基于姿态传感器的多模式感觉测试方法及系统与流程
本公开涉及传感器,尤其涉及一种基于姿态传感器的多模式感觉测试方法及系统。
背景技术:
1、现有的人体深感觉测试设备如膝部深感觉测试设备,使用时将该设备绑缚在膝部,在关节位置有一个角度仪,测试时可以将角度仪拨到不同角度并固定,通过此功能达成对膝关节深感觉的测试。该设备存在的问题是在佩戴时需要绑缚4条固定条,非常繁琐。由于要固定牢靠,导致了腿部非常不适。并且由于人体肌肉的可伸缩性,使得其即使通过角度仪固定的角度误差非常大,从而导致测试数据的失准失去测试意义。
技术实现思路
1、本公开实施例提供一种基于姿态传感器的多模式感觉测试方法及系统,能够至少解决现有技术中部分问题,也即解决现有感觉测试设备用户体验不佳,且测量误差较大的问题。
2、本公开实施例的第一方面,
3、提供一种基于姿态传感器的多模式感觉测试方法,所述方法应用于基于姿态传感器的多模式感觉测试系统,所述系统包括穿戴式传感器和非接触式传感器,所述方法包括:
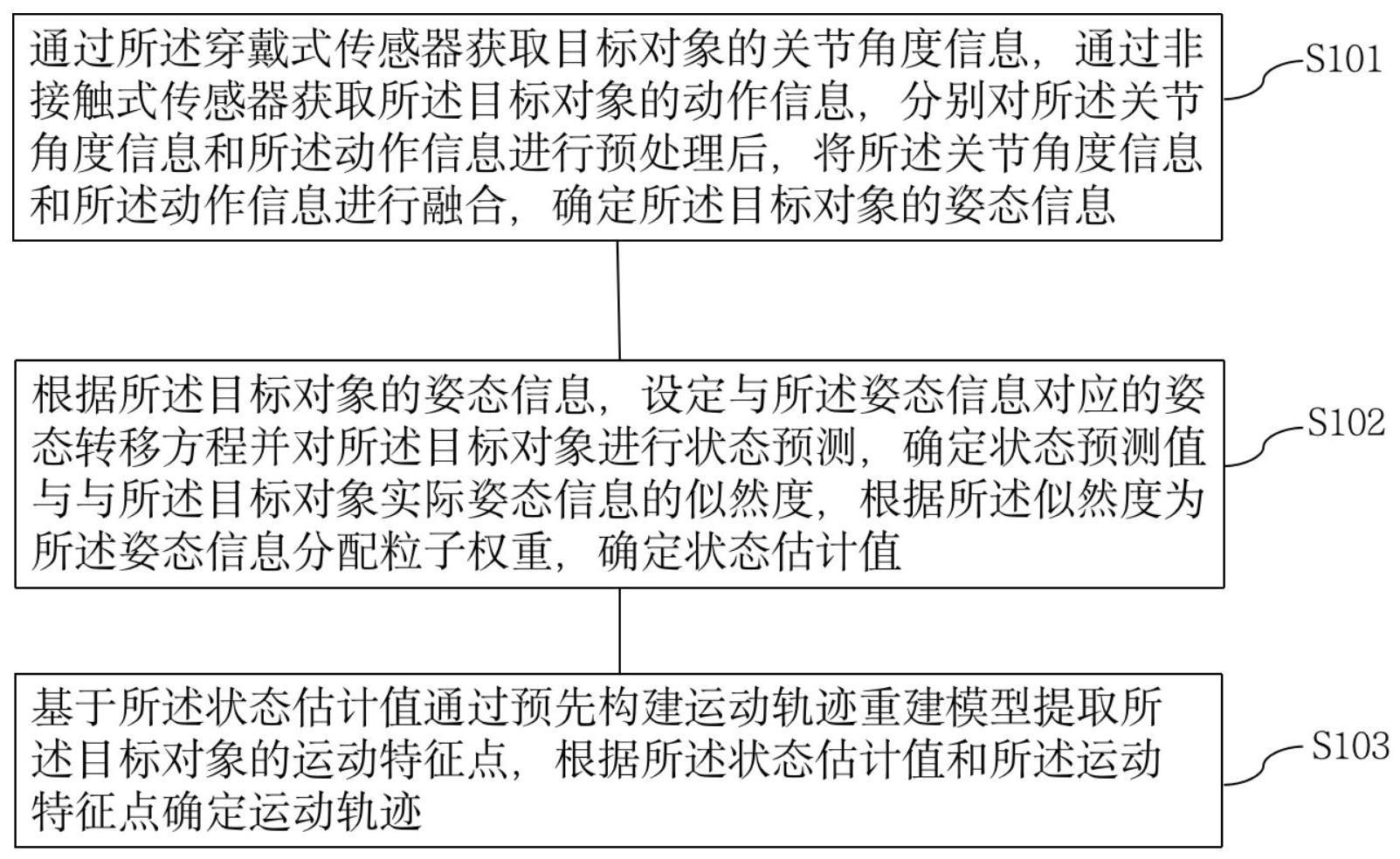
4、通过所述穿戴式传感器获取目标对象的关节角度信息,通过非接触式传感器获取所述目标对象的动作信息,分别对所述关节角度信息和所述动作信息进行预处理后,将所述关节角度信息和所述动作信息进行融合,确定所述目标对象的姿态信息;
5、根据所述目标对象的姿态信息,设定与所述姿态信息对应的姿态转移方程并对所述目标对象进行状态预测,确定状态预测值与与所述目标对象实际姿态信息的似然度,根据所述似然度为所述姿态信息分配粒子权重,确定状态估计值;
6、基于所述状态估计值通过预先构建运动轨迹重建模型提取所述目标对象的运动特征点,根据所述状态估计值和所述运动特征点确定运动轨迹,其中,所述运动轨迹重建模型基于神经网络构建,用于确定目标对象的运动轨迹。
7、在一种可选的实施方式中,
8、所述将所述关节角度信息和所述动作信息进行融合包括:
9、构建所述动作信息对应的动作状态方程,并计算所述动作状态方程对应的雅可比矩阵,确定所述动作信息对应的动作状态量;
10、基于所述动作状态量以及预先获取的非接触式传感器的第一传感误差值构建所述动作状态量对应的动作状态转移矩阵,基于所述关节角度信息以及预先获取的穿戴式传感器的第二传感误差值构建所述关节角度信息对应的角度状态转移矩阵;
11、基于所述目标对象的测试模式设置与所述测试模式对应的测试观测矩阵;
12、根据所述动作状态转移矩阵、所述角度状态转移矩阵以及所述测试观测矩阵,确定所述目标对象的姿态信息。
13、在一种可选的实施方式中,
14、所述确定所述动作信息对应的动作状态量如下公式所示:
15、
16、
17、w(t+δt)=w(t)+h(θ)·v(t)
18、其中,jw表示雅可比矩阵,θ(t)表示关节角度信息,w(t)表示动作状态量,h(θ)表示姿态估计值,v(t)表示误差值;
19、所述构建所述动作状态量对应的动作状态转移矩阵如下公式所示:
20、x1(k)=f(k-1)x1(k-1)+w(k-1)
21、z1(k)=hx1(k)+v(k)
22、其中,x1(k)表示动作状态转移矩阵,f(k-1)表示状态转移噪声,w(k-1)表示观测噪声;z1(k)表示状态转移矩阵对应的协方差;
23、所述构建所述关节角度信息对应的角度状态转移矩阵如下公式所示:
24、x2(k)=f(k-1)x2(k-1)+w(k-1)
