一种步态评估方法
本发明涉及光学动作捕捉,具体涉及一种步态评估方法。
背景技术:
1、随着我国社会与经济的发展,老年人占总人口的比例逐年上升。人体机能会随着年龄的增长而逐年下降,下肢运动能力也会随之衰退,这会对老年人的日常生活造成困扰。根据老年人的下肢运动情况,采集相关的下肢步态运动数据,并对采集的步态运动数据进行分析能够获知其下肢的健康状况。
2、但现有的采集下肢步态运动数据的方法精确性低,而且,根据步态运动数据评估分析下肢健康状况的评估方法繁琐且主观性较强,很难准确反映人的下肢身体健康状况。因此,亟需研究一种快速获取被测人员下肢步态运动数据并根据步态运动数据准确评估下肢运动健康状况的步态评估方法。
技术实现思路
1、针对现有技术中存在的问题和不足,本发明的目的旨在提供一种步态评估方法。
2、为实现发明目的,本发明采用的技术方案如下:
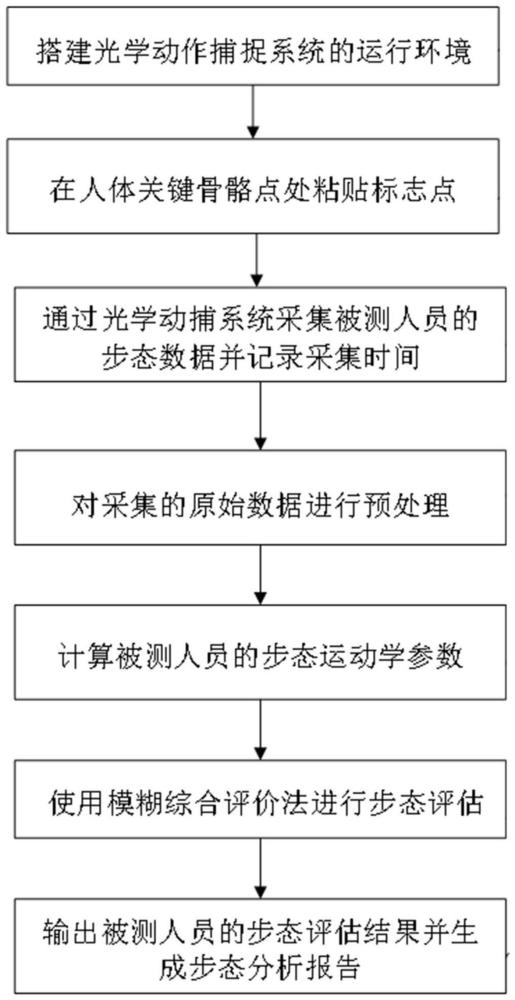
3、本发明提供了一种基于光学动作捕捉技术的步态评估方法,包括以下步骤:
4、s1、在被测人员人体的关键骨骼点粘贴标志点;以被测人员行进方向为x轴,以垂直于水平地面的方向为y轴,以水平地面垂直于x轴的方向为z轴,建立空间坐标系;利用动捕相机采集被测人员自由行走时的步态数据;
5、s2、对采集到的步态数据进行预处理;
6、s3、根据预处理后的步态数据计算被测人员的步态运动学参数;
7、s4、以所述步态运动学参数作为评价指标因素,采用模糊综合评价法评估被测人员步态,得到步态评估结果。
8、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,步骤s1中,所述关键骨骼点至少包括髋关节、膝关节、踝关节、足跟以及足尖;所述步态数据至少包括被测人员自由行走过程中各时刻的髋关节标志点、膝关节标志点、踝关节标志点、足跟标志点和足尖标志点的三维空间位置坐标。
9、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,步骤s2中,所述预处理是首先对原始数据进行滤波处理,消除噪声,然后采用线性差值对有缺失的步态数据进行修复。。
10、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,当第n时刻被测人员膝关节标志点位置坐标缺失时,采用线性差值对该步态数据进行修复的具体过程是:
11、s201:设q1、q2、q3分别表示第n-2时刻、第n-1时刻、第n时刻被测人员一侧膝关节标志点的位置坐标,p1、p2、p3分别表示第n-2时刻、第n-1时刻、第n时刻被测人员同侧踝关节标志点的位置坐标,表示被测人员踝关节标志点由第n-2时刻到第n-1时刻的平移运动,表示被测人员踝关节标志点由第n-1时刻到第n时刻的平移运动;
12、s202:根据第n-2时刻、第n-1时刻被测人员一侧膝关节标志点的位置坐标q1、q2以及被测人员踝关节标志点由第n-2时刻到第n时刻的平移运动,计算被测人员膝关节标志点经过第n-2时刻到第n-1时刻平移运动后的位置坐标q'2和经过第n-1时刻到第n时刻平移运动后的位置坐标q'3,其中,位置坐标q'2的计算公式如式1所示:
13、
14、位置坐标q'3的计算公式如式2所示:
15、
16、s203:根据位置坐标q'3和旋转运动计算被测人员行走过程中第n时
17、刻膝关节标志点位置坐标q3,位置坐标q3的计算公式如式3所示:
18、
19、同理,当踝关节标志点第n时刻的位置坐标缺失时,利用所述踝关节标志点第n-2时刻、第n-1时刻的位置坐标和膝关节标志点第n-2至第n时刻的位置坐标计算所述踝关节标志点第n时刻缺失的位置坐标。
20、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,步骤s3中,所述步态运动学参数包括时间参数和空间参数,所述时间参数包括步态周期、摆动时间、支撑时间、步速和步频,所述空间参数包括步长、步幅和下肢关节旋转角度,所述下肢关节包括髋关节、膝关节和踝关节。
