一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法与流程
本发明属于医疗器械领域,具体地说是一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法。
背景技术:
1、在目前的主动型骨折复位机器人系统研究中,执行复位操作使用的方法是直接将单皮质钉或双皮质钉打入断骨模型的远端皮质,然后由装有螺钉连接件的机械臂或stewart平台夹持螺钉进行移动,从而将机器人的运动传递给断骨模型远端,实现断骨模型远端与近端的复位;
2、然而,在实际长骨骨折治疗手术中,实现骨折复位步骤后需要在髓腔内置入髓内钉用于固定复位状态;使用双皮质螺钉固定断骨远端进行复位操作会使螺钉沿髓腔轴线的垂直方向贯穿髓腔,不仅会使后续的髓内钉置入操作无法进行,还会对患者造成较大的医源性创伤;使用单皮质螺钉固定远端虽然能够保证后续髓内钉置入操作的进行,但由于闭合骨折复位操作允许置入的螺钉直径有限,螺钉与皮质的接触面积小,螺钉置入皮质的深度浅,肌肉组织的质量较大,移动软组织所需的牵拉力大,螺钉在皮质内容易存在应力集中的问题,具有潜在的医源性骨裂和螺钉滑脱的风险;总之,目前使用螺钉持患者患肢进行复位的方法存在局限性,只能应用于去除软组织的断骨模型复位实验,不能应用于临床。
技术实现思路
1、为了解决上述技术问题,本发明提供一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法,以解决现有技术中使用螺钉持患者患肢进行复位的方法存在局限性,只能应用于去除软组织的断骨模型复位实验,不能应用于临床等问题。
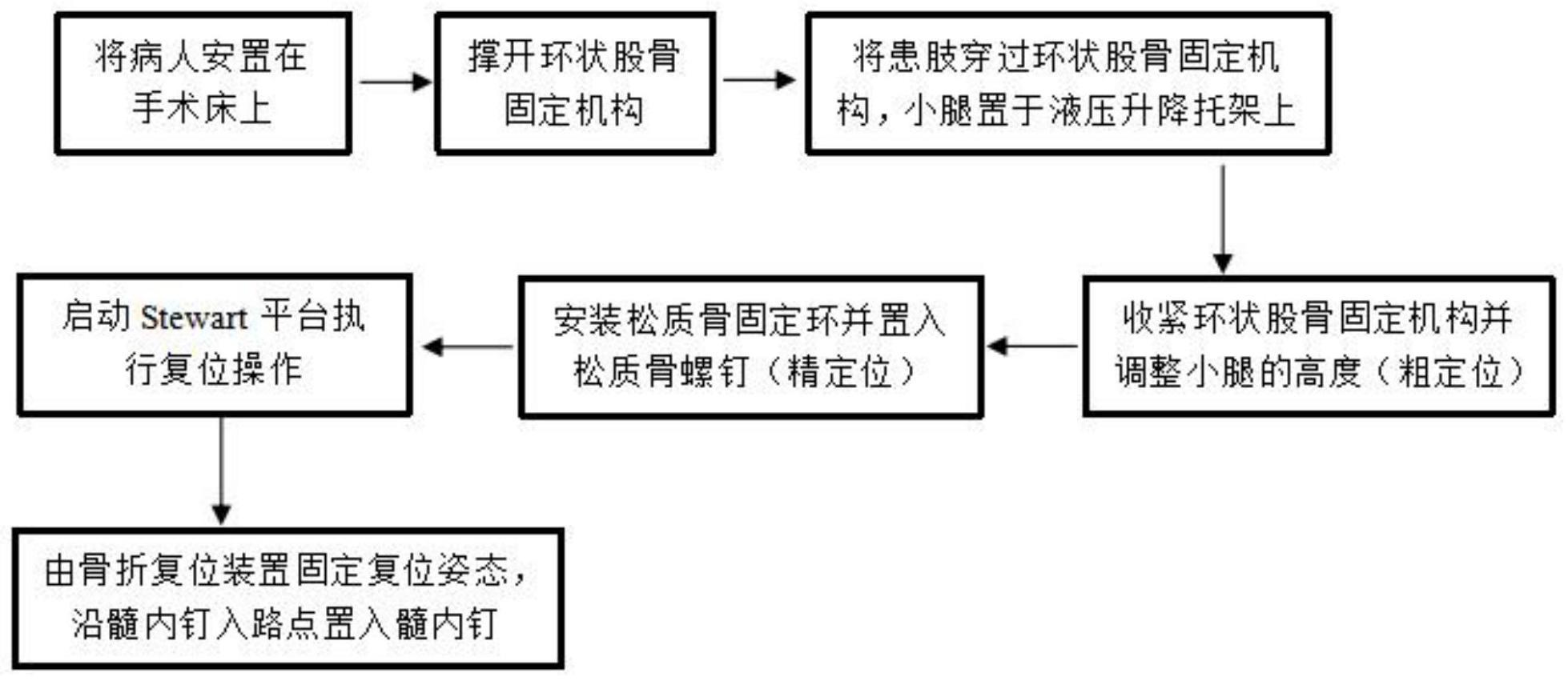
2、一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法,具体步骤如下:
3、s1:将病人安置在手术牵引床上,并将患肢近端按常规手术方案固定在手术牵引床上;
4、s2:将骨折复位装置移动至手术牵引床后方,并驱动主动齿轮电机将环状股骨固定机构的夹持片撑开,使得患肢能够通过夹持片;
5、s3:将骨折复位装置向前推动,使得患肢穿过环状股骨固定机构,到达患肢远端适合位置后停下,并将患肢小腿放置在液压升降托架上,调整液压升降托架的高度托举患肢小腿,随后固定装置;
6、s4:驱动主动齿轮电机反向旋转,使得夹持片收紧以夹住患肢远端,并用液压升降托架调整小腿的高度至合适位置进行粗定位操作;
7、s5:安装松质骨固定环,将松质骨螺钉沿入路器置入患者股骨远端松质进行精定位操作;
8、s6:启动stewart平台执行骨折复位操作;
9、s7:由骨折复位装置固定复位姿态,沿髓内钉入路点置入髓内钉。
10、优选的,所述s2步骤中,环状股骨固定机构中设置有三组柔性夹持片,可以三个方向同时以面接触对腿部的肌肉组织施加加持力,施力均匀。
11、优选的,所述s3步骤中,液压升降托架可以用普通的升降台代替,环状股骨夹持机构可以用传统夹具代替。
12、优选的,所述s2步骤中采用的骨折复位装置包括,复位机器人,设置于所述复位机器人上的stewart平台,所述复位机器人的底部安装万向轮,所述stewart平台的顶部安装有环状股骨固定机构,所述环状股骨固定机构的一侧安装有松质骨固定环,所述stewart平台一侧的复位机器人顶部安装有液压升降托架。
