介入手术系统及血管介入装置的制作方法
本技术涉及医疗手术设备,特别是涉及一种介入手术系统及血管介入装置。
背景技术:
1、对于心血管介入手术而言,需要术者穿着铅衣在血管介入手术不同阶段通过注射器注射造影剂、肝素以及通过压力泵注射生理盐水,全程处于辐射环境中。术者操作压力泵时,由于压力泵的最高工作压力为30个大气压,升压时不易操作,而且,升压的同时还得同时关注压力表对应的压力值。在退出球囊时,需要快速多次推拉压力泵推杆,以便球囊回缩至理想退出形状,若球囊回缩状态不理想可能会对血管造成损伤,该环节及其考验术者操作能力。
2、目前的心血管介入操作中,需要术者手动操作压力泵。但是,压力泵由于自身螺纹推进结构设计在手动操作下推进速度有限,升压效率低,且退出球囊时因手动操作不稳定可能导致球囊回缩状态不理想而损伤血管,影响操作过程的安全性。
技术实现思路
1、基于此,有必要针对目前血管介入操作中术者手动操作压力泵存在的升压效率低与不稳定的问题,提供一种能够自动实现升压与泄压、保证升压效率与稳定性的介入手术系统及血管介入装置。
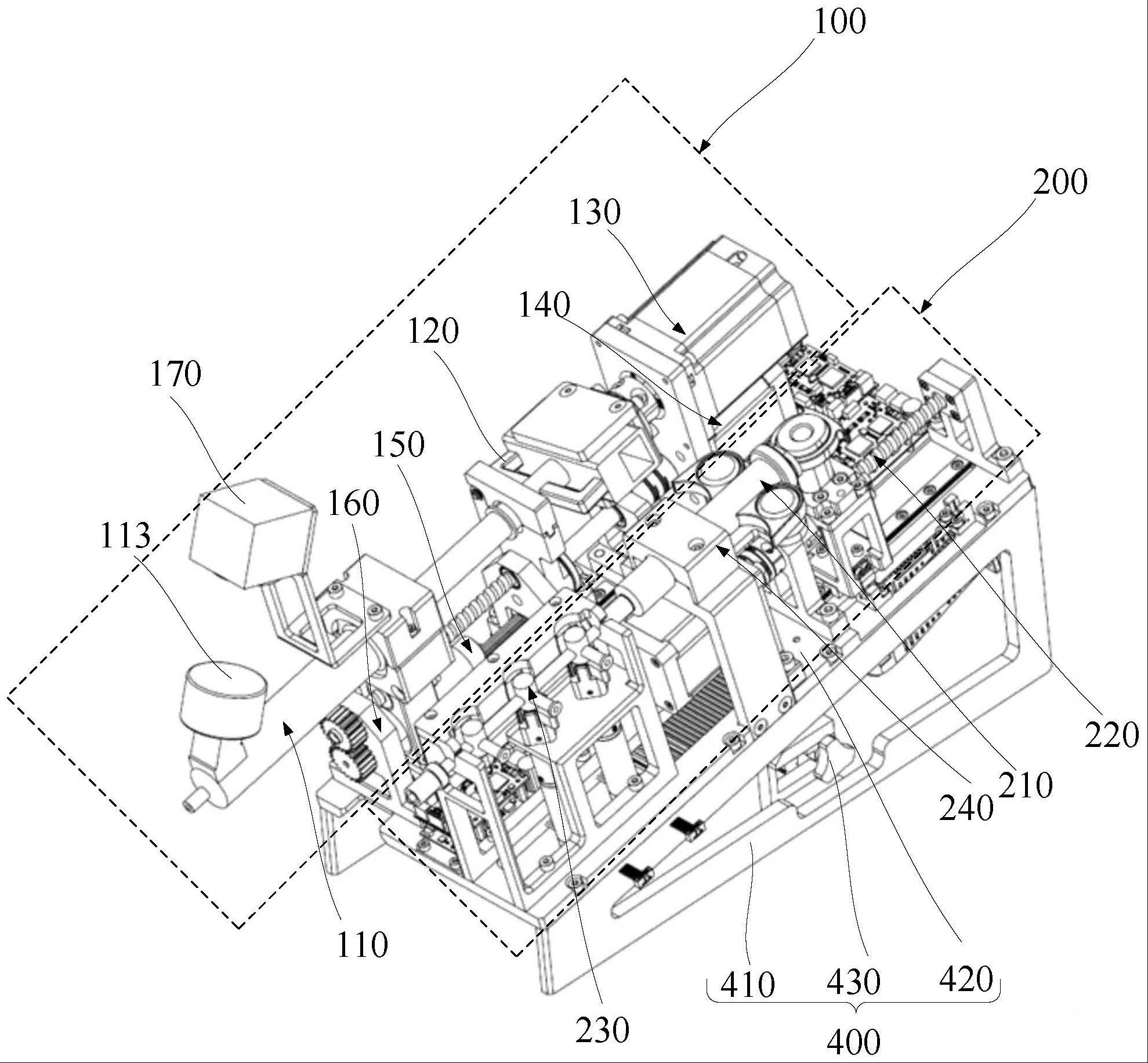
2、一种血管介入装置,包括压力调节结构以及远程控制台;所述压力调节结构包括压力泵以及快速卸压机构;
3、所述快速卸压机构包括解锁把手、第一驱动组件以及第二驱动组件,所述压力泵包括第一筒体以及第一活塞杆,所述第一活塞杆具有局部分布的外螺纹,所述第一筒体具有内螺纹,并与所述外螺纹配合,所述解锁把手设置于所述第一活塞杆,所述第一驱动组件与所述第一活塞杆传动连接,所述第二驱动组件与所述第一筒体传动连接;
4、所述远程控制台控制连接所述第一驱动组件及所述第二驱动组件,所述第一驱动组件驱动第一活塞杆带动所述解锁把手解锁,使所述第一筒体的内螺纹与所述第一活塞杆的外螺纹相分离,以解锁所述第一筒体与所述第一活塞杆,使所述第一筒体内的压强置零;所述第二驱动组件驱动所述第一筒体相对于所述第一活塞杆往复移动,以进行快速卸压。
5、在本技术的一实施例中,所述第一活塞杆包括主体杆以及活动杆,所述主体杆沿轴向方向具有开口,所述活动杆活动设置于所述开口中,所述活动杆连接所述解锁把手,并由所述解锁把手驱动相对于所述主体杆径向运动,所述活动杆的外壁具有所述外螺纹;
6、所述解锁把手锁定时,所述活动杆的表面与所述主体杆表面共面时,所述外螺纹与所述内螺纹啮合;
7、所述解锁把手解锁时能够带动所述活动杆沿径向向所述主体杆内部运动,所述活动杆凹陷于所述主体杆的表面,所述外螺纹与所述内螺纹相分离。
