一种基于透射拉曼光谱及两步法扫描拉曼造影剂定位方法
本发明涉及医疗,尤其涉及一种基于透射拉曼光谱及两步法扫描拉曼造影剂定位方法。
背景技术:
1、无创检测体内深部病灶并获得其深度信息,对于临床医学诊断和治疗至关重要。人体的病灶如实体瘤等分布深浅不一,大多数病灶的解剖位置往往较深,从数厘米到十几厘米不等。外科手术是目前治疗恶性实体瘤和清扫转移淋巴结的主要方法。发展高精准的深层检测方法对于外科手术具有重要意义,不仅可以实现术前经皮定位、帮助规划手术减小创口,又能在术中实时引导、发现被掩盖的肉眼不可见的微小病灶,从而彻底切除病灶又尽可能保护正常组织,辅助术周导航,实现精准诊疗。
2、当前,x-ct、pet和mri等多种技术在临床均有了广泛的应用。这些技术能够实现无创深层诊断,但受限于采集时间长、仪器昂贵或辐射剂量大等原因,更常用于初始诊断或术前观察,如在术前三维重建得到解剖或生理信息,为医生手术规划提供参考。但是,病灶的解剖位置可能会随着人体姿势改变或自然生理活动(如胸廓呼吸运动)发生移动,导致术中病灶位置与术前检测结果相比存在偏移,这为基于术前建模的虚拟或电磁术中引导等技术带来困难。因此,当前临床常用的检测手段在术前诊断和术中应用之间的衔接仍存在不足,难以同时实现无创诊断深层病灶与实时引导病灶的手术治疗。
3、表面增强拉曼光谱(surface-enhanced raman spectroscopy,sers)是指由于表面等离激元的激发以及表面化学效应使得吸附在金属纳米结构表面的分子的拉曼散射产生极大增强的效应,可实现单分子和单颗粒检测,具有非常高的灵敏性。通过将拉曼分子吸附在粗糙贵金属颗粒表面,可以制备得到特异性好、灵敏度高的表面增强拉曼光谱探针。基于表面增强拉曼光谱探针(简称拉曼探针)的造影剂不易发生光漂白、不受生物组织自发荧光的干扰、且样品制备简单。此外,其特有的指纹式图谱使其具有超高的特异性,超窄的半宽峰有利于光学编码的多指标检测,且光学稳定性强。基于以上突出的优势,表面增强拉曼探针在生物医学领域具有非常广阔的应用前景。
4、但是,虽然现有的拉曼探针造影剂可以主动或被动地靶向病灶,但是如何确定造影剂在厚组织中的位置是一个挑战。当前研究存在:难以在临床安全激光照射条件下实现高穿透深度、并未解决病灶信号深度溯源,即“测不深”和“测不准”两大挑战。
5、拉曼光谱技术面临的瓶颈之一无法在安全激光照射下实现深层病灶的检测。增加激光功率是提升检测深度的直接方法,但也会导致单位面积中能量释放的速度提升,引起治疗副作用,导致生物组织表面迅速升温引起灼伤。目前几乎所有应用于动物模型的拉曼光谱检测都采用了显著高于mpe的激光光照,特别地,为了提升信噪比,往往采取大幅提高激光功率或延长采集时间的手段。
