一种手术导航方法和系统与流程
本技术涉及手术导航,特别是涉及一种手术导航方法和系统。
背景技术:
1、传统的手术方式是通过较大的切口或切开病灶进行手术,带来的手术创伤较大,导致术后疼痛和不适较为明显,恢复时间较长。因此,微创手术得以兴起,其通过微小切口或自然孔道进行手术,可以减轻手术创伤、缩短恢复时长以及减少并发症的发生率等。而如何实现手术工具在术中体位空间的实时导航成为微创手术的关键问题。
2、2d x光机(c/o/g型臂)是手术过程中常用的辅助设备,目前基于2d x光机扫描的图像进行导航的方式,需要在手术操作环境中固定标定装置进行术前标定,完成标定后需要在患者身上固定较为冗余的光学参考架,用于术中手术工具的追踪定位。由于标定过程较为繁琐,会影响临床手术时间,且冗余的光学参考架会影响临床医生的操作空间和手术视野。
3、因此,现有技术中还存在导航不够便捷的问题。
技术实现思路
1、基于此,提供一种手术导航方法和系统,以改善现有技术中导航不够便捷的问题。
2、第一方面,提供一种手术导航方法,所述方法包括:
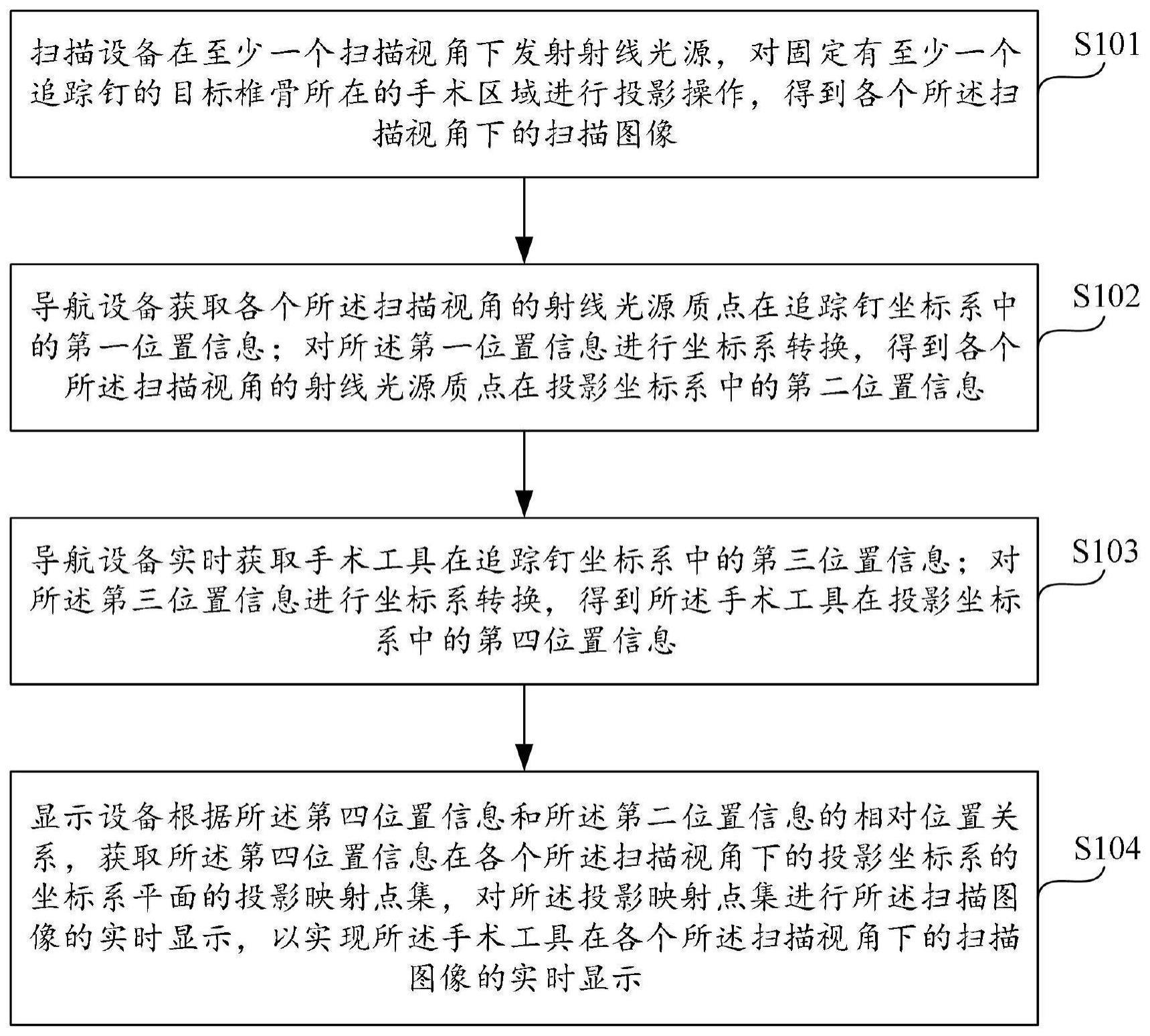
3、扫描设备在至少一个扫描视角下发射射线光源,对固定有至少一个追踪钉的目标椎骨所在的手术区域进行投影操作,得到各个所述扫描视角下的扫描图像;
4、导航设备获取各个所述扫描视角的射线光源质点在追踪钉坐标系中的第一位置信息;对所述第一位置信息进行坐标系转换,得到各个所述扫描视角的射线光源质点在投影坐标系中的第二位置信息;其中,所述射线光源质点是指将所述射线光源视为质点,所述投影坐标系是以所述扫描设备的射线接收板的平面为坐标系平面建立的;
5、导航设备实时获取手术工具在追踪钉坐标系中的第三位置信息;对所述第三位置信息进行坐标系转换,得到所述手术工具在投影坐标系中的第四位置信息;
6、显示设备根据所述第四位置信息和所述第二位置信息的相对位置关系,获取所述第四位置信息在各个所述扫描视角下的投影坐标系的坐标系平面的投影映射点集,对所述投影映射点集进行所述扫描图像的实时显示,以实现所述手术工具在各个所述扫描视角下的扫描图像的实时显示。
7、结合第一方面,在第一方面的第一种可实施方式中,导航设备获取各个所述扫描视角的射线光源质点在追踪钉坐标系中的第一位置信息的步骤,包括:
8、若所述追踪钉的类型为电磁追踪钉,根据所述电磁追踪钉和参考架的电磁传感器分别在电磁发生器产生的电磁场中运动时生成的电动势,计算电磁追踪钉坐标系与参考架坐标系之间的第一转换矩阵;
9、获取各个所述扫描视角的射线光源质点在所述参考架坐标系中的第五位置信息;
10、根据所述第一转换矩阵的逆矩阵和所述第五位置信息的乘积,得到各个所述扫描视角的射线光源质点在所述电磁追踪钉坐标系中的第一位置信息;