21、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,步骤s3中,所述步态运动学参数的计算方法具体为:
22、s301:根据预处理后的步态数据,分别建立左右足跟、足尖标志点的y坐标时间-距离曲线图、x坐标时间-距离曲线图,根据y坐标时间-距离曲线图和x坐标时间-距离曲线图计算被测人员足跟着地点位置坐标和足尖离地点位置坐标;
23、s302:根据被测人员足跟着地点位置坐标和足尖离地点位置坐标计算所述步态运动学参数;其中,所述步态周期的计算公式如式4所示:
24、tcycle=tdown(n)-tdown(n-1) 式4
25、式4中,tcycle表示步态周期,tcycle表示步态周期,tdown(n)、tdown(n-1)分别表示同一侧足跟第n次、第n-1次着地时刻;
26、所述摆动时间的计算公式如式5所示:
27、tsway=tdown(n)-tup(n) 式5
28、式5中,tsway表示摆动时间,tdown(n)表示同一侧足跟第n次着地时刻,tup(n)表示同一侧足尖第n次离地时刻;
29、所述支撑时间的计算公式如式6所示:
30、tsup p ort=tup(n)-tdown(n-1) 式6
31、式6中,tsup p ort表示支撑时间,tup(n)表示一侧足尖第n次离地时刻,tdown(n-1)表示同侧足跟第n-1着地时刻;
32、所述步长包括左步长和右步长,以x轴方向为前进方向,所述左步长计算公式如式7所示,所述右步长的计算公式如式8所示:
33、lieftstep=|xleft(n)-xright(n)| 式7
34、lrighstep=|xright(n)-xleft(n-1)| 式8
35、式7、式8中,lleftstep表示左步长,lrighstep表示右步长,xleft(n)表示左脚足跟着地点的x轴坐标,xright(n-1)表示右脚第n-1次着地的x轴坐标;
36、步幅包括左步幅和右步幅,所述左步幅的计算公式如式9所示,所述右步幅的计算公式如式10所示:
37、lleftstride=|xleft(n)-xleft(n-1)| 式9
38、lrightstride=|xrightt(n)-xright(n-1)| 式10
39、式9、式10中,lleftstride表示左步幅,lrightstride表示右步幅,xleft(n)表示左脚第n次着地的x轴坐标,xleft(n-1)表示左脚第n-1次着地的x轴坐标;
40、所述步速的计算公式为:步速=步长×步频;步频指单位时间内人体行走的步数;
41、将髋关节标志点记为p0,一侧膝关节、踝关节、足跟、足尖标志点依次记为p1’、p2’、p3’、p4’,另一侧髋关节、踝关节、足跟、足尖标志点依次记为p1、p2、p3、p4,通过正切定理求解髋关节标志点、膝关节标志点及踝关节标志点的旋转角度,其中,一侧的髋关节标志点旋转角度θh的计算公式如式11所示,膝关节标志点旋转角度θk计算公式如式12所示,踝关节标志点旋转角度θa计算公式如式13所示;同理计算另一侧关节角度;
42、
43、
44、
45、其中,xp1′表示标志点p1’的x轴坐标,表示标志点p0的x轴坐标,yp1′表示标志点p1’的y轴坐标,表示标志点p0的y轴坐标,xp2′表示标志点p2’的x轴坐标,yp2′标志点p2’的y轴坐标,p1′p2′表示标志点p1′到标志点p2′的直线距离,p2′p4′表示标志点p2′到标志点p4′的直线距离,p1′p4′表示标志点p1′到标志点p4′的直线距离。
46、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,步骤s301中,根据y坐标时间-距离曲线图和x坐标时间-距离曲线图计算被测人员足跟着地点位置坐标和足尖离地点位置坐标的方法为:
