一种基于肝肿瘤消融的超声定位系统及其方法
本发明涉及超声影像,具体涉及一种基于肝肿瘤消融的超声定位系统以及应用该系统的方法。
背景技术:
1、据世界卫生组织(who)2022年发布的报告显示,全球每年约905,000例肝癌新发病例,而约830,000例肝癌患者死亡。肝细胞癌(hcc)作为恶性肿瘤的一种,也成为世界人口的重要健康问题之一。传统的消融介入手术,一般在术前和术中的x光影像的参考下,术者使用18g穿刺针对肿瘤部位进行定位消融。然而在实际应用中,手术方法存在许多局限性,如:影像与实际肿瘤的位置之间的映射不够直观,手术精度难以保证且需要医生通过经验来判断入针位置、对病人的侵入性大、手术困难度大,因此延长延长了手术时间、不可避免地给医生和患者带来了较多的辐射量。
2、在该领域的肝肿瘤消融介入手术的手术机器人系统不多,例如,专利申请号为cn201910737901的一种基于医学影像三维重建及全息显示的肝段切除术辅助系统,其通过多个处理模块对患者ct/mri扫描序列图像进行配准,对患者进行术前模拟肝段划分与风险分析等,继而进行术前规划。在该技术方案中,该系统优先使用ar眼镜技术展示术前规划结果辅助医护人员手术,然而ar眼镜技术尚未完全成熟,对于精度要求高的肿瘤切除手术来说仍存在较大误差,缺乏安全性。另外,该系统无法搭载于自动化更高、对术者来说更为方便的手术机器人中,且该系统使用ct扫描图像,医生与对患者的受到的辐射剂量大,对术者、患者均会造成伤害。
3、专利申请号为cn200910273516的一种基于三维多模影像的肝肿瘤综合手术规划模拟方法及其系统,其设计原理与上述专利类似,通过三维配准和融合、模拟与分析,规划出术前手术路径。在该专利文档中仍未提出一种与该系统相匹配的自动化硬件手术系统,且无法保证其配准精度,整个手术操作过程中均为开环操作。问题与上述专利一样,该系统使用ct扫描图像,长时间暴露在辐射环境中,对术者、患者都会造成或多或少的伤害。
4、专利申请号为cn201821342041的一种精准定位的肿瘤手术机器人系统仅通过六自由度机械臂、跟踪标记组件与远红外摄像头实现定位与手术操作。然而在该技术方案中,仅着重强调机器人系统的硬件部分,未详细给出外部电脑如何进行精确定位的步骤和方案,其方案未能表现出系统与医学影像之间的精确配准关系,无法保证手术的精度,保护患者的安全。
技术实现思路
1、针对现有技术存在的上述不足,本发明在能够满足临床操作的基础上提供一种基于肝肿瘤消融的超声定位系统及其方法,该系统和方法将超声定位系统集成入该类机器人中,在完成各坐标系配准后,术前医学影像和术中超声影像被统一到机器人定位坐标系下,从而使机器人能根据患者肝肿瘤的位置,实现基于术前影像的精准入针路径规划和基于术中影像的安全引导。
2、为解决上述问题,本发明所采用的技术方案如下:
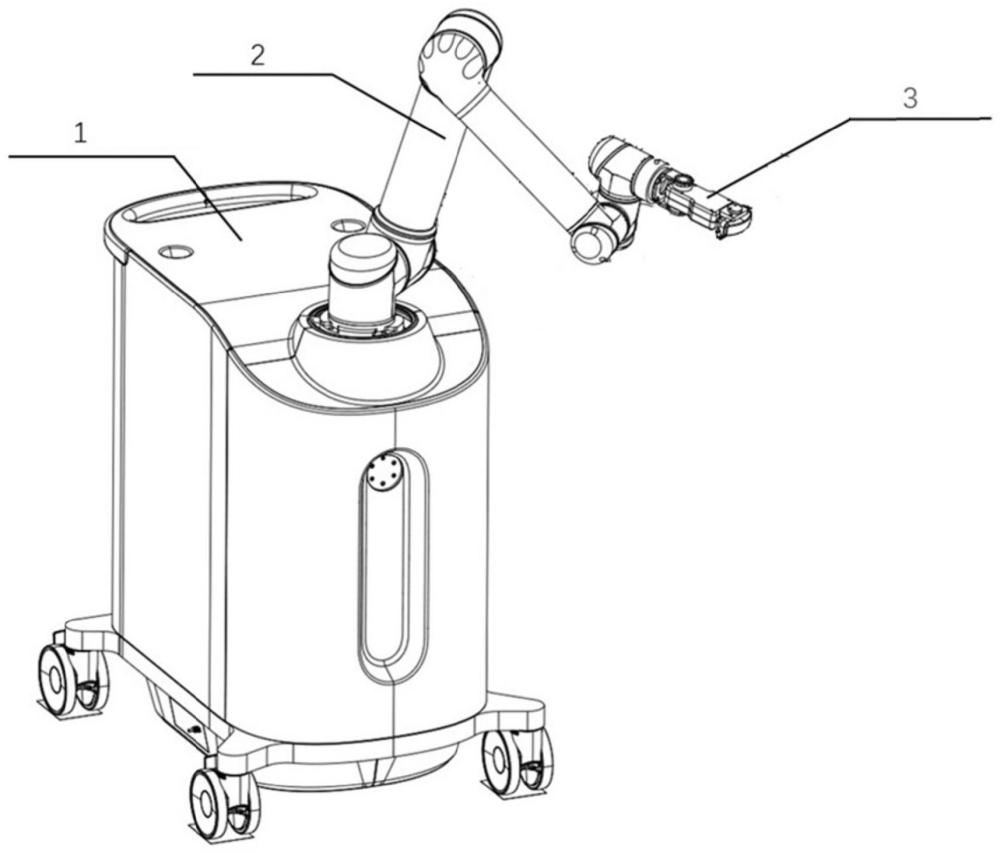
