一种胫骨高位截骨手术的图像配准与导航方法与流程
本发明涉及图像配准领域,具体为一种胫骨高位截骨手术的图像配准与导航方法。
背景技术:
1、胫骨高位截骨手术(hto)通过胫骨高位截骨,撑开胫骨远端与近端间隙的方式,达到矫正下肢力线的目的。hto截骨与撑开角度的准确性,直接影响手术的最终效果。现有手术技术的缺点:1)常规的hto截骨过程中,为了获知摆锯相对于胫骨的入刀方向与深度,需要多次拍摄患者胫骨x光影像,患者与手术操作人员的辐射暴露量较大。2)为确保截骨与间隙撑开角度的准确性,需要借助切割导板、量角器等额外辅助器械,但是借由器械量测所得的间隙数据较为抽象,无法直观体现胫骨远近端的相对位移。
2、有鉴于此,申请人研发使用了影像导航的方式,实现hto术中对切割摆锯与患者胫骨相对位置关系,胫骨近端与远端相对位置关系的实时侦测,从而辅助医生在减少术中x光拍摄的前提下,实施精准截骨与间隙撑开,大幅胫骨高位截骨手术的成功率和有效性。
技术实现思路
1、本发明的目的在于提供一种胫骨高位截骨手术的图像配准与导航方法,以解决上述背景技术中提出的目前在胫骨高位截骨手术(hto)存在的需要多次拍摄患者胫骨x光影像,患者与手术操作人员的辐射暴露量较大和无法直观体现胫骨远近端的相对位移问题。
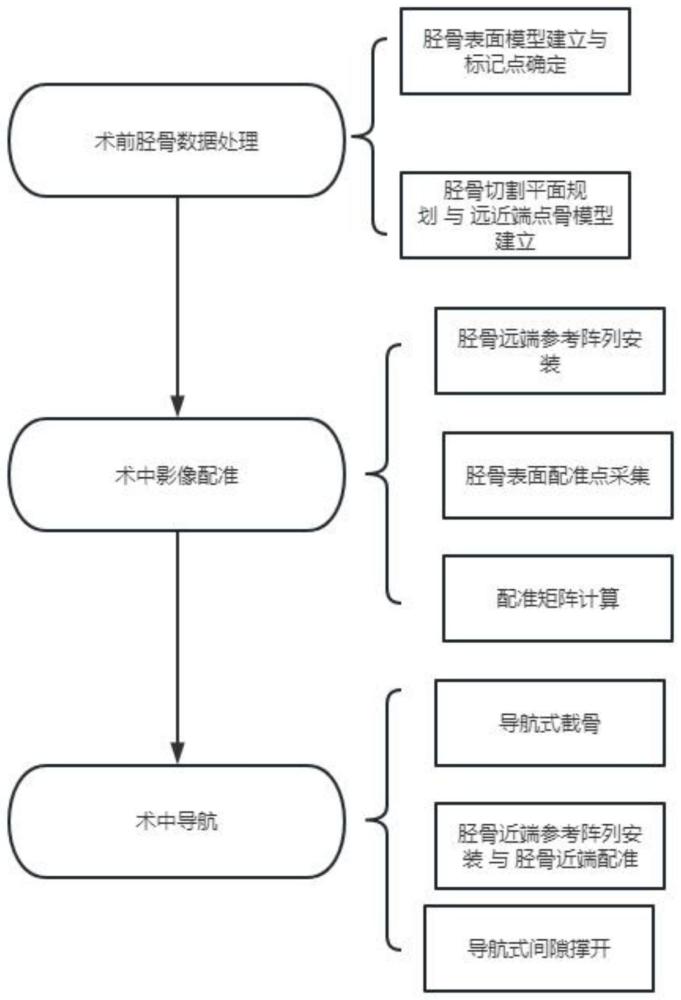
2、为实现上述目的,本发明提供如下技术方案:一种胫骨高位截骨手术的图像配准与导航方法,其特征在于,包括以下步骤:术前胫骨数据处理、术中影像配准和术中导航三个步骤,其中,术前胫骨数据处理包括以下步骤:术前对患者进行包含完整术侧胫骨的ct拍摄,截取胫骨部分的三维影像,在该三维影像的基础上重建胫骨表面模型;在特定图像空间(fimage)中,在胫骨表面模型依次点选多个生理特征点构成有序点集,创建两个切割平面,分别为第一平面和第二平面,将两平面移动至胫骨表面模型的合理位置,其中第一平面切割胫骨粗隆,第二平面切割胫骨远近端,记录移动后第一平面的法向量与平面上任意一点的坐标值,模拟出患者胫骨经过双平面切割后所呈现的状态,胫骨远近端分为两个独立部分,且胫骨粗隆连于胫骨远端;
3、术中影像配准包括以下步骤:在患者胫骨骨干位置,使用骨针刚性固连一光学追踪阵列,其上所附n个反光球(3≤n)构成胫骨远端参考阵列坐标系(frf1),光学定位相机实时侦测光学追踪阵列的位姿,实时输出定位相机坐标系(fcamera)的转换矩阵t,使用上述光学追踪阵列完成胫骨表面多个配准点采集;计算计算胫骨远端参考阵列坐标系至图像坐标系的配准矩阵;
4、术中导航包括以下步骤:摆锯附有一光学追踪阵列,其上所附的反光球构成摆锯局部坐标系fsaw(坐标系建立方法参照frf1),摆锯经过事先校准,锯片的2个前端点p1、p2以及锯片平面的法向量在fsaw下的值为已知值;医生手持摆锯进行截骨的过程中,系统实时获取fcamera至fsaw与frf1的转换矩阵tb与ta,从而将现实空间中锯片与胫骨的位置关系呈现于图像空间中(胫骨在图像中保持静止,锯片在图像中相对胫骨运动),并计算锯片平面与规划截骨平面的角度,锯片前端点(p1、p2的中点)与规划截骨平面的距离,以此辅助医生精确调整摆锯位姿;在胫骨近端使用骨针刚性固连一光学追踪阵列,其上所附n个反光球(3≤n)构成胫骨近端参考阵列坐标系frf2(坐标系建立方法参照frf1),同时获取fcamera至frf1与frf2的转换矩阵分别记为tcameratorf1与tcameratorf2,计算胫骨近端的配准矩trf2toimage;在胫骨撑开的过程中,系统实时获取fcamera至frf1与frf2的转换矩阵记为tc与td,计算其变换矩阵,实时的将该变换矩阵应用于胫骨上任意一点,由此实现将真实的胫骨远近端相对位置关系实时呈现于图像空间,并且使得图像中胫骨远端保持静止,胫骨近端相对于胫骨远端运动。
5、作为一种优选的技术方案,在术前胫骨数据处理步骤中,将重建的胫骨表面模型记为tibia_surface,在图像空间中(图像坐标系fimage下),于tibial_surface表面依次点选五个生理特征点构成有序点集pset_1,依次为外侧关节面中心、外侧髁间结节、内侧髁间结节、内侧关节面中心、胫骨粗隆顶点,其中tibial_surface的数据格式为vtkpolydata,pset_1点集的数据类型为vtkpoints。
