一种基于多模态数据融合的牙根管的识别方法及系统与流程
本发明涉及医疗器械,特别涉及一种基于多模态数据融合的牙根管的识别方法及系统。
背景技术:
1、锥形束ct机是一种锥形束投照计算机重组断层影像设备,简称cbct,其原理是x线发生器(光机)以较低的射线量(通常球管电流在10毫安左右)围绕投照体做环形数字式投照;然后将围绕投照体多次(180-360次,依产品不同而异)数字投照后“交集”中所获得的数据在计算机中“重组”,进而获得高清三维图像常用于拍摄头部及牙齿。cbct系统主要有硬件系统和软件系统构成,其中硬件系统又由很多部件组成,这些部件都是由电脑上位机通过控制,比如由电脑对cbct中运动控制单元发出各种控制信号,运动控制单元接收到信号之后控制电机运动,进而使cbct中产生各种动作,如:光机旋转、c型臂旋转、c型臂移动等,完成拍摄动作;拍摄过程中,x射线探测器也会不断记录并向电脑传输拍摄数据。
2、在cbct系统在整个扫描过程中会涉及到很多部件的协同工作和通信控制,如果其中一个部件出现问题就会导致扫描失败,图像异常情况,所以在扫描开始时需要一套自检流程对设备进行自检,确定在扫描之前设备时正常的,这样就可以避免由于设备故障原因导致扫描失败、重复扫描,进而避免病人多次受辐射危害。目前市场的cbct产品有些也有带自检功能和不带自检功能,但是大部分自检功能都不是很完善。
3、有线设备为了降低成本和降低设计的辅助程度,设备没有自动自检功能;不能实现设备的硬件和软件自动故障检测,增加了故障检修难度,降低了工作效率。扫描过程中会因为其中一个部件出现问题导致扫描失败、重复扫描情况,降低了客户工作效率。
4、带自检功能设备具有部分硬件电路故障自检功能,通过指示灯提示警告信息,但自检功能单一、不全面;自检错误信息不直观,不能通过上位机记录和提示操作者,增加了故障检修难度,降低了工作效率。
技术实现思路
1、本发明提供了一种基于多模态数据融合的牙根管的识别方法及系统,在扫描之前自动执行设备自检,以便快速的排查故障原因、解除故障,有效的提高工作效率,减少客户的等待时间,降低时间成本。
2、本发明提供了一种基于多模态数据融合的牙根管的识别方法,包括:
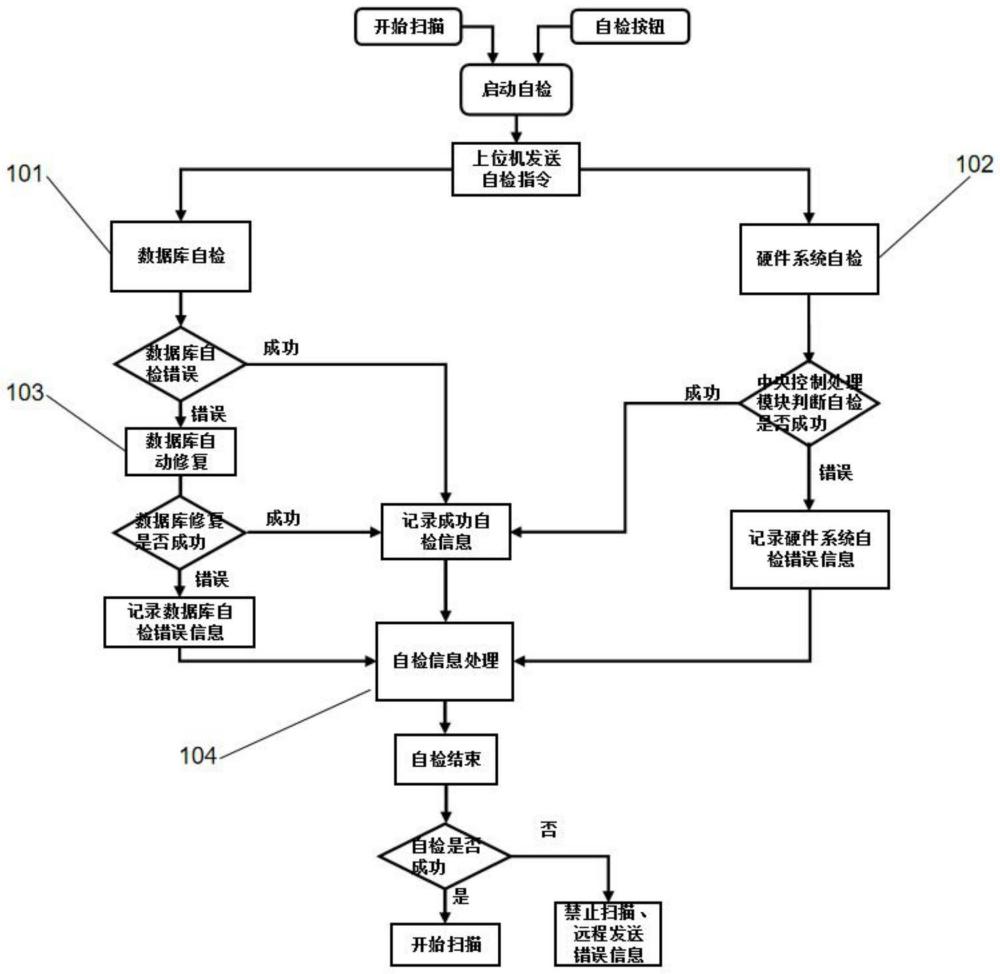
3、上位机发送自检指令,以启动cbct设备自检功能进行数据库自检和硬件系统自检;
4、当数据库自检和硬件系统自检成功后,记录成功自检信息;
5、当数据库自检错误时,进行数据库自动修复并根据修复结果确定是否记录数据库自检错误信息;当硬件系统自检错误时,记录硬件系统自检错误信息;
6、记录数据库自检错误信息和硬件系统自检错误信息并进行自检信息处理;
7、确定自检程序结果,并当自检成功时执行扫描以对牙根管进行识别,当自检失败时禁止扫描并远程发送错误信息。
8、进一步地,进行数据库自检的流程包括:
9、当数据库接收到自检指令后,上位机和数据库进行连接,以读取数据库的基本配置信息、常规参数配置进行自检;其中,所述基本配置信息包括x射线探测器、光机的厂家和型号信息;
10、上位机通过中央控制处理模块读取光机、x射线探测器的厂家和型号配置信息,将配置信息返回到上位机和数据库读到的配置信息进行对比;
