一种腹部推拿机器人
本发明涉及护理机器人,尤其涉及一种腹部推拿机器人。
背景技术:
1、便秘是常见的临床症状,表现为排便困难和(或)排便次数减少、粪便干硬。严重影响患者的日常生活和生命质量,部分患者反复就医或滥用泻药,增加了医疗费用。全球流行率为12%至19%,且女性慢性便秘患病率高于男性。便秘使患者生活质量下降,造成了明显的经济和社会负担。
2、快节奏的现代生活引领人民思想观念发生转变,也导致各种身体亚健康症状如便秘的产生。高发疾病如脑卒中、脑瘫、脊髓损伤等也很容易出现便秘的症状。而按摩推拿治疗作为一种非侵入的行之有效的治疗手段,以其无痛、体验舒适、易于配合、安全性高等优点广受关注。因此产生了巨大的社会需求。临床上的按摩推拿治疗往往都是人工施展,但是目前富有经验的中医治疗师人数有限,无法满足社会需求。并且按摩推拿治疗过程十分耗时耗力,治疗效果还会因为操作者的水平、经验和体力的不同而具有差异形,按摩方式也难以规范统一。为了得到有益效果,针对便秘的腹部按摩频率至少每天一次,每次需要持续15min左右,这显然给治疗师带来严重负担,对于患者和社会而言也带来了经济负担。
3、为了缓解上述问题,腹部仿生按摩机器人应运而生。借助机器人技术、传感技术以及信息技术等,作为服务型机器人的腹部仿生按摩机器人不仅可以对患者肢体施加精准的力与运动控制、也可以记录详实的操作数据及图形。能够为临床康复医生提供客观、准确的治疗和评价参数,以促进改善康复效果和提高康复效率的潜力,同时它还可以排除人为因素,不会受到治疗师水平的影响,保证了操作过程中的效率和强度。可实现长期、稳定的重复训练,有利于提高中医康复的效果。
4、为了适应人体各部位的大小尺寸和力度要求,目前市场上针对腹部按摩的机器人分为两种穿戴式和非穿戴式。穿戴式的作用器为气囊结构或者少量的机械作用头;非穿戴式的则分别是基于机械臂或者大型调节平台的简单按摩头和需要手持的振动机构。前者穿戴式的作用点局限,作用手法单一;后者非穿戴式则明显造价成本增加,控制更为复杂,还会给使用者带来心理上的压迫感等等。
技术实现思路
1、本发明的目的在于提出一种适配性高,实现投影范围全覆盖及角度可调的腹部推拿机器人。
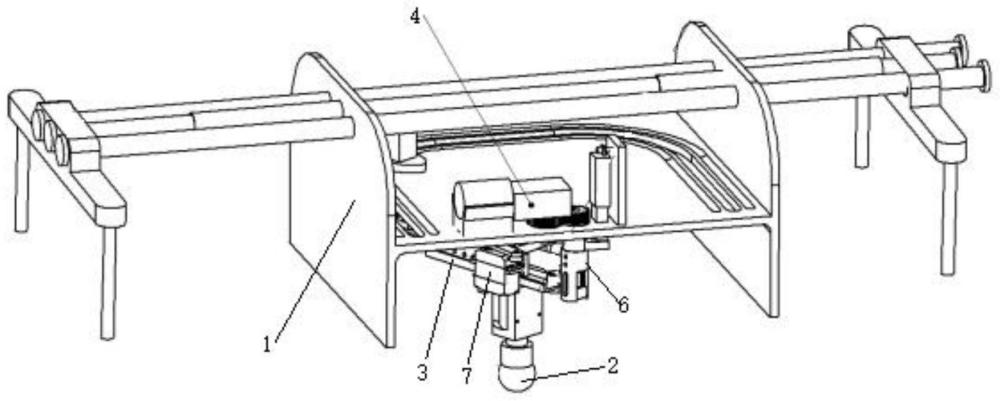
2、为达到上述目的,本发明提出一种腹部推拿机器人,包括固定架、按摩头、支撑导轨、轴向驱动机构、推杆驱动机构和直线驱动机构;
3、所述轴向驱动机构固定于所述固定架上,所述支撑导轨的一端与所述轴向驱动机构传动连接;所述固定架的腹板表面设有槽轨,所述支撑导轨的另一端顺着所述槽轨的导向位移;
4、在所述支撑导轨的两端均设置一组所述推杆驱动机构;
5、所述按摩头通过所述直线驱动机构设于所述支撑导轨上,在所述直线驱动机构的带动下顺着所述支撑导轨的导向位移。
6、进一步的,所述固定架为h型固定架,在两块侧板上开设有通孔,用于插接连接杆后,通过连接中心连接外接设备。
7、进一步的,所述推杆驱动机构包括推杆电机、电机固定件、异形连接件、固定套筒和关键连接件;
8、所述推杆电机通过所述电机固定件固定在所述固定架上,所述推杆电机的传动轴和所述异形连接件传动连接,所述异形连接件的底部安装所述固定套筒,所述支撑导轨的端部通过所述关键连接件与所述固定套筒滑动连接;
9、在所述支撑导轨的两端,靠近槽轨一端设置的为第一推杆驱动机构,靠近所述轴向驱动机构设置的为第二推杆驱动机构。
10、进一步的,所述第一推杆驱动机构中,在所述电机固定件的底部安装与固定架表面滑动接触的滚珠轴承。
11、进一步的,所述轴向驱动机构包括盘式电机和传动轮;
12、所述盘式电机通过所述传动轮与一根花键轴传动连接,所述花键轴的一端与所述传动轮键连接,所述花键轴实现在所述传动轮键槽内的上下位移;所述花键轴的另一端贯穿所述第二推杆驱动机构的异形连接件之后与所述固定套筒相连接;所述花键轴的外还套设一个轴承,所述轴承位于所述异形连接件的上方,将所述异形连接件夹持于所述轴承和所述固定套筒之间,所述固定套筒在所述花键轴的传动下,实现相对所述异形连接件的自转。