6、作为一种优选的技术方案,在胫骨切割平面规划与远近端点骨模型建立步骤中,具体包括以下步骤:
7、1)使用vtkplanesource类创建两个平面vtkpolydata数据plane_1与plane_2用来代表切割平面,将两平面移动至胫骨表面模型的合理位置,其中plane_1切割胫骨粗隆,plane_2切割胫骨远近端,记录移动后plane_1的法向量与平面上任意一点的坐标值分别为为与a1,使用与a1建立一vtkplane类数据cutplane_1;记录移动后plane_1的法向量与平面上任意一点的坐标值分别为与a2,使用与a2建立一vtkplane类数据cutplane_2;
8、2)使用vtkclippolydata方法,将tibia_surface与cutplane_2分别作为其输入与切割函数,得到切割去除与剩下的两份vtkpolydata数据,将所占空间体积较大者记为tibia_l,较小者记为tibia_s。使用vtkfillholesfilter方法封补tibia_l与tibia_s表面因切割而产生的漏洞;
9、3)使用vtkclippolydata方法,将tibia_s与cutplane_1分别作为其输入与切割函数,得到切割去除与剩下的两份vtkpolydata数据,将所占空间体积较大者记为tibia_p,较小者记为tibia_t。使用vtkfillholesfilter方法封补tibia_p与tibia_t表面因切割而产生的漏洞;
10、4)使用vtkappendpolydata方法,合并tibia_t与tibia_l为一个vtkpolydata数据,记为tibia_d。
11、作为一种优选的技术方案,胫骨表面配准点采集步骤中,将探针尖端点在fprobe下的坐标值已知,记为s,获取fcamera至fprobe与frf1的转换矩阵分别为tp与ta,则该胫骨表面点在frf1下的坐标值p可以用下式计算得到:
12、
13、还包括以下步骤:暴露患者胫骨近端,以虚拟图像中胫骨模型与pset_1的相对位置为参考,使用上述探针采集方式依次获得真实患者胫骨表面各个与pset_1对应的点在frf1下的坐标值,构成点集pset_2,使用光学探针采集真实患者胫骨表面若干其他点(除pset_1外任意的表面点,数量大于等于5,且尽量分散)在frf1下的坐标值,构成点集pset_3,点集pset_2和集pset_3的数据类型均为vtkpoints。
14、作为一种优选的技术方案,求解frf1至fimage的转换矩阵trf1toimage还包括以下步骤:
15、4)使用vtklandmarktransform方法类,利用setmodetorigidbody方法将其设置为求解刚体变换模式,将pset_2设为起始标记点集(setsourcelandmarks方法),pset_1设为目标标记点集(settargetlandmarks方法),求解得到的空间变换矩阵记为t1;
16、5)将t1应用于pset_3,对pset_3中的任意一点ai,记其应用t1后的坐标变为bi,则bi可以通过下式得到
17、
18、记pset_3应用t1后得到的新点集为pset_4;
19、6)使用vtkiterativeclosestpointtransform方法类,将pset_4设为起始点云数据(setsource方法),将tibia_surface设为目标点云数据(settarget方法),求解得到的空间变换矩阵记为t2
20、7)计算frf1至fimage的配准矩阵trf1toimage
21、trf1toimage=(t2.t1)-1
22、作为一种优选的技术方案,采用如下公式计算锯片前端点p1与p2在图像中的点坐标q1与q2:
23、
24、
25、采用如下公式计算锯片平面法向量在图像中的表达式
26、
27、采用如下公式计算当前锯片平面与规划切割平面(以规划平面plane_1为例)的夹角θ做为医生截骨时的数值参考:
28、
29、采用如下公式计算锯片前端点与规划截骨平面(以规划平面plane_1为例)的距离d做为医生截骨时的数值参考:
30、
31、与现有技术相比,本发明的有益效果是:
32、该胫骨高位截骨手术的图像配准与导航方法,使用影像导航的方式,实现hto术中对切割摆锯与患者胫骨相对位置关系,胫骨近端与远端相对位置关系的实时侦测,从而辅助医生在减少术中x光拍摄的前提下,实施精准截骨与间隙撑开。
- 还没有人留言评论。精彩留言会获得点赞!