采集模块设置在壳体内部,对应于活检模块的执行前端,用于体内组织图像的采集。
5、根据本发明的外磁场驱动的胶囊型活检机器人,所述壳体包括圆筒状前端盖和柱状后端盖,圆筒状前端盖和柱状后端盖连接形成后端盖内腔,圆筒状前端盖的首端中心具有前端盖通孔,圆筒状前端盖的筒壁沿前端盖通孔向内部延伸形成活检针前端导向通道;圆筒状前端盖的末端具有筒底,筒底中心具有与活检针导向通道对应的筒底通孔,并且筒底外表面沿筒底通孔外围设置环形凸台;
6、柱状后端盖的首端与圆筒状前端盖的侧壁连接形成后端盖内腔,末端底部中心具有向外延伸形成的末端导向通道;后端盖内腔用于固定活检模块。
7、根据本发明的外磁场驱动的胶囊型活检机器人,所述内磁驱模块包括壳体定位环形永磁体和转动驱动环形永磁体,
8、转动驱动环形永磁体处于柱状后端盖的末端底部,壳体定位环形永磁体处于圆筒状前端盖的筒底处。
9、根据本发明的外磁场驱动的胶囊型活检机器人,所述活检模块包括活检针、形状记忆合金弹簧、复位弹簧和针座,
10、活检针的尾端与针座过盈配合固定,针座的外表面与转动驱动环形永磁体的内环过盈配合固定;
11、形状记忆合金弹簧的一端与针座的一端连接,另一端固定在圆筒状前端盖的环形凸台上;
12、形状记忆合金弹簧外围同轴套接复位弹簧,复位弹簧的一端作用于圆筒状前端盖底部,另一端作用于转动驱动环形永磁体的对应端面;
13、活检针的首端穿过形状记忆合金弹簧、圆筒状前端盖的筒底和壳体定位环形永磁体,伸入活检针前端导向通道。
14、根据本发明的外磁场驱动的胶囊型活检机器人,还包括导线和硅胶软管,
15、硅胶软管设置在末端导向通道内,硅胶软管内设置导线,导线的两端对应连接形状记忆合金弹簧的两端,用于对形状记忆合金弹簧进行电加热。
16、根据本发明的外磁场驱动的胶囊型活检机器人,采用导线对形状记忆合金弹簧进行加热,使形状记忆合金弹簧的初始状态为预压缩状态,此时活检针伸出圆筒状前端盖;然后使导线停止对形状记忆合金弹簧进行加热,通过复位弹簧使形状记忆合金弹簧恢复伸长状态,带动活检针收回至圆筒状前端盖内。
17、根据本发明的外磁场驱动的胶囊型活检机器人,转动驱动环形永磁体沿圆周方向等分为两段,一段充磁为n极,另一段充磁为s极;外磁场模块在壳体外部沿对应转动驱动环形永磁体的圆周方向摆动,通过与转动驱动环形永磁体的磁扭矩作用,使转动驱动环形永磁体沿预期方向转动或摆动,并带动机器人本体转动或摆动;
18、外磁场模块在壳体外部沿机器人本体轴向方向移动,通过与转动驱动环形永磁体相吸,使转动驱动环形永磁体沿预期方向受磁力,并带动机器人本体移动;
19、壳体定位环形永磁体沿轴向充磁,在形状记忆合金弹簧的预压缩状态,通过与圆筒状前端盖前方轴向设置的外磁场模块相吸,实现壳体的定位。
20、根据本发明的外磁场驱动的胶囊型活检机器人,图像采集模块包括电路板和微型相机,电路板固定在壳体定位环形永磁体的上端面,电路板的上表面设置微型相机,电路板为微型相机提供供电电源;圆筒状前端盖采用透明材料制成。
21、根据本发明的外磁场驱动的胶囊型活检机器人,图像采集模块还包括led灯,led灯设置在电路板的上表面并由电路板提供供电电源。
22、根据本发明的外磁场驱动的胶囊型活检机器人,外磁场模块包括圆柱形永磁体,圆柱形永磁体沿轴向充磁;
23、外磁场模块通过移动装置带动实现与内磁驱模块对应的位置变换。
24、本发明的有益效果:本发明提供了一种医疗设备,可借助本发明所述胶囊型活检机器人进行胃肠道疾病诊断。本发明装置具备主动运动能力,并可在进行图像采集的同时,进行活检体内组织的采样。
25、本发明所述机器人通过外部磁场的控制而具备主动运动的能力;同现有胶囊机器人相比,本发明通过图像采集模块和活检模块配合,不仅能够实时获取胃肠道图像,还可以直接对活体组织进行取样。可简化对人体组织的操作流程,实现了医疗设备的集成化。
技术特征:
1.一种外磁场驱动的胶囊型活检机器人,其特征在于包括机器人本体和外磁场模块,所述机器人本体包括壳体、图像采集模块、活检模块和内磁驱模块,
2.根据权利要求1所述的外磁场驱动的胶囊型活检机器人,其特征在于,
3.根据权利要求2所述的外磁场驱动的胶囊型活检机器人,其特征在于,
4.根据权利要求3所述的外磁场驱动的胶囊型活检机器人,其特征在于,
5.根据权利要求4所述的外磁场驱动的胶囊型活检机器人,其特征在于,
6.根据权利要求5所述的外磁场驱动的胶囊型活检机器人,其特征在于,
7.根据权利要求6所述的外磁场驱动的胶囊型活检机器人,其特征在于,
8.根据权利要求7所述的外磁场驱动的胶囊型活检机器人,其特征在于,
9.根据权利要求8所述的外磁场驱动的胶囊型活检机器人,其特征在于,
10.根据权利要求9所述的外磁场驱动的胶囊型活检机器人,其特征在于,
技术总结
一种外磁场驱动的胶囊型活检机器人,属于微型医疗机器人技术领域。本发明针对现有胶囊内窥镜机器人只能进行图像采集,无法进行组织采样的问题。包括机器人本体和外磁场模块,所述机器人本体包括壳体、图像采集模块、活检模块和内磁驱模块,活检模块和内磁驱模块设置在壳体的内腔,外磁场模块设置在壳体外部;内磁驱模块和外磁场模块在相互配合作用下,带动机器人本体实现沿壳体轴向的移动和沿壳体圆周向的转动或摆动,并通过活检模块实现对活检体内组织的拾取;图像采集模块设置在壳体内部,对应于活检模块的执行前端,用于体内组织图像的采集。本发明作为一种胶囊型机器人。
技术研发人员:张号,谢晖,罗克顶,王飞皓,孟祥和
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!