包含磁传感器阵列的超声探头的标定方法及标定系统与流程
本公开涉及医学影像,具体涉及一种包含磁传感器阵列的超声探头的标定反方及标定系统。
背景技术:
1、介入治疗是临床诊断和治疗中的常用手段,其需要医生将穿刺针、导管等器材准确插入患者目标组织之中,比如手术麻醉或手术后止痛的外周神经阻滞。当前临床治疗中,通常使用超声成像技术对介入治疗进行引导,在引导过程中超声图像上同时显示患者体内图像和介入装置图像,医生依此判断介入装置和目标部位的相对位置关系。然而由于介入装置呈现细长状,超声成像范围仅为一个平面,因此介入装置十分容易离开超声成像平面,使医生无法准确判断介入装置位置。为了解决这一问题,人们研发了多种导航方法,通过在超声探头和介入设备上安装传感器,从而同时获取超声探头和介入设备的位姿信息,并将位姿信息通过图形界面提供给医生,使医生始终可以准确判断介入设备和目标部位的相对位姿关系。
2、近年来一种磁导航技术逐渐得到人们重视,如专利cn103945772a和cn113473916a,其原理为,在超声探头内部安装一个磁传感器阵列,该磁传感器阵列包含多个三轴磁传感器,可以实时获取三维磁场矢量,介入设备通过某种方式被磁化,可以产生稳定不变的磁场,使环境磁场出现磁异常现象,超声探头中的磁传感器阵列通过分析磁异常现象计算得到介入设备和超声探头的相对位姿关系。该磁导航方式相比于其他导航方式,具备更好的便携性和灵活性,磁传感器阵列体积十分小巧,可以内置在超声探头内且超声探头外形基本保持不变,同时介入设备上无需安装任何传感器,只需要使用磁化设备对其进行磁化即可,不必使用特定介入设备。
3、采用磁导航技术计算介入设备和超声探头的相对位姿关系,需要准确获取磁传感器阵列中各个磁传感器的参数及位姿关系,以及磁传感器阵列和超声探头的相对位姿关系,获取磁传感器阵列和超声探头的位姿及参数的过程称为标定,标定的精度直接影响定位的精度。当前常用的标定方法分为两步,第一步单独对磁传感器阵列进行校准,计算得到磁传感器阵列中各个磁传感器的参数以及其之间的相对位姿关系,如中国发明专利申请cn113514789a和cn114859280a所公开的内容;第二步计算磁传感器阵列和超声探头之间的相对位姿关系,通常采用的方法是使用超声探头对一个尺寸已知的体模进行成像,根据体模特征计算超声探头的位姿和磁传感器阵列的位姿,如中国发明专利申请cn115005864a所公开的内容。然而分成两步的标定方法,不仅需要准备两套设备分别用于两个步骤,操作繁琐,而且繁多的计算步骤增加了累计误差,使标定的精度降低。
4、综上所述,设计一种定位精度高、操作简单快捷的包含磁传感器阵列的超声探头的标定方法及标定系统是十分有必要的。
技术实现思路
1、有鉴于此,有必要提供一种包含磁传感器阵列的超声探头的标定方法及标定系统,用以克服现有技术中标定过程繁琐且标定精度较低的问题。
