弧形放射治疗设备及其操作方法、加速器、磁场调整装置与流程
本技术涉及的,尤其涉及弧形放射治疗设备及其操作方法、操作设备、粒子加速器、磁场调整装置、计算机可读存储介质和计算机程序产品。
背景技术:
1、粒子放疗是一种现代的肿瘤治疗方法,它利用高能量粒子精确地瞄准肿瘤细胞,将能量精准地释放在肿瘤细胞内,从而杀死肿瘤细胞。粒子放疗能够精确地控制放疗的剂量和范围,减少对健康组织的伤害,同时提高治疗的效果。
2、粒子弧形放射治疗 (particle arc therapy,pat)是一种在治疗过程中,治疗机架可以连续不断旋转以调整射野角度的粒子放射治疗方法。pat的治疗计划(treatmentplanning system, tps)可将粒子射程的不确定性分摊到了各个不同的角度上,鲁棒性好。在治疗机架旋转过程中,用于提供粒子偏转磁场的线圈可能会发生一定的偏移,导致磁场方向发生偏转,最终影响粒子束的相关参数的稳定性。
3、基于此,本技术提供了弧形放射治疗设备及其操作方法、操作设备、粒子加速器、磁场调整装置、计算机可读存储介质和计算机程序产品,以改进相关技术。
技术实现思路
1、本技术的目的在于提供弧形放射治疗设备及其操作方法、操作设备、粒子加速器、磁场调整装置、计算机可读存储介质和计算机程序产品,保证在治疗机架的旋转过程中,粒子束的相关参数的变化在可接受范围内。
2、本技术的目的采用以下技术方案实现:
3、第一方面,本技术提供了一种磁场调整装置,应用于放射治疗系统中的粒子加速器,在治疗机架旋转过程中,所述粒子加速器随所述治疗机架旋转;
4、所述磁场调整装置用于根据机架角度的变化来调整所述粒子加速器中的粒子偏转磁场,以使粒子辐射源产生的粒子束在所述粒子偏转磁场的作用下满足预设的粒子束条件;
5、所述粒子束条件用于指示粒子束的能量、束斑尺寸和束斑位置中的一种或多种参数的预设范围。
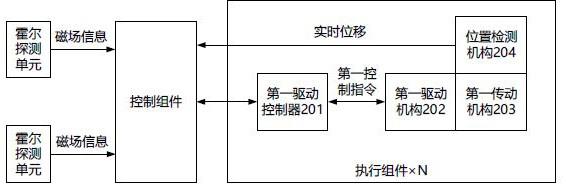
6、在一些可能的实现方式中,所述磁场调整装置包括探测组件、控制组件以及至少一个执行组件;
7、所述探测组件用于探测所述粒子偏转磁场的磁场信息;
8、所述控制组件用于根据所述磁场信息和预设磁场条件计算出所述粒子加速器的磁场提供装置的运动控制信息,并根据所述运动控制信息生成每个所述执行组件对应的第一控制指令;其中,所述预设磁场条件根据所述粒子束条件确定;
9、每个所述执行组件用于根据自身对应的第一控制指令调整所述磁场提供装置的位置和/或方向。
10、在一些可能的实现方式中,所述探测组件包括至少一个霍尔探测单元,用于探测所述粒子偏转磁场的至少一个位置以得到所述磁场信息;和/或,
11、所述磁场调整装置包括第一执行组件至第四执行组件,第一执行组件和第二执行组件位于所述磁场提供装置的第一侧,第三执行组件和第四执行组件位于所述磁场提供装置的第二侧,所述磁场提供装置的第一侧和第二侧相对设置;对所述第一执行组件的中心和所述第四执行组件的中心进行连线得到第一连线,对所述第二执行组件的中心和所述第三执行组件的中心进行连线得到第二连线,所述第一连线与所述第二连线相交。
12、在一些可能的实现方式中,每个所述执行组件包括第一驱动控制器、第一驱动机构和第一传动机构;
13、所述控制组件用于根据所述运动控制信息计算出每个所述第一传动机构的目标位移,并根据每个所述第一传动机构的目标位移生成其所隶属的执行组件对应的第一控制指令;
14、在每个所述执行组件中,所述第一传动机构与所述磁场提供装置固定连接,所述第一驱动控制器用于根据所述执行组件对应的第一控制指令驱动所述第一驱动机构运动,以使所述第一驱动机构带动所述第一传动机构运动目标位移,从而调整所述磁场提供装置的位置和/或方向。