8、在本技术的一实施例中,所述第一活塞杆还包括复位件,所述复位件连接所述主体杆与所述活动杆,所述复位件的作用力能够使得活动杆在无外力作用下位于所述开口中。
9、在本技术的一实施例中,所述第一驱动组件包括第一驱动件、第一丝杠件以及解锁件,所述解锁件可移动设置于所述第一活塞杆,所述第一丝杠件连接所述第一驱动件与所述解锁件;
10、解锁时,所述第一驱动件能够驱动所述解锁件推动所述解锁把手使所述第一活塞杆脱离所述第一筒体。
11、在本技术的一实施例中,所述第一驱动组件还包括相对设置的第一限位件,所述第一限位件与所述远程控制台电连接,所述第一丝杠件具有第一配合件,所述第一丝杠件带动所述第一配合件在所述第一限位件之间运动,并通过所述第一限位件限位。
12、在本技术的一实施例中,所述第二驱动组件包括第二驱动件、第二丝杠件以及第一夹紧块,所述第一夹紧块夹紧所述第一筒体,所述第二丝杠件连接所述第二驱动件及所述第二丝杠件。
13、在本技术的一实施例中,所述第二驱动组件还包括相对设置的第二限位件,所述第二限位件与所述远程控制台电连接,所述第二丝杠件具有第二配合件,所述第二丝杠件带动所述第二配合件在所述第二限位件之间运动,并通过所述第二限位件限位。
14、在本技术的一实施例中,所述压力调节结构还包括通讯部件,所述通讯部件设置于所述第一筒体,用于显示所述第一筒体中的压力值,所述通讯部件与所述远程控制台电连接。
15、在本技术的一实施例中,所述血管介入装置还包括注射结构,所述注射结构包括注射器、连通机构以及注射驱动机构,所述注射器包括第二筒体与第二活塞杆,所述第二活塞杆可伸缩设置于所述第二筒体,所述第二筒体与所述连通机构连接,所述连通机构外接输液管,所述注射驱动机构与所述远程控制台电连接,所述远程控制台控制所述注射驱动机构驱动所述第二活塞杆运动,使所述连通机构实现注射操作。
16、在本技术的一实施例中,所述注射驱动机构包括第四驱动件、第三丝杠件以及连接件,所述连接件设置于所述第二活塞杆的端部,所述第三丝杠件连接所述连接件与所述第四驱动件。
17、在本技术的一实施例中,所述注射驱动机构还包括相对设置的第三限位件,所述第三限位件与所述远程控制台电连接,所述第三丝杠件具有第三配合件,所述第三丝杠件带动所述第三配合件在所述第三限位件之间运动,并通过所述第三限位件限位。
18、在本技术的一实施例中,所述连通机构包括压紧块、三联三通阀、第五驱动件以及第六驱动件,所述三联三通阀通过所述压紧块定位,所述三联三通阀包括第一阀门、第二阀门以及第三阀门,所述第一阀门用于连接血压监测仪,所述第二阀门用于输送肝素,所述第三阀门用于输送造影剂,所述第五驱动件与所述第二阀门连接,用于控制所述第二阀门的通断,所述第六驱动件与所述第三阀门连接,用于控制所述第三阀门的通断。