2、为了解决上述技术问题,本公开第一方面提供的一种包含磁传感器阵列的超声探头的标定方法,所述磁传感器阵列固定在所述超声探头上,所述磁传感器阵列含有多个用于获取磁场矢量的磁传感器,所述标定方法包括以下步骤:
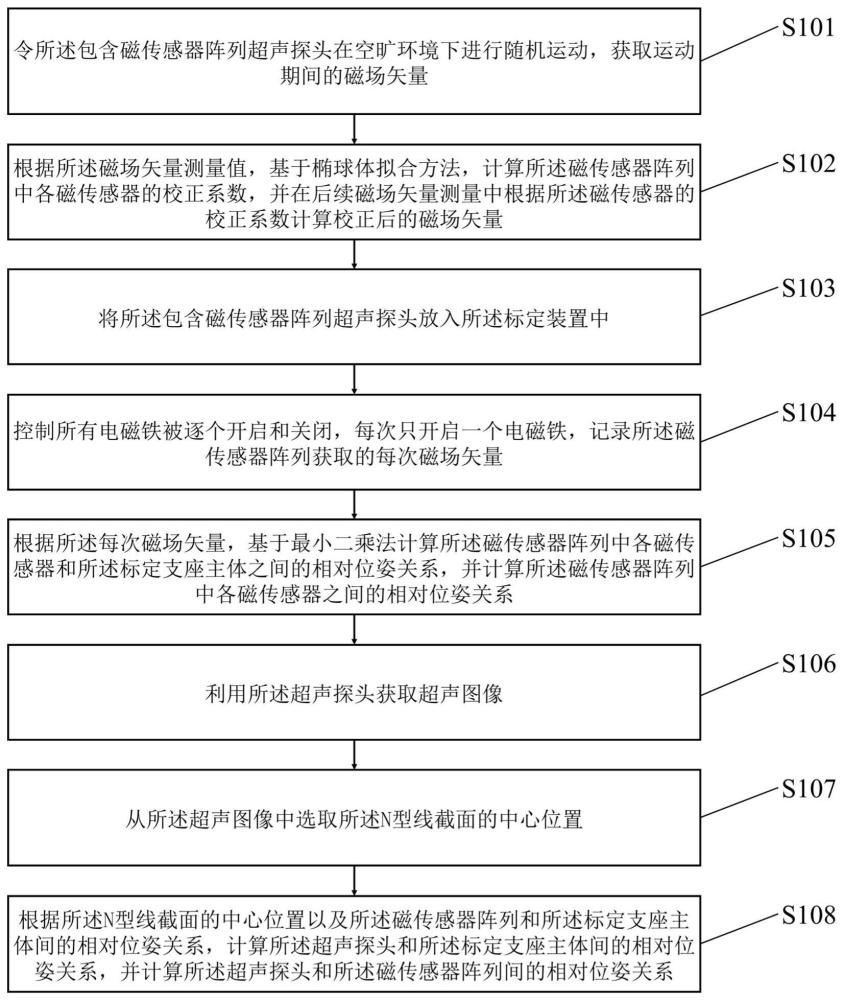
3、步骤1:令所述包含磁传感器阵列超声探头在空旷环境下进行随机运动,获取运动期间的磁场矢量;
4、步骤2:基于椭球体拟合方法,计算所述磁传感器阵列中各磁传感器的校正系数,并在后续磁场矢量测量中根据所述磁传感器的校正系数计算校正后的磁场矢量;
5、步骤3:将所述包含磁传感器阵列超声探头放入标定装置中,所述标定装置包括标定支座、安装于所述标定支座上并均匀分布在所述磁传感器阵列周围的若干电磁铁、安装于所述标定支座上并与所述超声探头的成像平面相交的n型线和填充于所述标定支座内且包含所述超声探头的成像范围的导声介质;
6、步骤4:控制所有电磁铁被逐个开启和关闭,每次只开启一个电磁铁,记录所述磁传感器阵列获取的每次磁场矢量;
7、步骤5:根据所述每次磁场矢量,基于最小二乘法计算所述磁传感器阵列中各磁传感器和所述标定支座主体之间的相对位姿关系,并计算所述磁传感器阵列中各磁传感器之间的相对位姿关系;
8、步骤6:利用所述超声探头获取超声图像,所述超声图像中包含所述导声介质和所述n型线截面;
9、步骤7:从所述超声图像中选取所述n型线截面的中心位置;
10、步骤8:根据所述n型线截面的中心位置以及所述磁传感器阵列和所述标定支座主体间的相对位姿关系,计算所述超声探头和所述标定支座主体间的相对位姿关系,并计算所述超声探头和所述磁传感器阵列间的相对位姿关系。
11、在一些实施例中,所述校正系数包括偏置矢量v和缩放矩阵w,将各磁传感器的磁场矢量测量值视为三维坐标,对其进行椭球体拟合,其中拟合得到的椭球体中心坐标即为磁传感器的偏置矢量v,椭球体变换为球体的系数矩阵即为磁传感器的缩放矩阵w,则对于每一个磁传感器的磁场矢量测量值根据所述校正系数得到各自校正后的磁场矢量b为:
12、在一些实施例中,所述电磁铁的个数应不少于4个,且所述电磁铁能产生相同或近似相同的磁场。
13、在一些实施例中,所述n型线包含多个n型结构,在所述n型结构中存在两条直线为平行关系,且至少存在一根直线与所述超声探头的成像平面垂直。
14、在一些实施例中,所述步骤5具体包括:
