一种气动软体康复机器人
本发明涉及医疗器械,具体涉及一种气动软体康复机器人。
背景技术:
1、由于中风等疾病引起的偏瘫,会导致患者出现肌肉、韧带的痉挛或萎缩,从而使患者出现运动功能障碍。康复科学表明,尽早的对受损手指提供运动康复训练,有助于受损部位建立新的神经通道,重获已丧失的运动功能。
2、烧伤易导致患者手部掌指关节、近端指间关节、远端指间关节挛缩,同时,植皮术后易出现不同程度的瘢痕增生,尤其在皮肤较为薄弱的手指部分,易造成患者手指运动功能障碍,而有阶段性的牵伸训练可以有效减缓以上症状,改善患者的手部功能。
3、目前市面上已经出现了针对性的康复器械,要包括刚性康复手套和柔性康复手套两大类。柔性的康复手套因为其便携的特性,被越来越多的家庭所使用。但是,现有的手部康复器械,其驱动器一般位于手指背部(即手背侧),主要用于驱动手指的弯曲运动。虽然也有驱动手指伸直的功能,但驱动力较小,并且由于驱动力来源于背侧,容易因手指掌侧受力不均而出现医源性损伤可能。但是,肌张力高和存在瘢痕增生的患者,由于伸展方向驱动力不足,目前的康复器械对于该类患者的康复效果较差;同时患者手指呈蜷曲状态,常规结构康复手套不便于患者手指穿戴。
4、因此,本领域需要开发一种伸展方向驱动力足够大、而且方便穿戴的且特别针对肌张力高和手指关节挛缩患者的软体康复机器人。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种针对肌张力高和手指关节挛缩患者的康复器械。
2、为了实现本发明之目的,本申请提供以下技术方案。
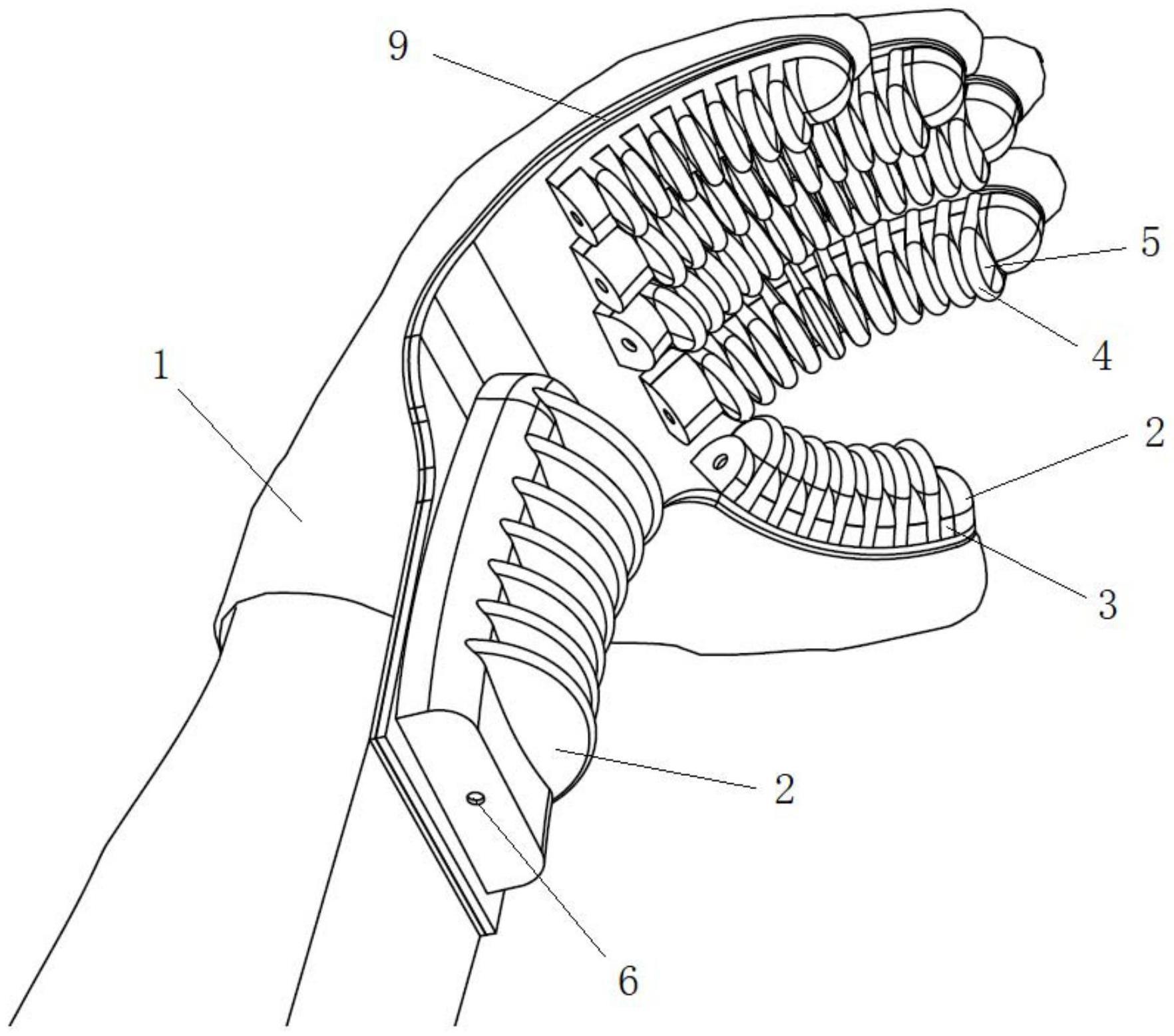
3、在第一方面中,本申请提供一种气动软体康复机器人,所述康复机器人包括手套本体以及多个独立设置的驱动单元,所述驱动单元固定设置在手套本体的手掌侧,且手套本体上每一根手指以及手腕处均固定有驱动单元,所述驱动单元用于驱动手指或手腕进行屈伸康复训练运动。
4、在第一方面的一种实施方式中,所述驱动单元包括腔体以及设置在腔体内的气腔,所述腔体的一侧与手套本体固定,且与手套本体固定的一侧的腔体厚度大于与其相对的另一侧的腔体厚度。
5、在第一方面的一种实施方式中,与手套本体固定一侧相对的另一侧腔体设有沿轴向均布的多个凸起,所述气腔的形状与所述腔体表面形状相匹配。
6、在第一方面的一种实施方式中,所述凸起包括垂直于腔体轴向的半环状结构以及设置在半环状结构两侧的膨胀结构。
7、在第一方面的一种实施方式中,所述腔体的材质为可伸缩的柔性材质。
8、在第一方面的一种实施方式中,所述腔体和手套本体固定处设有加热单元。
9、在第一方面的一种实施方式中,所述驱动单元包括设置在腔体尾端的气道,所述气道的一端连通气腔,另一端设有拆卸式安装的气管,所述气管与气源连接。