19、在本技术的一实施例中,所述血管介入装置还包括安装支架,所述注射结构及所述压力调节结构设置于所述安装支架;
20、所述安装支架包括相对设置的支撑侧板与支撑顶板,所述支撑侧板与所述支撑顶板连接,所述支撑顶板相对于水平面倾斜设置。
21、在本技术的一实施例中,所述安装支架还包括夹持机构,所述夹持机构设置于所述支撑侧板,并可拆卸地夹持于手术台车的侧面;
22、所述夹持机构包括支撑座、调节旋钮、第四丝杠件以及两个夹块,两个所述夹块相对设置在所述支撑座,所述调节旋钮设置于所述第四丝杠件,所述第四丝杠件连接所述夹块,并驱动至少一夹块运动,使两个所述夹块夹持或松开。
23、一种介入手术系统,包括介入手术机器人、手术台车以及如上述任一技术特征所述的血管介入装置,所述介入手术机器人位于所述手术台车的侧面,用于执行介入操作,所述血管介入装置放置于所述手术台车或装夹于所述手术台车的侧面。
24、采用上述技术方案后,本技术至少具有如下技术效果:
25、本技术的介入手术系统及血管介入装置,在该血管介入装置中,压力调节结构通过压力泵与快速卸压机构的配合控制球囊泄压与收缩,压力泵的第一活塞杆设置在第一筒体中,第一活塞杆的外壁具有局部分布的外螺纹,第一筒体具有内螺纹。快速卸压结构的第一驱动组件与第一活塞杆传动连接,第二驱动组件与第一筒体传动连接,解锁把手设置于第一活塞杆。压力泵解锁时,远程控制台控制第一驱动组件驱动第一活塞杆带动解锁把手运动,第一活塞杆的外螺纹与第一筒体的内螺纹相分离,以使外螺纹与内螺纹相分离,此时,压力泵中的压力被释放,第一筒体内的压强置零。第二驱动组件驱动第一筒体相对于第一活塞杆往复运动,以对压力泵进行快速卸压,使压力泵控制球囊收缩。远程控制台与第一驱动组件以及第二驱动组件电连接,以实现远程控制压力调节结构对压力泵的动作。
26、该血管介入装置通过第一驱动组件与第二驱动组件的配合实现球囊的退出。退出球囊时,先通过第一驱动组件控制解锁把手解锁第一活塞杆与第一筒体,保证压力泵解锁的稳定性,再通过第二驱动组件控制第一筒体相对于第一活塞杆往复移动,以控制球囊收缩,从而保证球囊收缩至理想状态,以便于球囊退出血管,保证介入操作过程的安全性。而且,通过远程控制台实现压力调节结构的远程控制,无需术者进入手术室,减少术者受到的辐射伤害。
- 还没有人留言评论。精彩留言会获得点赞!