一种触觉手术装置及其控制方法与流程
本发明涉及医疗器械,具体涉及一种触觉手术装置及其控制方法。
背景技术:
1、手术机器人是由机械臂、控制器、视觉系统等组成的医疗设备,可辅助外科医生进行高精度、微创或远程手术,目前已有应用于肾脏移植案例,案例中医生通过主控制台远程操作床旁机械臂,利用机械臂上的手术剪将离断肾动、静脉,以及游离断输尿管,从而可从供体取出肾脏,通过控制手术剪靠近血管或输尿管后,按压按键或脚踏板来控制手术剪执行剪断动作,此过程中医生感受不到剪切执行端的阻力,手术操作的形式和手感完全不同普通手术,医生需要花费较多的时间与机器磨合,平时的普通手术经验得不到充分发挥。
技术实现思路
1、本发明的发明目的是提供一种触觉手术装置及其控制方法,使得医生能够感受到手术端的剪切阻力,手术的手感更接近于平时普通手术,从而减少医生的磨合练习时间。
2、为了实现发明目的,本发明采用以下技术方案:
3、一种触觉手术装置,包括末端剪切器、触觉传感器、操作手柄和摩擦机构;
4、其中,末端剪切器包括第一剪片、第二剪片、驱动板和第一伸缩电机,第一剪片和第二剪片的中部通过铰链连接,第一剪片和第二剪片同方向的一端上设置有凸轴,驱动板上设置有两条滑槽,两条滑槽成锐角夹角分布,凸轴设于滑槽中,第一伸缩电机与驱动板的一侧相连接;
5、触觉传感器为环形形状,触觉传感器固定连接于凸轴外侧,且触觉传感器的外侧面与滑槽侧壁相接触;
6、操作手柄用于控制末端剪切器,操作手柄包括第一柄部和第二柄部,第一柄部和第二柄部的一端通过铰链连接;
7、摩擦机构包括设于操作手柄两侧的两个,摩擦机构包括第二伸缩电机、主动摩擦盘和从动摩擦盘,主动摩擦盘和从动摩擦盘相对设置,主动摩擦盘连接于第二伸缩电机上,从动摩擦盘设于第一柄部和第二柄部上。
8、进一步的,触觉传感器包括设于由内到外依次设置的基座、压电薄膜和橡胶外套,基座与凸轴相连,橡胶外套与滑槽侧壁相接触。
9、进一步的,基座的外侧面上设置有用于装入压电薄膜和橡胶外套的凹槽,压电薄膜贴设于凹槽的底部,橡胶外套贴于压电薄膜贴外,且橡胶外套凸出凹槽外。
10、进一步的,橡胶外套为环形体,其纵向截面为弓形形状。
11、进一步的,第一柄部和第二柄部铰链连接的相对一端上设置有手持环,第一柄部上的手持环与第二柄部上的手持环相背对设置。
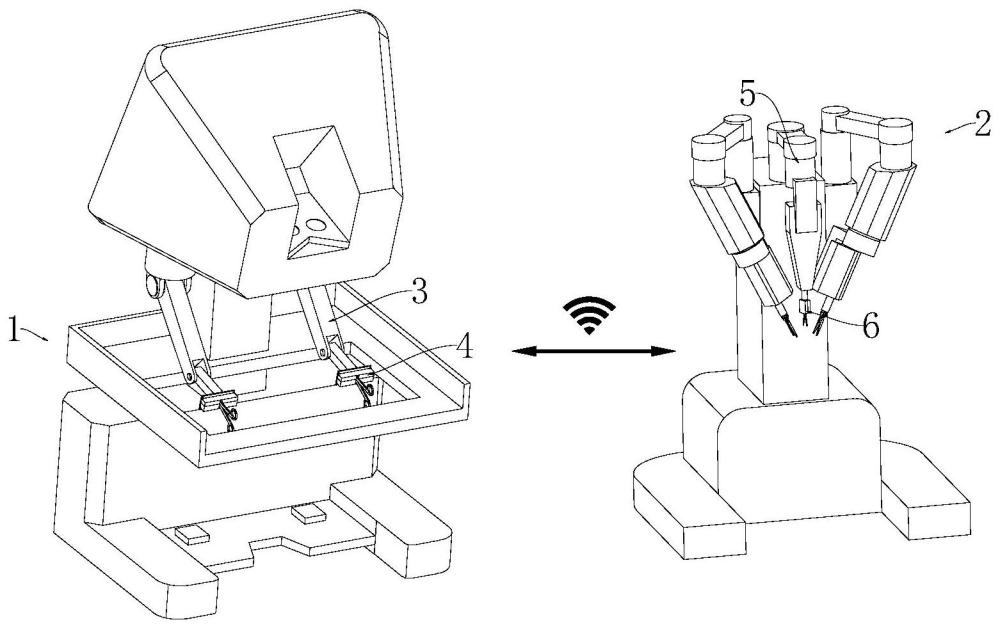
12、进一步的,触觉手术装置还包括有控制台和手术执行台,控制台设置有第一机械臂,操作手柄和摩擦机构连接于第一机械臂上,手术执行台上设置有第二机械臂,末端剪切器设于第二机械臂的上,第一机械臂用于控制第二机械臂。
13、进一步的,第一机械臂的末端上设置有第一容纳盒,摩擦机构设于第一容纳盒的内的两侧,操作手柄的铰接一端位于第一容纳盒内,并且位于两侧摩擦机构之间,第一容纳盒的侧面设置伸出操作手柄另一端的开口。