6、拉曼光谱技术面临的瓶颈之二是如何确定病灶深度。由于深层检测过程中获得的信号包含整个截面的光子信息,不具备纵深分辨率,所测得光谱是组织与颗粒信号的混合光谱。如何从混合光谱中提取颗粒的有效信息并判断信号深度,是亟需解决的问题。以往的透射拉曼光谱研究工作大多数只实现检测颗粒信号就戛然而止,但如果无法通过信号判断颗粒的大致位置,实现检测也仅仅意味着知晓这团厚组织中存在颗粒或病灶,这是远远不够,也无法解决实际临床问题的。
7、因此,本领域的技术人员致力于开发一种基于透射拉曼光谱及两步法扫描拉曼造影剂定位方法。提供一种可以进行深层病灶定位的拉曼光学技术,为临床的肿瘤检测以及定位提供更多选择,并为精准医疗提供新的检测定位方法。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是在安全激光照射下实现深层病灶的检测,确定病灶深度,为临床的肿瘤检测以及定位提供更多选择,并为精准医疗提供新的检测定位方法。
2、为实现上述目的,本发明提供了一种基于透射拉曼光谱及两步法扫描拉曼造影剂定位方法,包括以下步骤:
3、步骤1、将含有拉曼探针造影剂的柱状生物组织样品置于样品台上,采用拉曼光谱仪在横向进行透射检测,即光源从左入射,采用拉曼采集探头在右侧收集拉曼光谱信号;
4、步骤2、沿圆柱体的轴向扫描,即同时调整光源和拉曼采集探头的高度,并且保持处于同一高度以构成透射检测装置,根据扫描结果拟合得到曲线,并取信号强度最大位置为造影剂所在高度位置;
5、步骤3、对于所述步骤2选取的造影剂所在高度的平面进行环形扫描,即保持光源和拉曼采集探头位于对侧构成透射装置,通过同时旋转和拉曼采集探头或者仅旋转样品的方法,检测得到360°各个角度下的拉曼光谱;
6、步骤4、计算所述步骤3所得的拉曼光谱的谱峰比的对数值,并且根据谱峰比对数值-组织厚度的线性关系计算在各角度下造影剂和透射拉曼装置中拉曼采集探头的距离,最后综合所有角度的拉曼光谱,利用误差最小的原则完成造影剂的准确定位。
7、进一步地,所述拉曼探针造影剂包括金纳米颗粒内核、拉曼报告分子中间层、银外壳、表面修饰层。
8、进一步地,所述表面修饰层可以为聚乙二醇层或氧化硅层。
9、进一步地,所述拉曼采集探头置于入射激光的对侧,接收的是透射拉曼光谱信号。
10、进一步地,所述步骤1,光源和样品之间的距离可调,以调整入射激光的直径,并选择大直径光斑以达到安全激光照射剂量。
11、进一步地,所述步骤2,沿圆柱体轴向扫描步长可调整。
