一种可磁控导引的血管介入手术机器人系统的制作方法
本发明属于血管介入手术,具体为一种可磁控导引的血管介入手术机器人系统。
背景技术:
1、血管介入手术能够有效治疗血管疾病,具有创伤小、反应低、恢复快优点,还具有靶向性特点,可使部分不能耐受手术或失去手术机会或耐药患者得到有效治疗,在部分领域已经取代外科手术成为首选治疗方式。血管介入手术按治疗方向主要分为血管内栓塞、狭窄、血管内出血的手术治疗,需要借助各种介入器械以及影像设备方能进行。我国应用血管介入手术治疗方案较晚,近年发展迅速,相关手术治疗水平逐步缩短与国外差距。
2、现有技术中,血管介入手术治疗采用传统介入导丝以及高分子导管器械,手术过程中需采用dsa造影实时观察导丝或导管到达推进的实时位置,并进行检测,无论是患者还是施术医疗工作人员同时长时间暴露在x射线环境中。同时由于人体血路尤其是神经血管通路过于复杂,介入器械推进到目标靶点位置过程时间过长。目前市面较为火热的有血管介入手术机器人,通过推送模块的推送、旋转实现导丝的推进到达指定病灶,该方法可以解放医疗工作人员的现场操作,减少了患者暴露的风险,但该血管介入手术机器人控制仍然依赖dsa频繁的间断造影得到的实时图像信息,在操控台端进行导丝推进介入路径的调整,同时导丝推进操作过度依赖近端推进模块的触觉反馈传感器,由于导丝近端到远端距离较长,力传递距离较长即造成现有触觉反馈延迟器械推进过程中依然容易造成血管壁损伤。dsa造影使用大量的碘类造影剂容易引起患者的肾衰竭等术后并发症,临床上已经屡见不鲜。
技术实现思路
1、本发明的目的在于提供一种可磁控导引的血管介入手术机器人系统,以解决现有的血管介入手术中患者与医疗工作人员同时长时间暴露在x射线环境中,介入器械推进到目标靶点位置过程时间过长,器械推进过程中依然容易造成血管壁损伤的问题。
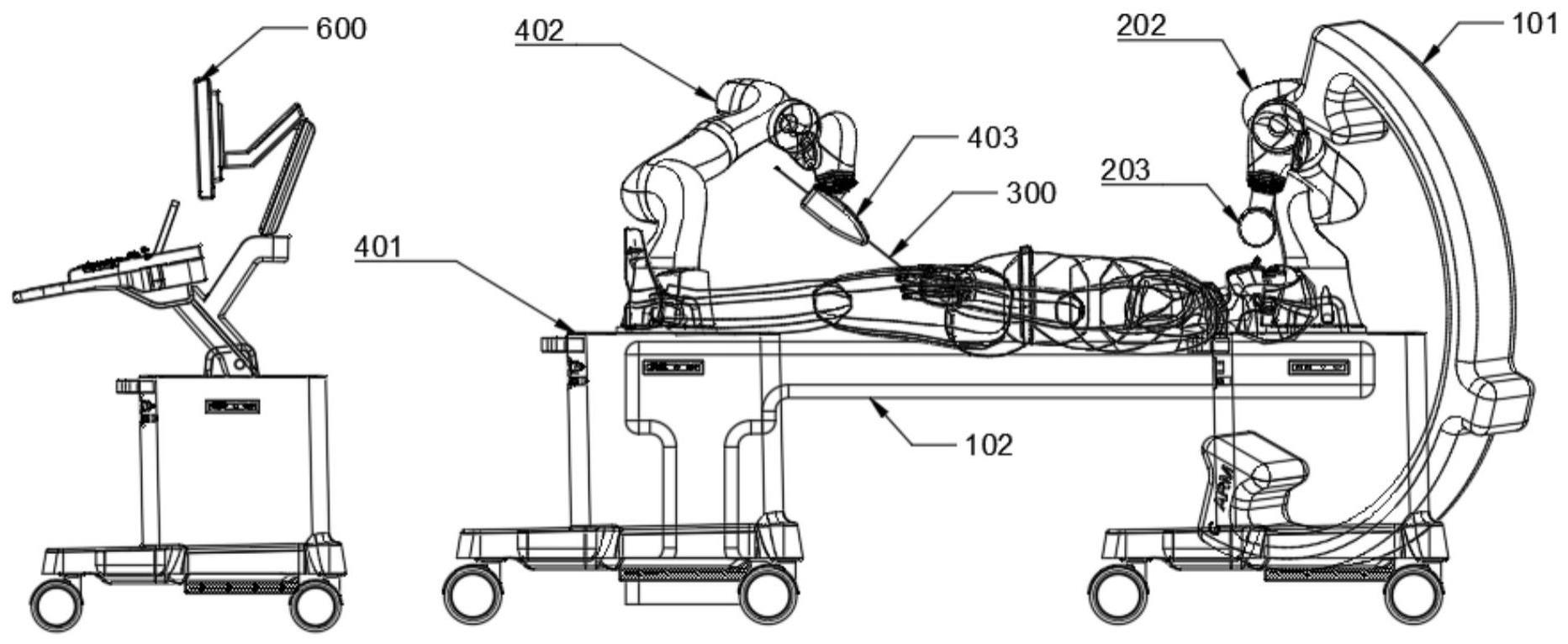
2、为了实现上述目的,本发明提供如下技术方案:一种可磁控导引的血管介入手术机器人系统,包括造影配套电动手术台,所述造影配套电动手术台底部设有c型介入x射线造影系统,且c型介入x射线造影系统设为c型臂,所述造影配套电动手术台一端设有磁控手术机器人模块,所述磁控手术机器人模块输入端电性连接有远程控制终端,所述远程控制终端包括磁控工作台与推进工作台,所述磁控工作台输出端与磁控手术机器人模块输入端电性连接,所述推进工作台输出端电性连接有导丝导管推送介入手术机器人模块,且导丝导管推送介入手术机器人模块设在造影配套电动手术台另一端,所述导丝导管推送介入手术机器人模块通过驱动组件推进磁控导丝。
3、优选的,所述磁控手术机器人模块包括磁控机械臂,所述磁控机械臂一端固定有永磁体,所述磁控手术机器人模块固定在第一四轮定位台车顶部。通过移动第一四轮定位台车将磁控手术机器人模块移动到指定位置,并且通过控制机械臂将永磁体实现多方位摆动,便于控制永磁体的磁场变化。
4、优选的,所述磁控机械臂设为六自由度或七自由度的机械臂,所述永磁体设为圆柱体,且圆柱体直径设为100mm,且永磁体的磁场强度设为1.45t。
5、优选的,所述导丝导管推送介入手术机器人模块包括执行终端,所述执行终端的输出端与驱动组件的传感器输入端电性连接,所述执行终端的输入端与推进工作台的输出端电性连接,所述驱动组件固定在推进机械臂一端,所述推进机械臂另一端固定在第二四轮定位台车顶部。通过推进工作台发出推进指令给驱动组件内的传感器,将磁控导丝推进介入血管内。