3、一种基于肝肿瘤消融的超声定位系统,该系统包括电磁定位跟踪系统以及手术机器人,所述手术机器人包括机械臂移动推车模块,在所述机械臂移动推车模块上设有串联机械臂模块,所述串联机械臂模块包括相互连接的六自由度机械臂和机械臂末端执行器,所述机械臂末端执行器的末端部分为带有穿刺针的超声扫描头,所述电磁定位跟踪系统包括电磁跟踪系统以及安装在超声扫描头上的电磁位置传感器,将带有所述电磁位置传感器的穿刺针固定架固定在超声扫描头上,通过所述六自由度机械臂的运动来带动操作机械臂末端执行器的超声扫描头,以获取实时超声扫描图像,通过手术机器人执行所规划的机器人轨迹路径,完成手术机器人辅助穿刺针介入位置的超声定位;
4、其中,在所述电磁跟踪系统中集成有电磁跟踪系统坐标系。
5、一种基于肝肿瘤消融的超声定位方法,该方法应用于上述的一种基于肝肿瘤消融的超声定位系统,该方法包括以下步骤:
6、进行第一次ct扫描,获取初始医学影像,所述初始医学影像用于作为初始配准图像;
7、通过所述初始医学影像获取消融针介入位置,获取超声扫描头对准范围以及机器人所经路径及姿态;
8、进行超声扫描,获取超声医学影像;
9、基于超声医学影像进行超声三维图像的重建;
10、通过三维超声与术前ct图像的配准算法,将重建所得的超声三维图像坐标系与初始医学影像坐标系进行配准,将末端执行器坐标系与所述超声三维图像坐标系进行配准;
11、获得在电磁跟踪定位坐标系下表示的末端执行器坐标系、超声三维图像坐标系和初始医学影像坐标系之间的坐标转换关系,得到基于初始医学影像和超声三维图像的配准融合影像;
12、基于配准融合影像生成机器人轨迹路径,通过手术机器人实现基于初始医学影像的精准入针路径规划和基于超声三维图像的安全引导,使得手术机器人执行所规划的机器人轨迹路径;
13、进行第二次ct扫描,调整机器人轨迹路径,完成手术机器人辅助穿刺针介入位置的超声定位。
14、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,进行超声三维图像的重建,包括:
15、使用超声重建算法对超声医学影像进行三维重建,该超声重建算法基于加权最小二乘法估计超声医学影像的体素即计算其在三维中的块来对超声医学影像进行三维重建。
16、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,加权最小二乘法在方程中的最优化表示使用矩阵表示为公式(1)-(4):
17、
18、y=[y1,y2,...,yp]t, (9)
19、
20、wx=diag[kh(x0-x),kh(x1-x),...,kh(xp-x)] (11)
21、其中,x为超声二维扫描图像数据,y为术前ct影像数据,“diag”表示矩阵对角矩阵的元素在(i,i)中是kh(·)。
22、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,估计超声医学影像的体素即计算其在三维中的块,此时基于加权最小二乘法优化的体素估计值的表示为公式(5):
23、
24、其中e1是一个除了第一列元素为1其他元素都为0的列向量,是估计值;特征矩阵xx被写为公式(6):
25、
26、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,所述三维超声与术前ct图像的配准算法通过计算重建的超声三维影像的块与初始医学影像的块之间的最大归一化互相关来确定其配准关系,即可获得第二空间位姿与第二空间位姿的三维空间转换矩阵。