11、若所述追踪钉的类型为光学追踪钉,通过光学相机获取各个所述扫描视角的射线光源质点在光学相机坐标系中的第六位置信息;
12、根据所述光学追踪钉上的光学球分别在光学追踪钉坐标系和所述光学相机坐标系中的位置信息,计算所述光学追踪钉坐标系和所述光学相机坐标系之间的第二转换矩阵;
13、根据所述第二转换矩阵的逆矩阵和所述第六位置信息的乘积,得到各个所述扫描视角的射线光源质点在所述光学追踪钉坐标系中的第一位置信息。
14、结合第一方面的第一种可实施方式,在第一方面的第二种可实施方式中,获取各个所述扫描视角的射线光源质点在所述参考架坐标系中的第五位置信息的步骤,包括:
15、通过光学相机获取各个所述扫描视角的射线光源质点在光学相机坐标系中的第六位置信息;
16、根据所述参考架上的光学球分别在所述参考架坐标系和所述光学相机坐标系中的位置信息,计算所述参考架坐标系和所述光学相机坐标系之间的第三转换矩阵;
17、根据所述第三转换矩阵的逆矩阵和所述第六位置信息的乘积,得到各个所述扫描视角的射线光源质点在所述参考架坐标系中的第五位置信息。
18、结合第一方面的第二种可实施方式,在第一方面的第三种可实施方式中,通过光学相机获取各个所述扫描视角的射线光源质点在光学相机坐标系中的第六位置信息的步骤,包括:
19、通过射线光源追踪器对各个所述扫描视角的射线光源质点进行追踪和定位,获得各个所述扫描视角的射线光源质点在射线光源追踪器坐标系中的第七位置信息;
20、根据所述射线光源追踪器上的光学球分别在所述射线光源追踪器坐标系和所述光学相机坐标系中的位置信息,获得所述射线光源追踪器坐标系与所述光学相机坐标系之间的第四转换矩阵;
21、根据所述第七位置信息和所述第四转换矩阵的乘积,获得各个所述扫描视角的光源质点集合在所述光学相机坐标系中的第六位置信息。
22、结合第一方面的第一种可实施方式,在第一方面的第四种可实施方式中,对所述第一位置信息进行坐标系转换,得到各个所述扫描视角的射线光源质点在投影坐标系中的第二位置信息;对所述第三位置信息进行坐标系转换,得到所述手术工具在投影坐标系中的第四位置信息的步骤,包括:
23、若所述追踪钉的类型为电磁追踪钉,获取所述投影坐标系与所述参考架坐标系之间的第五转换矩阵;
24、根据所述第一转换矩阵的逆矩阵和所述第五转换矩阵的乘积,得到所述投影坐标系与所述电磁追踪钉坐标系之间的第六转换矩阵;
25、根据所述第六转换矩阵的逆矩阵和所述第一位置信息的乘积,得到各个所述扫描视角的射线光源质点在所述投影坐标系中的第二位置信息;
26、根据所述第六转换矩阵的逆矩阵和所述第三位置信息的乘积,得到所述手术工具在所述投影坐标系中的第四位置信息;
27、若所述追踪钉的类型为光学追踪钉,获取所述投影坐标系与所述光学追踪钉坐标系之间的第七转换矩阵;