47、将足跟标志点在y坐标轴上的极小值点记为足跟着地点,将足尖标志点在y坐标轴上的极小值点记为足尖离地点,然后从x坐标时间-距离曲线图找到足跟着地点、足尖离地点对应的x轴坐标即可得到被测人员足跟着地点位置坐标和足尖离地点位置坐标。
48、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,采用模糊综合评价法评估被测人员步态的具体流程为:
49、s401:将所述评价指标因素按时间参数、空间参数分为两组,分别为u1、u2,其中,u1={u1,u2,u3,u4,u5},u2={u6,u7,u8},u1为步态周期,u2为摆动时间,u3为支撑时间,u4为步速,u5为步频,u6为步长,u7为步幅,u8为下肢关节角度;
50、s402:设定评语集v={v1,v2,v3,v4,v5},其中,v1为正常,v2为一般,v3为较差,v4很差,v5为非常差;
51、s403:对ui(i=1,2)中的评价指标因素进行单因素评价,根据熵权法设计ui(i=1,2)中评价指标因素权重集ai(i=1,2),根据所述评价指标因素与健康人的评价指标因素正常参数范围的差距构建ui(i=1,2)中评价指标因素的单因素评价矩阵ri=[ri1,ri2,ri3,ri4,ri5](i=1,2);所述单因素评价矩阵ri指的是只考虑ui这个指标时,该评价指标因素有ri1概率为正常,有ri2概率为一般,有ri3概率为较差,有ri4概率为很差,有ri5概率为非常差;
52、s404:将评价指标因素权重集ai和单因素评价矩阵ri输入模型m=(∧,v)中,计算评价指标因素的一级模糊综合评价bi,表示模型m=(∧,v)计算;
53、s405:对第一级因素u={u1,u2},根据德尔菲法设置权重a={a′1,a′2},令总单因素评判矩阵为作为二级模糊综合评价,得其中,表示模型m=(∧,v)计算;然后根据最大隶属原则最终判定被测人员步态参数的评价为正常、一般、较差、很差或非常差。
54、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,根据熵权法设计权重的具体操作为:
55、以评价指标因素集u1为例,对于n个受试者,将n个受试者u1、u2、u3、u4、u5这五个指标因素的实验数据组成一个n×5的矩阵x,矩阵x中每一行代表一个受试者的实验数据;
56、对矩阵x进行标准化处理,使得所有受试者的数据尺度相同;标准化处理的计算公式如式14所示:
57、
58、其中,zij是标准化后的数据,xij是原始数据,mean(xi)和std(xi)分别是第i列数据的均值和标准差;
59、对任意一个指标因素j,利用式15计算指标因素j的熵值ej,然后利用式16根据熵值ej计算相对熵hj:
60、
61、
62、其中,n为受试者的数量;
63、利用式17计算指标因素j的权重aj:
64、
65、根据上述计算步骤,可以得到五个指标因素u1、u2、u3、u4、u5对应的权重值a1,a2,a3,a4,a5。由此得到的权重集ai反映了每个指标对于步态结果的相对重要性,权重越大表示该指标对于步态结果的贡献越大。同理可求出因素集u2对应的权重值a6,a7,a8。。
66、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,根据德尔菲法设置权重的具体操作为:
67、a、根据评估目标选择30-50位医学领域康复科的专家对被测人员评价指标因素集u1、u2的权重进行至少一轮意见征询并设置u1的权重a′1i、u2的权重a′2i,每位专家每轮设置权重时,a′1i与a′2i之和为1;
68、b、对专家第一轮设置的u1的权重a′1i、u2的权重a′2i进行统计,求出u1的平均权重u2的平均权重其中,u1的平均权重的计算公式如式18所示,u2的平均权重的计算公式如式19所示;
69、
70、
71、其中,a′1i表示第i个专家提供的u1的权重,a′2i是第i个专家提供的u2的权重,n是专家数量;