13、进一步的,所述传动轮的数量为两个,一个与所述盘式电机的传动轴相连接,另一个与所述花键轴键连接,两个所述传动轮啮合传动;
14、所述传动轮设于所述固定架上,与所述固定架的表面之间设置平面轴承。
15、进一步的,所述支撑导轨包括外导轨和内导轨,所述内导轨的一端插入所述外导轨内,使得所述内导轨实现相对所述外导轨的伸缩;所述外导轨和所述内导轨限位配合,防止脱轨。
16、进一步的,所述直线驱动机构包括连杆组件、舵机和移动座;
17、所述移动座活动连接于所述支撑导轨上,所述连杆组件和所述移动座传动连接,所述舵机和所述连杆组件传动连接。
18、进一步的,所述连杆组件包括一根固定杆、两根长连杆、两根第一短连杆和两根第二短连杆;
19、其中,所述固定杆固定于所述支撑导轨的一端,两根第一短连杆的一端分别和所述固定杆的两端活动连接,两根所述第一短连杆的另一端分别活动连接一根所述长连杆,两根所述长连杆交叉布置后,分别连接两根所述第二短连杆;所述舵机固定于所述移动座上,一根所述第二短连杆连接所述移动座,另一跟所述第二短连杆连接所述舵机的传动轴。
20、与现有技术相比,本发明的优势之处在于:
21、1、使用串并联的方式实现投影范围全覆盖及角度可调,可以尽可能地减小按摩设备体积、降低成本、控制方式也更为简单。
22、2、本发明的腹部推拿机器人推拿范围可以通过改变固定架表面的槽轨来实现,各驱动组件的配合可以实现按摩头在空间内上下左右前后的各方位调整,从而实现各种按摩手法模拟。
技术特征:
1.一种腹部推拿机器人,其特征在于,包括固定架、按摩头、支撑导轨、轴向驱动机构、推杆驱动机构和直线驱动机构;
2.根据权利要求1所述的腹部推拿机器人,其特征在于,所述固定架为h型固定架,在两块侧板上开设有通孔,用于插接连接杆后,通过连接中心连接外接设备。
3.根据权利要求1所述的腹部推拿机器人,其特征在于,所述推杆驱动机构包括推杆电机、电机固定件、异形连接件、固定套筒和关键连接件;
4.根据权利要求3所述的腹部推拿机器人,其特征在于,所述第一推杆驱动机构中,在所述电机固定件的底部安装与固定架表面滑动接触的滚珠轴承。
5.根据权利要求3所述的腹部推拿机器人,其特征在于,所述轴向驱动机构包括盘式电机和传动轮;
6.根据权利要求5所述的腹部推拿机器人,其特征在于,所述传动轮的数量为两个,一个与所述盘式电机的传动轴相连接,另一个与所述花键轴键连接,两个所述传动轮啮合传动;
7.根据权利要求1所述的腹部推拿机器人,其特征在于,所述支撑导轨包括外导轨和内导轨,所述内导轨的一端插入所述外导轨内,使得所述内导轨实现相对所述外导轨的伸缩;所述外导轨和所述内导轨限位配合,防止脱轨。
8.根据权利要求1所述的腹部推拿机器人,其特征在于,所述直线驱动机构包括连杆组件、舵机和移动座;
9.根据权利要求8所述的腹部推拿机器人,其特征在于,所述连杆组件包括一根固定杆、两根长连杆、两根第一短连杆和两根第二短连杆;
技术总结
本发明提出一种腹部推拿机器人,包括固定架、按摩头、支撑导轨、轴向驱动机构、推杆驱动机构和直线驱动机构;轴向驱动机构固定于固定架上,支撑导轨的一端与轴向驱动机构传动连接;固定架的腹板表面设有槽轨,支撑导轨的另一端顺着槽轨的导向位移;在支撑导轨的两端均设置一组推杆驱动机构;按摩头通过直线驱动机构设于支撑导轨上,在直线驱动机构的带动下顺着支撑导轨的导向位移;本发明的腹部推拿机器人推拿范围可以通过改变固定架表面的槽轨来实现,各驱动组件的配合可以实现按摩头在空间内上下左右前后的各方位调整,按摩角度可调,从而实现各种按摩手法模拟。
技术研发人员:喻洪流,唐心意,石萍,李素姣,孙晨飞,罗振杰
受保护的技术使用者:上海理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!