11、当数据库读取到的配置信息和实际部件的信息不一致时,上位机提示操作者并自动将数据库的配置信息更改为实际配置信息,软件配置界面参数同步进行自动修改;
12、修改后再次确认是否修改成功,若数据库参数修改成功,上位机记录数据库参数修改成功,若数据库参数修改失败,上位机记录数据修复错误信息并显示在软件警告栏。
13、进一步地,进行硬件系统自检的流程包括:
14、启动自检程序后,上位机发送自检指令串口方式进行硬件系统自检,对cbct设备的通信控制、电路电压电流进行自检,以及根据电流值进行cbct设备故障识别;其中,cbct设备包括x射线探测器、运动驱动控制单元、光机控制单元、光机、中央控制处理模块、温度监控系统;
15、若硬件系统自检成功,中央控制处理模块将信息发送给上位机,上位机会记录每个部件自检的情况,若硬件部件自检过程中有其中一个部件自检失败,对应失败部件的错误信息通过上位机记录;
16、数据库自检和各个硬件部件均自检成功时,允许进入预备扫描,上位机将数据库自检和硬件部件自检的情况发送到软件的状态栏进行提示。
17、进一步地,根据电流值进行cbct设备故障识别的流程包括:
18、将检测的cbct设备电流值与系统特征库中数据进行对比,若cbct设备电流值与工作电流值相等,则认为cbct设备处于正常工作状态,继续扫描检测;
19、若检测值不同于工作电流,则对设定时间的数据进行求均值和方差,并与故障知识库特征值进行比对;
20、若比对的均值和方差符合该设备同品牌同型号的故障a特征值,则认为该设备发生故障a,并根据系统的修复建议进行设备修复;
21、若比对的均值和方差不符合故障知识库中现有故障数据,则由工程师介入,判断设备是否发生系统未知故障,并将故障特征值、名称和修复方式进行存储,用于下次故障识别。
22、进一步地,在对cbct设备进行电流值检测和比对之前,还包括:
23、采用获取先验知识的方法对cbct设备进行检测后的故障分类,随着故障规则愈来愈多,将对故障数据建立故障综合数据库,数据库的规则推理不仅具有先验知识,还具有历史故障参考。
24、进一步地,对设定时间的数据进行求均值和方差,包括:
25、cbct设备硬件结构和电子特性上分析包含传感器、执行器和被控对象,其表达式为:
26、i(t)=ax(t)+bu(t)+cm(t)+r1f(t)
27、其中,x(t)为传感器输出的采集信号,u(t)为执行器输出的指令信号,m(t)为被控对象反馈输出的信号,分别x(t)∈rn、u(t)∈rp、m(t)∈rq,其为设备运行情况下以电信号形式输出的成分信号,i(t)为观测量矢量或传感器的输出矢量,为借助外部传感器检测设备输出的矢量,f(t)为系统的某个部位故障矢量,f(t)∈rg,每个元素fi(t)(i=1,2,3,…,g)对应于某具体的故障形式,也是需要求解的未知时间函数,a、b、c为相应维数的常数矩阵,r1为故障系数矩阵;
28、基于测量值与数学模型产生的测量值的估计值之间差定义为残差(n),残差(n)计算为公式为:
29、n=|n1(t)-n2(t)|
30、其中,n1(t)为采样的状态观察量,n2(t)为数据库状态基准值;
31、将检测电流与故障特征电流进行均值与方差处理,即将如上公式代入,得到:
32、x=|i1(t)-i2(t)|
33、