72、c、为确保u1的权重和u2的权重之和为1,分别对u1的平均权重u2的平均权重进行归一化处理,得到归一化权重,其中,u1的平均权重的计算公式如式20所示,u2的平均权重计算公式如式21所示;
73、
74、
75、其中,a′1表示u1归一化后的权重,a′2表示u2归一化后的权重;
76、d、将u1归一化后的权重a′1、u2归一化后的权重a′2反馈给每位专家,若所有专家对u1归一化后的权重a′1、u2归一化后的权重a′2达成一致,结束意见征询,并将u1归一化后的权重a′1、u2归一化后的权重a′2分别作为u1、u2的最终权重;若所有专家对u1归一化后的权重a′1、u2归一化后的权重a′2未达成一致,重复步骤a-c,直至所有专家对u1归一化后的权重a′1、u2归一化后的权重a′2达成一致。
77、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,根据德尔菲法设置权重时,所述专家的选择标准由专家权威系数q决定,权威系数q的计算公式如式22所示,权威系数q介于0~1之间,一般认为专家权威系数q≥0.7即认为研究结果可靠;
78、
79、其中,q1表示专家的学术水平,所述学术水平由专家的技术职称决定,专家技术职称为高级时,q1取值为1,专家技术职称为副高级时,q1取值为0.9,专家技术职称为中级时,q1取值为0.8;q2表示专家做出权重判断的依据,q2取值依据专家依据判断依据量化表进行评分;q3表示专家对内容的熟悉程度,专家对内容非常熟悉、比较熟悉、一般熟悉、步态熟悉、不熟悉时,q3的取值分别为1、0.8、0.6、0.4、0.2。
80、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,根据德尔菲法设置权重时,专家意见是否达成一致由专家共识程度判断;所述专家共识程度由专家意见协调系数w来表示,其取值范围为0~1,一般认为专家意见协调系数w≥0.40即表示专家意见达成一致;专家意见协调系数w计算步骤如下:
81、首先对来自每个专家设置的u1、u2权重值进行排秩(次序),然后分别计算u1、u2的秩总和ri及平均秩最后根据公式23、式24计算专家意见协调系数w;
82、
83、
84、其中,n表示被评的指标数;k表示专家人数;s表示每个指标因素的秩总和ri及平均秩的离差平方和。
85、根据上述的基于光学动作捕捉技术的步态评估方法,优选地,所述基于光学动作捕捉技术的步态评估方法还包括输出被测人员的步态评估结果并生成步态分析报告的步骤。其中,所述步态分析报告包含被测人员的步态参数及评估结果,所述步态参数可通过曲线图、柱状图、棍状图等形式进行可视化,能够有效地帮助康复医师直观地了解患者的患病程度或康复进程。
86、与现有技术相比,本发明取得的积极有益效果如下:
87、(1)本发明通过光学动作捕捉技术获知被测人员骨骼关键点(如髋关节、膝关节、踝关节、足跟以及足尖)的具体三维位置坐标,数据测量精准,而且利用算法计算行走时的步态参数,然后基于步态参数利用模糊综合评价进行步态评估。本发明的步态评估方法不仅可以提供精准的步态数据,还可以利用所述的数据快捷高效地计算步态参数并进行步态评估,极大地提高步态检测及评估的效率和准确性,极大地方便患者和医师进行后续的康复训练规划。
88、(2)本发明对采集的被测人员的步态数据进行预处理,对大量缺失样本点的数据进行丢弃,对少量缺失样本点的数据使用线性插值法进行修复,再进一步对数据进行滤波处理,保证采集到的步态信息具有可用性与准确性。利用本发明提供的算法能够基于处理好的数据自动计算步态参数,为后续步态评估提供可靠的依据。
89、(3)本发明利用模糊综合评价法对被测人员的步态参数进行评估,可以高效地对被测人员进行健康与患病的区分,还可以对患病程度进行进一步分级,解决了传统量表评估的主观性与低效性的问题。
- 还没有人留言评论。精彩留言会获得点赞!