27、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,采用图像配准框架,获取参考图像和浮动图像,其中,参考图像来自重建所得的超声三维图像,浮动图像来自第一次ct扫描的初始医学影像像;
28、利用块匹配算法,在当前变换后的浮点图像和参考图像之间建立点对应关系,通过将参考图像和变换后的浮动图像分割成大小一致的块;
29、将参考图像中的每个块与变换后的浮动图像的对应邻域中的图像块进行比较,其中,匹配块是与参考块具有最大归一化互相关的块,其计算表示为公式(7):
30、
31、其中,rr(x)和rf(x)分别表示参考和浮动图像中的体素,即参考图像和浮动图像中的块,μ和σ对应于块内的平均值和标准偏差值,n是块中的体素数量。
32、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,使用lts回归算法根据获得的图像块对应计算变换参数,迭代执行包括:优化从大的块搜索邻域开始,然后以由粗到精的策略向较小的搜索邻域移动;
33、获得超声三维图像坐标系和初始医学影像坐标系之间的坐标转换关系。
34、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,在获得在电磁跟踪定位坐标系下表示的末端执行器坐标系、超声三维图像坐标系和初始医学影像坐标系之间的坐标转换关系的同时,还将机器人本身坐标系统一到电磁跟踪定位坐标系中,即可将所有的坐标系统一到电磁跟踪定位坐标系来进行表达,即可得到基于初始医学影像和超声三维图像的配准融合影像。
35、根据本发明提供的一种基于肝肿瘤消融的超声定位方法,通过电磁位置传感器接收由该传感器检测到的手术区域中相对于至少一件手术器械的移动的指示,所述电磁位置传感器配置成检测所述手术区域中相对于至少一件手术器械的移动,以及响应接收指示从而自动控制六自由度机械臂,以便通过沿着所规划的机器人轨迹路径的轨迹维持至少一件手术器械的位置来补偿手术区域的移动。
36、由此可见,相对于现有技术,
37、本发明提供的机器人系统及方法设计是针对于进针前为术者进行进针规划的过程,并没有直接对手术患者进行操作。在对患者肿瘤部位进针消融前,由机器人末端执行器操作超声探头扫描成像,在术前ct影像的基础上规划消融针介入位置,规划超声扫描头对准范围以及机器人所经路径及姿态,可以自动完成进针路径规划,从而保证系统所规划路径符合实际的肝脏肿瘤位置以及保证消融的精确度。
38、另外,本发明所提及到的所有的坐标系将可以通过统一的电磁跟踪系统坐标系来进行表达,即可基于此得到术前ct-术中超声的配准融合影像,使机器人能根据患者肝肿瘤的位置,实现基于术前影像的精准入针路径规划和基于术中影像的安全引导,可以让机器人执行所规划的运动,随后将消融针夹于针架处,由医生手动入针完成机器人辅助定位入针消融,同时通过第二次ct扫描让机器人系统在术中及时根据穿刺误差而进行调整,最终完成机器人辅助入针消融。
39、下面结合附图和具体实施方式对本发明作进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!