一种医用呼吸机双水平压力转换控制算法的制作方法
本发明属于医用呼吸机压力流量自动控制装置领域,具体说是一种医用呼吸机双水平压力转换控制算法。
背景技术:
1、随着科技的发展,无创呼吸机已经可以做到多种模式,多参数控制了。其中双水平呼吸模式,是临床中最常使用的呼吸模式。
2、在使用双水平呼吸模式时,设备检测到呼气切换点,呼吸机在较短的时间由吸气相转变为呼气相,压力由设定吸气压转变为设定呼气压,压力快速释放,一些厂家的呼吸机将注意点放在了由高压下降到低压时,压力的快速下降,却忽略了压力也需要稳定下降;压力下降过于追求速度则会导致患者肺部的不适,长时间使用患者则会产生呼吸疲劳,影响患者健康的恢复。压力下降时稳定的话则会保护患者肺部的弹性,达到治疗的目的。
3、目前大多数的厂家将注意力放在吸气与呼气压力切换速度上,所以压力稳定下降控制还是有可以调整的空间,所以本发明将解决在呼吸机吸气转变为呼气的过程中压力稳定下降的问题。
技术实现思路
1、本发明目的是提供一种医用呼吸机双水平压力转换控制算法,以克服上述在呼吸机吸气转变为呼气的过程中压力下降不稳定的技术缺陷。
2、本发明为实现上述目的所采用的技术方案是:一种医用呼吸机双水平压力转换控制算法,包括以下步骤:
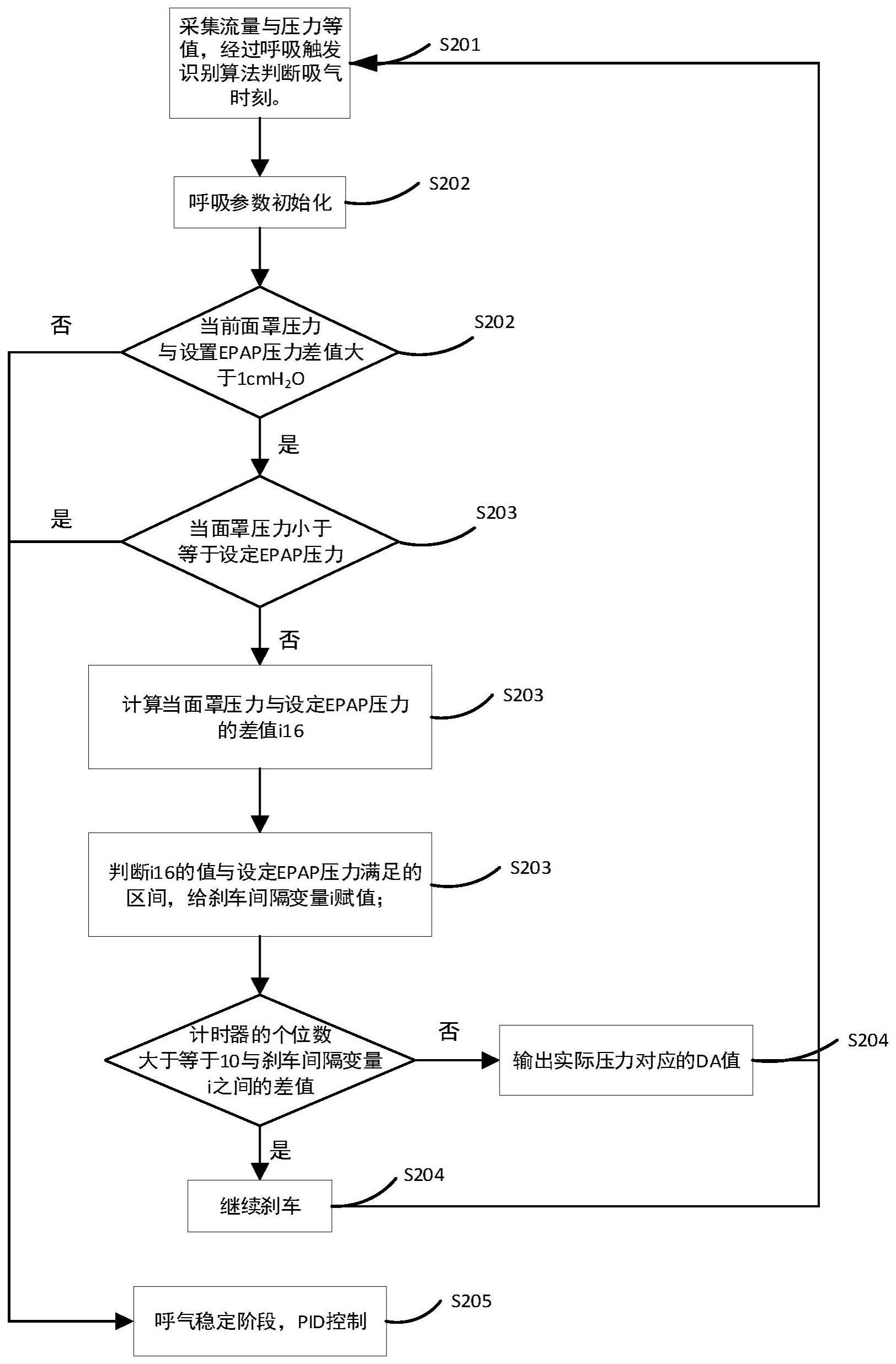
3、s1)通过获取的呼吸机出口端的差压得到呼吸机出口端流量值,进而得到患者的自主呼吸时刻;
4、s2)吸气转为呼气即呼气触发时刻开始,当采集的当前面罩端压力与设定epap压力值的差大于设定误差时,则执行步骤s3);
5、s3)当前面罩压力大于设定epap压力值时,确定刹车间隔变量i的值,执行pwm脉宽调制式刹车方式以使风机运行;
6、s4)进入到呼气压力稳定阶段,即根据设定epap压力值采用闭环控制风机转速。
7、所述通过获取的呼吸机出口端的差压得到呼吸机出口端流量值,进而得到患者的自主呼吸时刻,包括以下步骤:
8、根据呼吸机出口端流量值得到患者的流速参数;
9、根据患者的流速参数得到吸气触发时刻与呼气触发时刻。
10、所述患者的流速参数包括患者的总漏气量、患者端漏气量、患者端流量中的至少一种。
11、步骤s2)中,当采集的当前面罩端压力与设定epap压力值的差小于等于设定误差时,执行步骤s4)。
12、步骤s3)中,当前面罩压力小于等于设定epap压力值时,执行步骤s4)。
13、步骤s3)中,所述确定刹车间隔变量i的值,具体如下:
14、当前面罩压力-设定epap压力值<=1cmh2o,则i=0,
15、当前面罩压力-设定epap压力值>k cmh2o,则i=k;i=1、2,
16、当前面罩压力-设定epap压力值>k cmh2o,且(设定ipap压力值-设定epap压力值)<h cmh2o;则i=h;i=3、…、n,n=9;h为设定数值。
17、步骤s3)中,所述执行pwm脉宽调制式刹车方式,包括以下步骤:
18、记录当前刹车间隔变量i未发生变化的计时器计时数值,判断所述计时数值是否大于等于最大刹车时间阈值与刹车间隔变量i之间的差值;
19、若小于,则以pwm的方式输出控制电信号,通过驱动风机驱动电路令风机工作;
20、否则,输出低电平信号,使风机刹车。
21、一种医用呼吸机双水平压力转换控制系统,包括:
22、流量获取模块,用于通过获取的呼吸机出口端的差压得到呼吸机出口端流量值,进而得到患者的自主呼吸时刻;