12、进一步地,所述步骤2,对于扫描结果采用高斯曲线进行拟合,得到信号最强的位置,对应于造影剂所在的平面。
13、进一步地,所述步骤3,采用圆形转盘作为样品台,旋转柱状生物组织进行透射拉曼信号采集。
14、进一步地,所述步骤3,选择环形扫描的角度间隔,角度间隔的范围包括10度至30度。
15、进一步地,所述谱峰比对数值采用的是单个谱峰对,即两个谱峰的强度的比值取对数的数据。
16、在本发明的较佳实施方式中,本发明开发了一种方法,可以完成厚组织中拉曼造影剂的三维实时定位。本方法结合“两步法”扫描策略,利用采集到的透射拉曼光谱信号,实现了生物组织中拉曼造影剂的三维定位。定位步骤如下:
17、步骤1:将含有拉曼探针造影剂的柱状生物组织样品置于样品台上,采用拉曼光谱仪在横向进行透射检测,即光源从左入射,采用拉曼采集探头在右侧收集拉曼光谱信号。
18、步骤2:沿圆柱体的轴向扫描,即同时调整光源和拉曼采集探头的高度,并且保持两者处于同一高度以构成透射检测装置,根据扫描结果拟合得到曲线,并取信号强度最大位置为造影剂所在高度位置z;
19、步骤3:对于步骤2选取的造影剂所在高度的平面进行环形扫描,即保持光源和拉曼采集探头位于对侧构成透射装置,通过同时旋转光源和拉曼采集探头或者仅旋转样品的方法,检测得到360°各个角度下的拉曼光谱。
20、步骤4:计算步骤3所得的拉曼光谱的谱峰比的对数值,并且根据“谱峰比对数值”-组织厚度的线性关系计算在某角度下造影剂和透射拉曼装置中拉曼采集探头的距离,最后综合所有角度的拉曼光谱,利用误差最小的原则完成造影剂的准确定位。
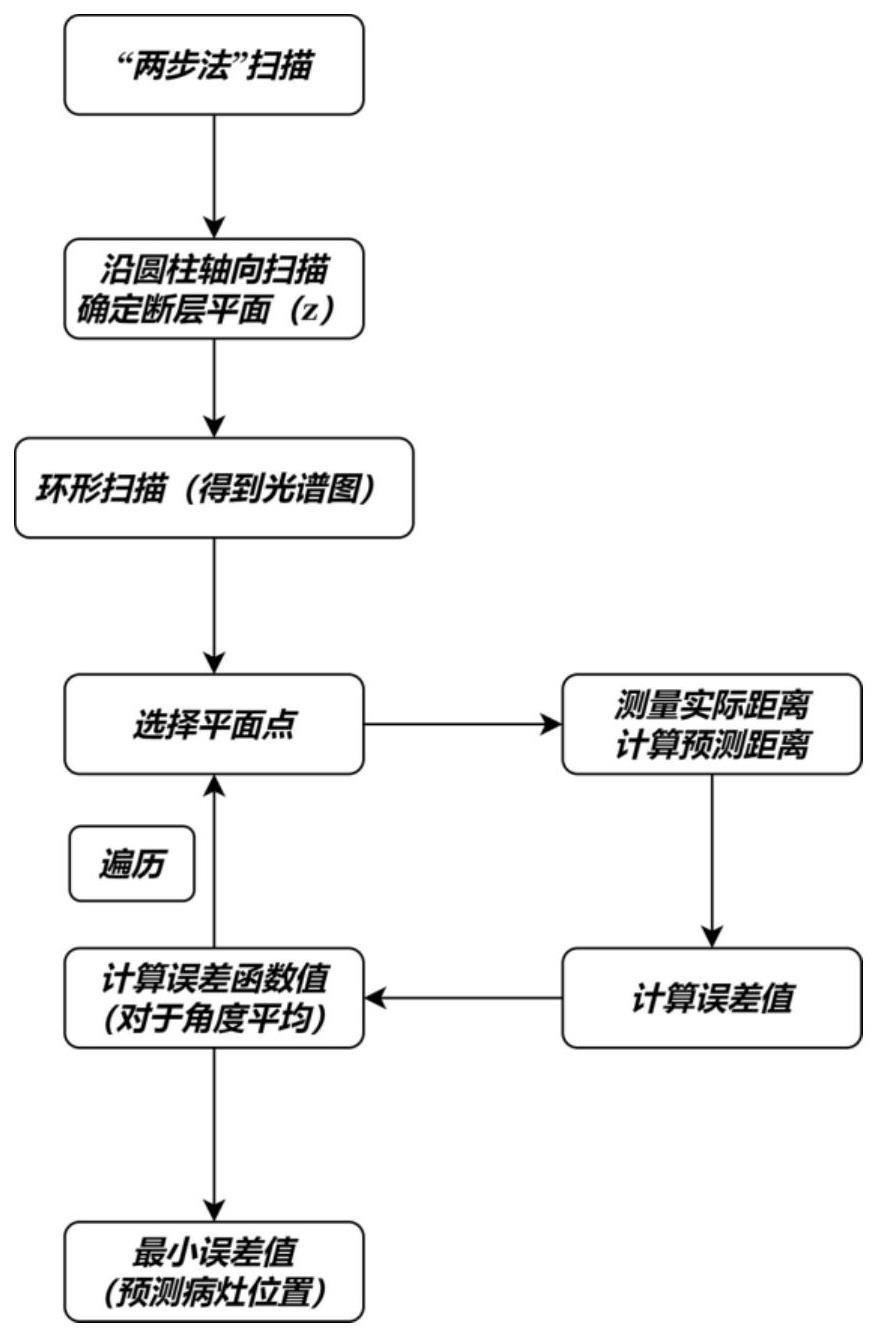
21、当前存在的病灶三维定位或者成像方法,一般采用的是螺旋扫描或者逐层环形扫描的方法,扫描过程较为繁琐。本发明开发了“两步法”扫描策略,仅需通过两步,即沿圆柱组织轴向扫描一次,确定造影剂所在平面,然后对于造影剂所在平面进行环形扫描,即可完成病灶的定位。
22、当前的断层扫描(tomography)方法重建图像,一般是基于信号强度信息,结合滤波反投影等方法完成图像的重构,整体算法较为复杂,需要更长的重建时间。本发明采用了基于“谱峰比对数值”这一包含深度信息的信号,结合最小误差原则,进行病灶位置乃至图像的重构。本发明整体算法较为简单,仅需通过很少的环形扫描角度(对于实施例1,仅需36个扫描角度的数据)就可以完成二维平面(x,y)中的病灶定位