15、设i是一个不大于所述磁传感器阵列中磁传感器个数的正整数,j是一个不大于所述电磁铁个数的正整数,当第j个所述电磁铁被开启后,所述磁传感器阵列中第i个磁传感器获取的校正后的磁场矢量为tibij,上标ti表示第i个磁传感器坐标系,并记第j个所述电磁铁中心在标定支座主体坐标系下的坐标为wpj,第j个所述电磁铁中心的磁场矢量方向在所述标定支座主体坐标系下为whj,上标w表示标定支座主体坐标系;当全部电磁铁处于关闭状态时,设所述磁传感器阵列中第i个磁传感器获取的校正后的磁场矢量为tibi0;在所述标定支座主体坐标系下,第i个磁传感器测量x轴、y轴换入z轴磁场分量的测量元器件坐标分别为wpix、wpiy和wpiz,以及第i个磁传感器坐标系相对于所述标定支座主体坐标系的旋转矩阵为则第i个磁传感器测量得到第j个所述电磁铁产生的磁场矢量的理论值按照下式计算得到:
16、
17、其中,me为所述电磁铁的矫顽性系数,(·)x表示矢量的x轴分量,(·)y表示矢量的y轴分量,(·)z表示矢量的z轴分量,||·||表示矢量的二范数;
18、通过最小二乘法计算所述电磁铁的矫顽性系数me、第i个磁传感器的位姿参数wpix、wpiy、wpiz、计算公式为:
19、
20、根据第i个磁传感器的位姿参数wpix、wpiy、wpiz、得到所述磁传感器阵列中各磁传感器间的相对位姿关系。
21、在一些实施例中,所述步骤8具体包括:
22、设超声探头坐标系和超声图像坐标系{i}重合,根据所述超声探头的成像参数,设获取超声图像的像素边长的实际长度为s,则第k个被选取像素在所述超声探头坐标系下的坐标ippk=[sxk syk 0]t,(xk,yk)为第k个被选取像素的像素坐标;根据超声图像中n型线的几何关系计算出第k个被选取像素对应的n型线截面中心在标定支座主体坐标系下的坐标wppk,利用点云精配准方法计算在所述标定支座主体坐标系下的超声探头坐标系原点坐标wpi,以及标定支座主体坐标系和超声探头坐标系间的变换旋转矩阵计算公式为:
23、
24、其中,为旋转矩阵,itt为平移向量,wp1x为磁传感器阵列中第1个磁传感器测量x轴磁场分量的测量元器件坐标,设磁传感器阵列坐标系原点与第1个磁传感器测量x轴磁场分量的电桥重合,且方向与第1个磁传感器坐标系的方向相同;
25、根据上述公式得到所述超声探头和所述磁传感器阵列之间的相对位姿关系。
26、本公开第二方面提供的一种包含磁传感器阵列的超声探头的标定系统,所述磁传感器阵列固定在所述超声探头上,所述磁传感器阵列含有多个用于获取磁场矢量的磁传感器,所述标定系统包括标定装置和计算模块;
27、所述标定装置包括:
28、标定支座,包括标定支座主体和形成于所述标定支座主体内的超声探头放置孔、多个电磁铁安装孔、n型线安装孔和导声介质容纳腔,所述包含有磁传感器阵列的超声探头放置在所述超声探头放置孔中;
29、多个电磁铁,安装于相应的一个电磁铁安装孔中并均匀分布在所述磁传感器阵列的周围,所述电磁铁产生的磁场能被所述磁传感器阵列获取;
30、n型线,安装于所述n型线安装孔中,且与所述超声探头的成像平面相交;