23、压力转换模块,用于吸气转为呼气即呼气触发时刻开始,当采集的当前面罩端压力与设定epap压力值的差大于设定误差时,则当前面罩压力大于设定epap压力值时,确定刹车间隔变量i的值,执行pwm脉宽调制式刹车方式以使风机运行;
24、呼气稳定控制模块,用于进入到呼气压力稳定阶段,即根据设定epap压力值采用闭环控制风机转速。
25、一种医用呼吸机双水平压力转换控制装置,包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现一种医用呼吸机双水平压力转换控制算法。
26、一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现一种医用呼吸机双水平压力转换控制算法。
27、本发明应用于一种医用呼吸机空氧混合装置,包括第一壳体、第二壳体和风机组件,其中第一壳体内设有上导流通道和上腔体,第二壳体内设有下导流通道和下腔体,第一壳体与第二壳体密封连接,并且所述上导流通道与下导流通道对应衔接形成折弯的空氧混合进气通道,第一壳体上设有氧气进气口与所述上导流通道连通,第二壳体上设有空气进气口与所述下导流通道连通,所述上腔体和下腔体对应衔接形成容置腔,并且风机组件设于所述容置腔中,所述容置腔设有腔体进气口与所述空氧混合进气通道连通,并且所述空氧混合进气通道的输出端设有流量检测元件,所述腔体进气口设有氧浓度传感器,所述容置腔设有腔体出气口,所述第二壳体设有壳体出气口,且所述腔体出气口与壳体出气口连通。
28、所述风机组件包括风机、第三壳体和第四壳体,其中第三壳体和第四壳体密封连接形成风机仓,且所述风机仓设于所述容置腔中,风机设于所述风机仓中,所述第三壳体上设有风机仓进气口与所述容置腔内部连通,所述风机上设有风机进气口和风机出气口,且所述风机出气口伸出风机仓后与所述腔体出气口连接。
29、所述风机设于一个风机托上,所述风机托下侧设有风机托支腿,所述第四壳体内设有与所述风机托支腿配合的风机托固定柱。
30、所述流量检测元件包括气阻组件和压差传感器,其中所述气阻组件包括气阻网格和设于所述气阻网格上的第一连通口和第二连通口,所述空氧混合进气通道的输出端设有气阻卡槽,所述气阻网格安装在所述气阻卡槽上,并且第一连通口和第二连通口分别设于气阻卡槽两侧,所述压差传感器设于第一壳体上,并且所述压差传感器上设有压力第一检测口和压力第二检测口,其中压力第一检测口与所述第一连通口连接,压力第二检测口与所述第二连通口连接。
31、所述容置腔的腔体进气口设有安装所述氧浓度传感器的氧浓度传感器卡槽。所述第二壳体上设有出气腔,且所述容置腔的腔体出气口和所述壳体出气口均与所述出气腔连通。所述第一壳体上设有第一氧气进气口和第二氧气进气口。述第一壳体和第二壳体之间设有壳体密封件。所述腔体出气口和壳体出气口与所述壳体密封件一体设置。
32、本发明具有以下有益效果及优点:
33、1.通过实际面罩压力与呼气压力设定值的差值和呼气压力设定值联合判断pwm脉宽调制式刹车刹车间隔变量的值,使压力在由吸气相转变到呼气相的时候,压力能够快速稳定的下降。
34、2.由于从风机直接吹出来的气流不具有稳定性,所以本发明使得从风机仓出口(即本实施例使用的空氧混合装置中壳体出气口18)吹出来的气体是流畅的气流;并且在此基础上设计了自动调整pwm脉宽频率与自动调整pwm占空比的方法在压力下降的情况下刹车控制风机,能够更加自如的调整压力下降的稳定程度,使压力下降的程度能够满足患者的舒适程度。
- 还没有人留言评论。精彩留言会获得点赞!