13、与现有技术相比,本发明具有如下有益效果:
14、1、本发明通过刚性的松质骨螺钉和柔性的夹持片结合对患肢远端进行固定,刚性的松质骨螺钉与stewart平台相结合,可以确保断骨远端与stewart平台的相对位置不变,单螺钉即可实现定位功能,减少对患者的二次创伤,同时柔性的夹持片用于传递主要的加持力,可以在三个方向同时以免接触的方式对患肢的肌肉组织施加夹持力,施力均匀的同时提高患者舒适度。
15、2、本发明通过松质骨螺钉不承担搬运和夹持的任务,有效避免了传统螺钉夹持搬运应力集中的问题,从而避免了医源性骨裂的风险,同时松质骨螺钉的位置位于松质骨,不会阻挡后续髓内钉的置入,便于复位操作过程中后续的手术操作。
技术特征:
1.一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法,其特征在于:具体步骤如下:
2.如权利要求1所述一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法,其特征在于:所述s2步骤中,环状股骨固定机构中设置有三组柔性夹持片,可以三个方向同时以面接触对腿部的肌肉组织施加加持力,施力均匀。
3.如权利要求1所述一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法,其特征在于:所述s3步骤中,液压升降托架可以用普通的升降台代替,环状股骨夹持机构可以用传统夹具代替。
4.如权利要求1所述一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法,其特征在于:所述s2步骤中采用的骨折复位装置包括,复位机器人(1),设置于所述复位机器人(1)上的stewart平台(3),所述复位机器人(1)的底部安装万向轮(2),所述stewart平台(3)的顶部安装有环状股骨固定机构(4),所述环状股骨固定机构(4)的一侧安装有松质骨固定环(6),所述stewart平台(3)一侧的复位机器人(1)顶部安装有液压升降托架(5)。
技术总结
本发明属于医疗器械领域,提供了一种应用于机器人辅助股骨骨折复位治疗手术的夹持方法,具体步骤如下:S1:将病人安置在手术牵引床上,并将患肢近端按常规手术方案固定在手术牵引床上;S2:将骨折复位装置移动至手术牵引床后方,并驱动主动齿轮电机将环状股骨固定机构的夹持片撑开,使得患肢能够通过夹持片;本发明通过刚性的松质骨螺钉和柔性的夹持片结合对患肢远端进行固定,单螺钉即可实现定位功能,减少对患者的二次创伤,松质骨螺钉不承担搬运和夹持的任务,有效避免了传统螺钉夹持搬运应力集中的问题,从而避免了医源性骨裂的风险,同时松质骨螺钉的位置位于松质骨,不会阻挡后续髓内钉的置入,便于后续的手术操作。
技术研发人员:马信龙,马剑雄,李奕扬,王岩,李岩,靳洪震,董本超,孙磊,杨培川,孙亚迪,周丽芸,申佳慧
受保护的技术使用者:天津市天津医院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!