10、与现有技术相比,本发明的有益效果在于:
11、(1)该康复机器人的驱动单元安装在手掌侧,加大了手指伸开时的驱动力,对于肌张力高的患者康复更加有效;
12、(2)所有驱动单元单独进行控制,控制简单,且便于维修;
13、(3)在自然状态下或者抽出少量气体时,整个康复机器人(主要是手指部分)呈向下弯曲的状态,该状态与患者的蜷曲状态手指形状高度吻合,因此患者在穿戴时更加方便;
14、(4)在驱动单元和手套本体之间增设加热单元,可加快患者在使用时手部的血液循环,提高治疗效果;
15、(5)驱动单元的运动弧度与人体手指屈伸运动轨迹相匹配,更符合人体工学,更有利于治疗效果。
技术特征:
1.一种气动软体康复机器人,其特征在于,所述康复机器人包括手套本体以及多个独立设置的驱动单元,所述驱动单元固定设置在手套本体的手掌侧,且手套本体上每一根手指以及手腕处均固定有驱动单元,所述驱动单元用于驱动手指或手腕进行屈伸康复训练运动。
2.如权利要求1所述的气动软体康复机器人,其特征在于,所述驱动单元包括腔体以及设置在腔体内的气腔,所述腔体的一侧与手套本体固定,且与手套本体固定的一侧的腔体厚度大于与其相对的另一侧的腔体厚度。
3.如权利要求2所述的气动软体康复机器人,其特征在于,与手套本体固定一侧相对的另一侧腔体设有沿轴向均布的多个凸起,所述气腔的形状与所述腔体表面形状相匹配。
4.如权利要求3所述的气动软体康复机器人,其特征在于,所述凸起包括垂直于腔体轴向的半环状结构以及设置在半环状结构两侧的膨胀结构。
5.如权利要求2~4任一所述的气动软体康复机器人,其特征在于,所述腔体的材质为可伸缩的柔性材质。
6.如权利要求2所述的气动软体康复机器人,其特征在于,所述腔体和手套本体固定处设有加热单元。
7.如权利要求2所述的气动软体康复机器人,其特征在于,所述驱动单元包括设置在腔体尾端的气道,所述气道的一端连通气腔,另一端设有拆卸式安装的气管,所述气管与气源连接。
技术总结
本发明涉及一种气动软体康复机器人,所述康复机器人包括手套本体以及多个独立设置的驱动单元,所述驱动单元固定设置在手套本体的手掌侧,且手套本体上每一根手指以及手腕处均固定有驱动单元,所述驱动单元用于驱动手指或手腕进行屈伸康复训练运动。本发明的驱动单元安装在手掌侧,加大了手指伸开时的驱动力,适用于疾病导致肌张力异常增高及烧伤导致关节粘连和瘢痕增生的患者,以此提升其康复疗效。
技术研发人员:方凡夫,汤寅,石磊,陈居涵,李颖,宋佳亮,孟铭强
受保护的技术使用者:中国人民解放军海军军医大学第一附属医院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!