6、优选的,所述驱动组件由传感器、导轨、丝杆、齿轮轴、步进电机、齿轮轴、转轮和夹持组件组成,所述夹持组件夹持磁控导丝。驱动组件固定在机械臂执行器终端并供电和必要的信号控制传输。
7、优选的,所述磁控导丝内部设有光纤组件,所述光纤组件包括单模光纤芯,所述单模光纤芯一端设有光纤透镜,所述光纤透镜另一端端面包覆有磁体混合物。光纤组件用来传输及接受反射的光学信号,磁体混合物对磁控机械臂控制永磁体磁场变化产生相应动作响应,磁体混合物由pmds流体与磁粉按1:1比例混合制备而成,经过室温硫化凝固后,使用充磁设备进行充磁,使得导丝远端得到磁性,并在配套永磁体的磁场下进行测试。
8、优选的,所述光纤透镜前端设有多个光滑斜面。光纤透镜端头分为三个斜面,斜面研磨角度与透镜轴心研磨倾斜角度为45°,斜面呈现均匀阵列排列;通过多个光滑斜面对单模光纤反射的光进行折射至外周血管壁并采集发射光。
9、优选的,所述磁控导丝由镍钛合金、铂钨合金、不锈钢等中的一种或多种金属材料组成,所述磁控导丝(300)远端的磁体混合物为硅橡胶、聚氨酯、聚己内酯、热塑性弹性体材料中的一种与铷铁錋磁铁混合制备而成,所述磁控导丝外层设为高分子涂层材料,且高分子涂层材料设为亲水涂层。亲水涂层使得导丝表面对粘附物质的黏附能力降低,减少粘附物质对导丝的阻碍和损害,提高导丝的使用寿命和可靠性。
10、本发明的有益效果如下:
11、本发明中采用光纤组件用来传输及接受反射的光学信号,磁体混合物对磁控机械臂控制永磁体磁场变化产生相应动作响应,磁体混合物由pmds流体与磁粉按比例混合制备而成,经过室温硫化凝固后,使用充磁设备进行充磁,使得导丝远端得到磁性,并在配套永磁体的磁场下进行测试。磁控导丝介入血管内,距离最近侧血管壁距离为l,与水平轴夹角为θ,此时位置图像光学信号反馈传输给远程控制终端进行信号转换图像处理,并分析理论位置应与最近侧血管壁距离为l1,与水平轴夹角应该为θ1,其中心轴与血管中轴夹角α,系统算法基于上述夹角数值、边距距离计算出调整后磁控导丝远端端点p1位置坐标x1,y1,z1,坐标位置信息换算为控制指令坐标给到磁控手术机器人模块,并通过磁控机械臂控制永磁体质心位置及磁场方向,以实现最终对磁控导丝的位置进行及时校正,程序实现可由算法自动校正完成,减少与血管壁的碰撞,相应地,磁控导丝在经过血管路径分叉前有相应血管分叉图像输出,可适当经过x射线造影或超声定位图像进行辅助判断,控制磁控机械臂的位置进而控制磁控导丝转向至目标侧分叉血管,降低了临床不透射线使用的频率以及时长以及手术dsa造影剂的使用,并且具有光学信号反馈识别器械远端与血管壁距离,实现无接触的磁控调弯、无需扭转即可通过外部永磁体磁场进行方向调节。
技术特征:
1.一种可磁控导引的血管介入手术机器人系统,包括造影配套电动手术台(102),所述造影配套电动手术台(102)底部设有c型介入x射线造影系统(100),且c型介入x射线造影系统(100)设为c型臂(101),其特征在于:所述造影配套电动手术台(102)一端设有磁控手术机器人模块(200),所述磁控手术机器人模块(200)输入端电性连接有远程控制终端(600),所述远程控制终端(600)包括磁控工作台与推进工作台,所述磁控工作台输出端与磁控手术机器人模块(200)输入端电性连接,所述推进工作台输出端电性连接有导丝导管推送介入手术机器人模块(400),且导丝导管推送介入手术机器人模块(400)设在造影配套电动手术台(102)另一端,所述导丝导管推送介入手术机器人模块(400)通过驱动组件(403)推进磁控导丝(300)。