28、根据所述第七转换矩阵的逆矩阵和所述第一位置信息的乘积,得到各个所述扫描视角的射线光源质点在所述投影坐标系中的第二位置信息;
29、根据所述第七转换矩阵的逆矩阵和所述第三位置信息的乘积,得到所述手术工具在所述投影坐标系中的第四位置信息。
30、结合第一方面的第四种可实施方式,在第一方面的第五种可实施方式中,获取所述投影坐标系与所述参考架坐标系之间的第五转换矩阵;获取所述投影坐标系与所述光学追踪钉坐标系之间的第七转换矩阵的步骤,包括:
31、根据所述参考架上的光学球分别在所述参考架坐标系和所述光学相机坐标系中的位置信息,计算所述参考架坐标系和所述光学相机坐标系之间的第三转换矩阵;
32、获取所述投影坐标系与所述光学相机坐标系之间的第八转换矩阵;
33、根据所述第三转换矩阵的逆矩阵和所述第八转换矩阵的乘积,得到所述投影坐标系与所述参考架坐标系之间的第五转换矩阵;
34、获取所述投影坐标系与所述光学相机坐标系之间的第八转换矩阵以及所述光学追踪钉坐标系和所述光学相机坐标系之间的第二转换矩阵;
35、根据所述第八转换矩阵和所述第二转换矩阵的乘积,得到所述投影坐标系与所述光学追踪钉坐标系之间的第七转换矩阵。
36、结合第一方面的第五种可实施方式,在第一方面的第六种可实施方式中,获取所述投影坐标系与所述光学相机坐标系之间的第八转换矩阵的步骤,包括:
37、根据射线接收板追踪器上的光学球分别在射线接收板追踪器坐标系和所述光学相机坐标系中的位置信息,计算所述射线接收板追踪器坐标系和所述光学相机坐标系之间的第九转换矩阵;
38、获取预先标定好的所述投影坐标系与所述射线接收板追踪器坐标系之间的第十转换矩阵;
39、根据所述第九转换矩阵和所述第十转换矩阵的乘积,得到所述投影坐标系与所述光学相机坐标系之间的第八转换矩阵。
40、结合第一方面的第一种可实施方式,在第一方面的第七种可实施方式中,导航设备实时获取手术工具在追踪钉坐标系中的第三位置信息的步骤,包括:
41、当所述追踪钉的类型为电磁追踪钉且所述手术工具的类型为光学工具时,通过光学相机实时获取所述光学工具在光学相机坐标系中的第八位置信息;
42、根据所述参考架上的光学球分别在所述参考架坐标系和所述光学相机坐标系中的位置信息,计算所述参考架坐标系和所述光学相机坐标系之间的第三转换矩阵;
43、根据所述第一转换矩阵的逆矩阵、所述第三转换矩阵的逆矩阵以及所述第八位置信息的乘积,获得所述光学工具在所述电磁追踪钉坐标系中的第三位置信息;
44、当所述追踪钉的类型为光学追踪钉且所述手术工具的类型的光学工具时,通过光学相机实时获取所述光学工具在光学相机坐标系中的第八位置信息;
45、根据所述第八位置信息和所述第二转换矩阵的乘积,获得所述光学工具在光学追踪钉坐标系中的第三位置信息。
46、结合第一方面的第一种可实施方式,在第一方面的第八种可实施方式中,导航设备实时获取手术工具在追踪钉坐标系中的第三位置信息的步骤,包括:
47、当所述追踪钉的类型为电磁追踪钉且所述手术工具的类型为电磁工具时,获取所述电磁工具在电磁发生器坐标系中的第九位置信息;
48、根据所述参考架上的电磁传感器在电磁发生器产生的电磁场中生成的电动势,计算参考架坐标系与电磁发生器坐标系之间的第十一转换矩阵;
49、根据所述第一转换矩阵的逆矩阵、所述第十一转换矩阵的逆矩阵和所述第九位置信息的乘积,获得所述电磁工具在所述电磁追踪钉坐标系中的第三位置信息。
50、第二方面,提供了一种手术导航系统,所述系统包括:
51、扫描设备,用于在至少一个扫描视角下发射射线光源,对固定有至少一个追踪钉的目标椎骨所在的手术区域进行投影操作,得到各个所述扫描视角下的扫描图像;
52、导航设备,用于获取各个所述扫描视角的射线光源质点在追踪钉坐标系中的第一位置信息;对所述第一位置信息进行坐标系转换,得到各个所述扫描视角的射线光源质点在投影坐标系中的第二位置信息;其中,所述射线光源质点是指将所述射线光源视为质点,所述投影坐标系是以所述扫描设备的射线接收板的平面为坐标系平面建立的;
53、导航设备还用于实时获取手术工具在追踪钉坐标系中的第三位置信息;对所述第三位置信息进行坐标系转换,得到所述手术工具在投影坐标系中的第四位置信息;
54、显示设备,用于根据所述第四位置信息和所述第二位置信息的相对位置关系,获取所述第四位置信息在各个所述扫描视角下的投影坐标系的坐标系平面的投影映射点集,对所述投影映射点集进行所述扫描图像的实时显示,以实现所述手术工具在各个所述扫描视角下的扫描图像的实时显示。
55、上述手术导航方法和系统,通过扫描设备在至少一个扫描视角下发射射线光源,对固定有至少一个追踪钉的目标椎骨所在的手术区域进行至少一次投影操作,得到各个扫描视角下的扫描图像;导航设备获取射线光源质点在追踪钉坐标系中的第一位置信息,并对第一位置信息进行坐标系转换,得到对应在投影坐标系中的第二位置信息,其中,射线光源质点是指将射线光源视为质点,投影坐标系是以扫描设备的射线接收板的平面为坐标系平面建立的;导航设备实时获取手术工具在追踪钉坐标系中的第三位置信息,并对第三位置信息进行坐标系转换,得到手术工具在投影坐标系中的第四位置信息;显示设备根据第四位置信息和第二位置信息的相对位置关系,获取第四位置信息在投影坐标系的坐标系平面的投影映射点集,对投影映射点集实时显示在扫描图像中,从而实现手术工具在各个扫描视角下获得的扫描图像中的实时显示。与现有技术相比,本技术的手术导航方法不需要固定标定装置,省去了术前标定环节,减少了术前准备工作;且不需要在患者身上冗余的光学参考架,只需要固定一个或一个以上小巧的追踪钉,减少了对手术操作空间和手术视野的占用,因此,本技术的手术导航方法改善了现有技术中导航不够便捷的问题。
- 还没有人留言评论。精彩留言会获得点赞!