23、当前的拉曼造影剂定位方法,多数只能在很高的激光照射剂量下测量信号,无法实现安全激光剂量下的造影剂定位。本发明采用了大光斑入射的策略,可以通过调整激光和样品之间的间距,让入射的激光光斑面积较大,从而在总入射功率较大的基础上,仍旧满足安全激光照射剂量要求(因为面积大,所以密度小)。光源和样品之间的距离可调,以此调整入射激光的直径,并选择大直径光斑以达到安全激光照射剂量。在实施例1中,本发明选择的入射激光功率为300mw,并选择激光光斑直径为0.5cm,计算得到激光的功率密度为1.528w/cm2,符合安全激光照射剂量。
24、拉曼探针造影剂包括金纳米颗粒内核、拉曼报告分子中间层、银外壳、表面修饰层。
25、表面修饰层可以为聚乙二醇层或氧化硅层。
26、透射检测方法即将所述拉曼采集探头置于入射激光的对侧,接收的是透射拉曼光谱信号。
27、步骤1包括:所述光源和样品之间的距离可调,以此调整入射激光的直径,并选择大直径光斑以达到安全激光照射剂量。
28、步骤2包括:沿圆柱体轴向扫描步长可调整。
29、步骤2还包括:对于扫描结果采用高斯曲线进行拟合,得到信号最强的位置,对应于造影剂所在的平面。
30、步骤3包括:采用圆形转盘作为所述样品台,旋转柱状生物组织进行透射拉曼信号采集。
31、步骤3还包括:选择环形扫描的角度间隔,角度间隔的范围包括10度至30度。
32、步骤4通过使用环形扫描采集得到的光谱数据,通过数据处理得到“谱峰比对数值”,由此得到在角度i下的造影剂距拉曼采集探头预测距离为计算公式为:
33、
34、“谱峰比对数值”采用的是单个谱峰对,即两个谱峰的强度的比值取对数的数据。可以选择不同的拉曼谱峰分析所述的“谱峰比对数值”。
35、步骤4的最小误差的原则如下,设定在在角度i下的造影剂距拉曼采集探头预测距离为对于平面每一点进行误差计算,平面某点距拉曼采集探头实际距离为di,综合所有环形扫描角度的预测结果,平面某点总误差为:利用最小误差原则即:寻找造影剂最有可能的平面位置。
36、本发明与现有技术相比较,具有如下显而易见的实质性特点和显著优点:
37、1.本发明完成了生物组织内拉曼造影剂的精确三维定位,填补了定位厚生物组织中拉曼造影剂这一需求的空白,且达到了很高的精确度,在直径5cm的柱状猪肉组织中定位误差不超过2mm。
38、2.本发明大大节约了扫描需要的步骤,对于生物组织中的造影剂定位,仅需通过沿轴向的扫描,以及环形扫描两步即可完成造影剂的三维定位。
39、3.本发明整体算法较为简单,仅需通过很少的环形扫描角度就可以完成二维平面中的病灶定位。
40、4.本发明符合安全激光照射剂量。
41、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
- 还没有人留言评论。精彩留言会获得点赞!