15、在一些可能的实现方式中,每个所述执行组件还包括位置检测机构,在每个所述执行组件中:
16、所述位置检测机构用于实时检测得到所述第一传动机构的实时位移并发送至所述控制组件,以使所述控制组件根据所述第一传动机构的实时位移和目标位移生成新的第一控制指令并发送至所述第一驱动控制器;
17、所述第一驱动控制器用于根据所述新的第一控制指令驱动所述第一驱动机构运动,通过所述第一驱动机构带动所述第一传动机构运动,以使所述第一传动机构的实时位移与目标位移相匹配。
18、在一些可能的实现方式中,所述第一驱动机构采用电机;和/或,
19、所述第一传动机构采用机械轴;和/或,
20、所述位置检测机构采用电位计。调整
21、每个所述执行组件用于根据自身对应的第一控制指令调整所述磁场提供装置的位置和/或方向。
22、第二方面,本技术提供了一种粒子加速器,应用于放射治疗系统,在治疗机架旋转过程中,所述粒子加速器随所述治疗机架旋转;
23、所述粒子加速器包括:
24、粒子辐射源,用于产生粒子束;
25、腔体,用于使所述粒子束在其中加速;
26、磁场提供装置,用于为所述腔体提供粒子偏转磁场;
27、上述任一项磁场调整装置,用于调整所述粒子偏转磁场。
28、在一些可能的实现方式中,所述粒子束对应的粒子为质子或者重离子;和/或,
29、所述磁场提供装置包括至少一个超导线圈。
30、在一些可能的实现方式中,所述粒子加速器还包括:
31、束斑尺寸调整装置,用于调整所述粒子束的束斑尺寸。
32、在一些可能的实现方式中,所述束斑尺寸调整装置包括至少一个调整组件,每个所述调整组件包括第二驱动控制器、第二驱动机构、第二传动机构以及遮挡机构;
33、在每个所述调整组件中,所述第二传动机构与所述遮挡机构固定连接,所述第二驱动控制器用于根据所述调整组件对应的第二控制指令驱动所述第二驱动机构运动,以使所述第二驱动机构带动所述第二传动机构运动,从而调整所述遮挡机构的遮挡状态。
34、在一些可能的实现方式中,所述第二驱动机构采用电机;和/或,
35、所述第二传动机构采用丝杆;和/或,
36、所述遮挡机构采用成对设置且沿中心线呈对称排布的多个遮盖板。
37、在一些可能的实现方式中,所述粒子加速器还包括:
38、射频装置,用于为所述腔体提供加速电场;和/或,
39、真空装置,用于为所述腔体提供真空环境;和/或,
40、液冷装置,用于通过冷却液体为所述腔体进行液冷。
41、第三方面,本技术提供了一种弧形放射治疗设备,所述弧形放射治疗设备包括:
42、上述任一项粒子加速器,用于产生和调整粒子束;
43、束流配送系统,用于配送所述粒子束;
44、患者摆位系统,用于实现患者的摆位;
45、治疗机架,用于带动所述粒子加速器和所述束流配送系统围绕等中心进行旋转,实现粒子弧形放射治疗。
46、在一些可能的实现方式中,所述束流配送系统包括治疗头,所述治疗头包括主动式束流扫描治疗头和/或被动式散射治疗头;和/或,
47、所述患者摆位系统包括治疗床和影像系统。
48、在一些可能的实现方式中,所述弧形放射治疗设备还包括:
49、安全连锁系统,用于对所述粒子加速器、所述束流配送系统、所述患者摆位系统和所述治疗机架进行安全监测;和/或,
50、治疗计划系统,用于根据所述患者的术前医学影像数据,生成治疗计划;和/或,
51、控制软件系统,用于验证所述治疗计划和记录治疗过程数据。
52、第四方面,本技术提供了一种弧形放射治疗设备的操作方法,用以操作上述任一项弧形放射治疗设备,所述方法包括:
53、获取治疗计划,所述治疗计划包括多个预设角度区间以及每个所述预设角度区间对应的设定剂量;
54、分别旋转治疗机架至每个所述预设角度区间,以完成每个所述预设角度区间对应的粒子束的照射过程,从而完成弧形放射治疗过程。
55、在一些可能的实现方式中,所述预设角度区间为点值或者范围值。即,每个预设角度区间可以指一个角度,也可以指一个角度范围。
56、在一些可能的实现方式中,在旋转所述治疗机架之前,所述方法还包括:
57、将治疗床调整至预设的照射位置;
58、通过影像系统获取患者的术中医学影像数据;
59、对所述患者的术中医学影像数据和所述治疗计划进行图像配准,以得到治疗床调整信息;
60、根据所述治疗床调整信息,调整所述治疗床的位置与角度。
61、在一些可能的实现方式中,在调整所述治疗床的位置与角度之后,所述方法还包括:
62、通过所述影像系统重新获取所述患者的术中医学影像数据;
63、检测重新获取的术中医学影像数据和所述治疗计划是否已经完成配准;
64、如果已经完成配准,则执行旋转所述治疗机架的步骤;
65、如果未完成配准,则重新获取所述治疗床调整信息,以重新调整所述治疗床。
66、在一些可能的实现方式中,所述预设角度区间采用点值,以预设角度表示,在弧形放射治疗过程中,执行以下处理:
67、s1:旋转所述治疗机架至第一个预设角度;
68、s2:伸出治疗头,开始所述粒子束的照射过程;
69、s3:在所述预设角度下,监测所述粒子束的照射剂量,当所述粒子束的照射剂量达到所述预设角度对应的设定剂量时,停止所述粒子束的照射过程;
70、s4:缩回治疗头;
71、s5:检测是否存在下一个预设角度;如果存在,则执行s6;如果不存在,则执行s7;
72、s6:旋转所述治疗机架至下一个所述预设角度,执行s2;
73、s7:结束弧形放射治疗过程。
74、在一些可能的实现方式中,所述预设角度区间采用范围值,在弧形放射治疗过程中,执行以下处理:
75、r1:旋转所述治疗机架至第一个预设角度区间;
76、r2:伸出治疗头,开始所述粒子束的照射过程;
77、r3:在所述预设角度区间下,监测所述粒子束的照射剂量,当所述粒子束的照射剂量达到所述预设角度区间对应的设定剂量时,检测是否存在下一个预设角度区间;如果存在,则执行r4;如果不存在,则执行r5;
78、r4:旋转所述治疗机架至下一个所述预设角度区间,执行r3;
79、r5:停止所述粒子束的照射过程,缩回治疗头,结束弧形放射治疗过程。
80、在一些可能的实现方式中,所述治疗头的伸出位置不超出预设位置,所述预设位置根据预设的碰撞约束条件确定。
81、第五方面,本技术提供了一种弧形放射治疗设备的操作设备,用以操作上述任一项弧形放射治疗设备,所述操作设备包括存储器和至少一个处理器,所述存储器存储有计算机程序,所述至少一个处理器被配置成执行所述计算机程序时实现以下步骤:
82、获取治疗计划,所述治疗计划包括多个预设角度区间以及每个所述预设角度区间对应的设定剂量;
83、分别旋转治疗机架至每个所述预设角度区间,以完成每个所述预设角度区间对应的粒子束的照射过程,从而完成弧形放射治疗过程。
84、第六方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被至少一个处理器执行时实现上述任一项方法的步骤或者实现上述任一项操作设备的功能。
85、第七方面,本技术提供了一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被至少一个处理器执行时实现上述任一项方法的步骤或者实现上述任一项操作设备的功能。
- 还没有人留言评论。精彩留言会获得点赞!