2.根据权利要求1所述的一种可磁控导引的血管介入手术机器人系统,其特征在于:所述磁控手术机器人模块(200)包括磁控机械臂(202),所述磁控机械臂(202)一端固定有永磁体(203),所述磁控手术机器人模块(200)固定在第一四轮定位台车(201)顶部。
3.根据权利要求2所述的一种可磁控导引的血管介入手术机器人系统,其特征在于:所述磁控机械臂(202)设为六自由度或七自由度的机械臂,所述永磁体(203)设为圆柱体,且圆柱体直径设为100mm,且永磁体(203)的磁场强度设为1.45t。
4.根据权利要求1所述的一种可磁控导引的血管介入手术机器人系统,其特征在于:所述导丝导管推送介入手术机器人模块(400)包括执行终端,所述执行终端的输出端与驱动组件(403)的传感器输入端电性连接,所述执行终端的输入端与推进工作台的输出端电性连接,所述驱动组件(403)固定在推进机械臂(402)一端,所述推进机械臂(402)另一端固定在第二四轮定位台车(401)顶部。
5.根据权利要求4所述的一种可磁控导引的血管介入手术机器人系统,其特征在于:所述驱动组件(403)由传感器、导轨、丝杆、齿轮轴、步进电机、齿轮轴、转轮和夹持组件组成,所述夹持组件夹持磁控导丝(300)。
6.根据权利要求1所述的一种可磁控导引的血管介入手术机器人系统,其特征在于:所述磁控导丝(300)内部设有光纤组件,所述光纤组件包括单模光纤芯,所述单模光纤芯一端设有光纤透镜,所述光纤透镜另一端端面包覆有磁体混合物。
7.根据权利要求6所述的一种可磁控导引的血管介入手术机器人系统,其特征在于:所述光纤透镜前端设有多个光滑斜面。
8.根据权利要求6所述的一种可磁控导引的血管介入手术机器人系统,其特征在于:所述磁控导丝(300)由镍钛合金、铂钨合金、不锈钢等中的一种或多种金属材料组成,所述磁控导丝(300)远端的磁体混合物为硅橡胶、聚氨酯、聚己内酯、热塑性弹性体材料中的一种与铷铁錋磁铁混合制备而成,所述磁控导丝(300)外层设为高分子涂层材料,且高分子涂层材料设为亲水涂层。
技术总结
本发明属于血管介入手术技术领域,且公开了一种可磁控导引的血管介入手术机器人系统,包括造影配套电动手术台,C型介入X射线造影系统,远程控制终端,磁控手术机器人模块和导丝导管推送介入手术机器人模块,采用光纤组件用来传输及接受反射的光学信号,磁体混合物对磁控机械臂控制永磁体磁场变化产生相应动作响应,磁控导丝介入血管内,将位置图像光学信号反馈传输给远程控制终端进行信号转换图像处理,并分析理论位置与最近侧血管壁距离与水平轴夹角,基于上述夹角数值、边距距离计算出调整后磁控导丝远端端点的位置坐标,最后通过磁控机械臂控制永磁体质心位置及磁场方向,实现最终对磁控导丝的位置进行及时校正,减少与血管壁的碰撞。
技术研发人员:李峥,钟旭飘,周凯旋,赵中
受保护的技术使用者:智驭医疗科技(广州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!