34、其中,i1(t)为设定时间数据采样点采样数据,i2(t)为与故障特征库中对应先验知识的标准数据,残差越小表明故障发生概率越大。
35、本发明还提供了一种基于多模态数据融合的牙根管的识别系统,基于如上所述的基于多模态数据融合的牙根管的识别方法,包括pc工作站、x射线探测器、运动驱动控制单元、光机控制单元、多个电机、光机、中央控制处理模块和温度监控系统,所述pc工作站分别连接中央控制处理模块和x射线探测器,所述中央控制处理模块分别连接所述x射线探测器、光机控制单元、运动驱动控制单元、温度监控系统,所述光机控制单元连接光机,所述运动驱动控制单元连接多个电机;
36、所述pc工作站安装有上位机软件系统、保存数据库文件,用于和中央处理模块进行通信,接收x射线探测器的数据并显示、保存图像;
37、所述x射线探测器用于在中央控制处理模块的控制下接收x射线信号,并将x射线信号转为图像信号发送回pc工作站;
38、所述运动驱动控制单元用于和中央控制处理模块进行通信并控制电机使设备运动组件转动;
39、所述光机控制单元用于和pc工作站进行通信并控制光机的工作电压和电流;
40、所述多个电机用于在运动驱动控制单元的控制下,带动设备各运动部件转动;
41、所述光机用于接收光机控制单元4发出控制信号产生x射线;
42、所述中央控制处理模块用于和其他模块、pc工作站进行通信控制、数据处理和数据发送和接收;
43、所述温度监控系统用于实时监控多个电机、光机、运动驱动控制单元的温度,并将温度信息通过串口发送会中央控制处理模块进行处理,当监测到某个部件的温度超过第一阈值,软件的警告栏进行提示;若超过第二阈值,软件将进行报警并启动禁止扫描程序。
44、进一步地,还包括数据库自检、硬件系统自检、数据库自动修复和自检信息处理;
45、所述数据库自检用于对数据库的基本配置信息、常规参数配置进行自检,上位机通过中央控制处理模块读取光机、x射线探测器的厂家和型号配置信息,将配置信息返回到上位机和数据库读到的配置信息进行对比,确定数据库读取到的配置信息和实际部件的信息是否一致;
46、所述硬件系统自检用于对x射线探测器、运动驱动控制单元、光机控制单元、光机、中央控制处理模块、温度监控系统的通信控制、电路电压电流进行自检;
47、所述数据库自动修复用于当数据库读取到的配置信息和实际部件的信息不一致时,上位机软件提示操作者并自动将数据库的配置信息更改为实际配置信息,软件配置界面参数同步进行自动修改;
48、所述自检信息处理用于接收处理数据库自检、硬件系统自检的自检结果信息,将自检结果通过上位机发送软件提示界面,所有自检信息被记录工程界面。
49、本发明的有益效果为:
50、本发明通过在扫描之前自动执行设备自检功能,通过分别和软件数据库、光机、x平板探测器、步进电机、运动驱动控制模块、温度监控系统进行设备自检功能,当其中某一个部件出现异常情况,其故障代码都将返回到上位机进行识别,识别都将错误信息显示在软件提示状态栏,只有当所有部件自检都通过后,软件才允许继续扫描。确保在扫描过程中不会因为其中一个部件出现问题导致扫描失败、重复扫描情况。同时服务工程师也可以在软件工程界面(hl_engeer)查看具体的故障信息,通过工程界面的故障信息可以快速的排查故障原因、解除故障,这样可以有效的提高工作效率,减少客户的等待时间。
- 还没有人留言评论。精彩留言会获得点赞!