25、z2(k)=hx2(k)+v(k)
26、其中,x2(k)表示动作状态转移矩阵,f(k-1)表示状态转移噪声,w(k-1)表示观测噪声;z2(k)表示状态转移矩阵对应的协方差。
27、在一种可选的实施方式中,
28、所述设定与所述姿态信息对应的姿态转移方程并对所述目标对象进行状态预测,确定状态预测值与与所述目标对象实际姿态信息的似然度,根据所述似然度为所述姿态信息分配粒子权重,确定状态估计值包括:
29、根据所述姿态转移方程,以及所述目标对象在上一时刻的姿态信息以及状态转移误差,对所述目标对象进行状态预测;
30、基于所述似然度为为所述姿态信息分配粒子权重,根据所述粒子权重的大小对所述姿态信息进行重采样,保留粒子权重大于预设权重阈值的姿态信息,并对保留后的姿态信息的粒子权重进行加权平均,确定状态估计值。
31、在一种可选的实施方式中,
32、所述对所述目标对象进行状态预测如下公式所示:
33、yk=f(yk-1,uk-1,wk-1)
34、其中,yk表示状态预测值,yk-1表示上一时刻的状态,uk-1表示上一时刻到当前时刻的控制输入,wk-1表示观测噪声。
35、在一种可选的实施方式中,
36、所述基于所述状态估计值通过预先构建运动轨迹重建模型提取所述目标对象的运动特征点,根据所述状态估计值和所述运动特征点确定运动轨迹包括:
37、根据所提取的所述目标对象的运动特征点,确定所述运动特征点的邻接矩阵,并基于所述运动特征点以及所述邻接矩阵拟合运动模型;
38、计算所述运动特征点与所述运动模型的特征距离,并将所述特征距离小于预设距离阈值的运动特征点作为内点,将所述特征距离大于预设距离阈值的运动特征点作为外点,重复计算所述特征距离,直至所述内点的数量不再变动确定最终运动模型;
39、基于所述最终运动模型通过点云配准算法,得到三维空间中运动轨迹。
40、本公开实施例的第二方面,
41、提供一种基于姿态传感器的多模式感觉测试设系统,包括穿戴式传感器和非接触式传感器,所述系统还包括:
42、第一单元,用于通过所述穿戴式传感器获取目标对象的关节角度信息,通过非接触式传感器获取所述目标对象的动作信息,分别对所述关节角度信息和所述动作信息进行预处理后,将所述关节角度信息和所述动作信息进行融合,确定所述目标对象的姿态信息;
43、第二单元,用于根据所述目标对象的姿态信息,设定与所述姿态信息对应的姿态转移方程并对所述目标对象进行状态预测,确定状态预测值与与所述目标对象实际姿态信息的似然度,根据所述似然度为所述姿态信息分配粒子权重,确定状态估计值;
44、第三单元,用于基于所述状态估计值通过预先构建运动轨迹重建模型提取所述目标对象的运动特征点,根据所述状态估计值和所述运动特征点确定运动轨迹,其中,所述运动轨迹重建模型基于神经网络构建,用于确定目标对象的运动轨迹。
45、本公开实施例的第三方面,
46、提供一种基于姿态传感器的多模式感觉测试设备,包括:
47、处理器;
48、用于存储处理器可执行指令的存储器;
49、其中,所述处理器被配置为调用所述存储器存储的指令,以执行前述所述的方法。
50、本公开实施例的第四方面,
51、提供一种计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现前述所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!