31、导声介质,填充于所述导声介质容纳腔内,使所述超声探头的成像范围内均存在有所述导声介质,所述n型线完全穿过所述导声介质;
32、所述计算模块,用于计算所述磁传感器阵列中各磁传感器间的相对位姿关系以及所述磁传感器阵列和所述超声探头间的相对位姿关系。
33、在一些实施例中,所述电磁铁的个数应不少于4个,且所述电磁铁能产生相同或近似相同的磁场;标定过程中,控制所有电磁铁被逐个开启和关闭,每次只开启一个电磁铁,并记录每次的磁场矢量。
34、在一些实施例中,所述n型线包含多个n型结构,在所述n型结构中存在两条直线为平行关系,且至少存在一根直线与所述超声探头的成像平面垂直。
35、在一些实施例中,所述计算模块的计算过程包括:
36、待将所述包含有磁传感器阵列的超声探头放置在所述超声探头放置孔中后,控制所有电磁铁被逐个开启和关闭,每次只开启一个电磁铁,并记录每次的磁场矢量;
37、根据每次的磁场矢量,基于最小二乘法计算所述磁传感器阵列中各磁传感器和所述标定支座主体间的相对位姿关系,并计算所述磁传感器阵列中各磁传感器间的相对位姿关系;
38、利用所述超声探头获取超声图像,所述超声图像中包含所述导声介质和所述n型线截面;
39、从所述超声图像中选取所述n型线截面的中心位置;
40、根据所述n型线截面的中心位置和所述磁传感器阵列中各磁传感器和所述标定支座主体间的相对位姿关系,计算所述超声探头和所述标定支座主体间的相对位姿关系,并计算所述超声探头和所述磁传感器阵列间的相对位姿关系。
41、与现有技术相比,本公开的有益效果包括:
42、所述包含磁传感器阵列的超声探头的标定方法和标定系统中,采用的标定装置集成了稳定磁场源和n型线超声成像结构,可以同时用于所述磁传感器阵列中各个磁传感器相对位姿关系的计算,以及所述超声探头与所述磁传感器阵列相对位姿关系的计算,与传统技术相比,该装置有效简化了标定设备的复杂度,降低对包含磁传感器阵列的超声探头标定的所需成本。
43、所述包含磁传感器阵列的超声探头的标定方法和标定系统中,以标定装置的标定支座主体的尺寸特征为基准,实现对磁传感器阵列位姿和超声探头位姿的快速配准,具体地,仅使用一个标定装置即可完成磁传感器阵列中磁传感器位姿计算和超声探头与磁传感器阵列相对位姿关系计算两个标定步骤,极大程度地提高了标定的便捷性。而在传统技术中由于缺少统一基准,需要对所述磁传感器阵列额外进行一次定位,本发明提供的方法省去了额外的定位步骤,且由于电磁铁和n型线均固定在标定支座主体上,因此在计算超声探头与磁传感器阵列相对位姿关系时,可以基于标定支座主体坐标系直接计算得到,减小了累计误差,提高了标定精度。除此之外,该方法实现了所述磁传感器阵列中各个磁传感器相对位姿关系的计算以及所述超声探头与所述磁传感器阵列相对位姿关系的计算流程自动化进行。
- 还没有人留言评论。精彩留言会获得点赞!