14、进一步的,第二机械臂的末端上设置有第二容纳盒,驱动板和触觉传感器均设于第二容纳盒内,第二容纳盒的上下两端开口,第一剪片和第二剪片设有凸轴的一端位于第二容纳盒内,并与驱动板相连,第一剪片和第二剪片的另一端由第二容纳盒的下端开口伸出,第一伸缩电机的一端位于第二容纳盒内并与驱动板相连,第一伸缩电机的另一端由第二容纳盒的上端开口伸出。
15、进一步的,驱动板上设置有滑块,第二容纳盒的内部设置有平行于第一伸缩电机的滑轨,滑块可滑动地设于滑轨中。
16、此外,本发明还提供了一种控制方法,用于控制上述的触觉手术装置,该方法包括如下步骤:
17、(1)通过控制末端剪切器剪切试验件,根据剪切手感设置触觉参数,触觉参数为触觉传感器所受压力与摩擦机构输出摩擦力的比值;
18、(2)对第一柄部和第二柄部施加转动力矩,获取第一柄部和第二柄部相对转动角度值,根据该角度值控制第一伸缩电机伸缩,使得第一剪片和第二剪片转动相应角度而产生剪切;
19、(3)采集压电薄膜输出电压值,根据压电薄膜输出电压值和触觉参数计算第二伸缩电机的伸出行程;
20、(4)根据上一步骤计算结果,控制第二伸缩电机伸长,使主动摩擦盘和从动摩擦盘相接触,主动摩擦盘和从动摩擦盘相对转动而产生摩擦力。
21、与现有技术相比,本发明有益效果是:
22、1、采用的操作手柄包括了一端通过铰链连接的第一柄部和第二柄部,通过第一柄部和第二柄部的转动来控制第一剪片和第二剪片的转动剪切,相对于通过按键或脚踏板控制剪切来说,本装置的方式更接近于普通手术,有利于减少医生的磨合时间。
23、2、通过设置触觉传感器接收末端剪切器产生的阻力信号,再将信号转换成摩擦机构产生一定转动阻力,从而在操作手柄上能够感知手术端的剪切阻力,进而使得手术更接近普通手术,有利于充分发挥医生平时的手术经验。
技术特征:
1.一种触觉手术装置,其特征在于,包括:
2.如权利要求1所述的触觉手术装置,其特征在于,
3.如权利要求2所述的触觉手术装置,其特征在于,
4.如权利要求3所述的触觉手术装置,其特征在于,
5.如权利要求1所述的触觉手术装置,其特征在于,
6.如权利要求1所述的触觉手术装置,其特征在于,
7.如权利要求6所述的触觉手术装置,其特征在于,
8.如权利要求6所述的触觉手术装置,其特征在于,
9.如权利要求8所述的触觉手术装置,其特征在于,
10.一种控制方法,用于控制权利要求1~9中任意一种触觉手术装置,其特征在于,包括如下步骤:
技术总结
本发明公开一种触觉手术装置,包括末端剪切器、触觉传感器、操作手柄和摩擦机构,触觉传感器设于末端剪切器上,用来接收末端剪切器所受到的剪切阻力,摩擦机构包括设于操作手柄两侧的两个,操作手柄转动中摩擦机构产生摩擦阻力,从而使医生感受到剪切的阻力,本发明公开还公开了一种控制触觉手术装置的方法,该方法中首先通过剪切试验件来调整触觉参数,然后转动第一柄部和第二柄部时,采集压电薄膜输出电压值,进而计算第二伸缩电机的伸出行程,主动摩擦盘和从动摩擦盘相接触产生相应的摩擦阻力。本发明的触觉手术装置及其控制方法使得医生能够感受到手术端的剪切阻力,手术的手感更接近于平时普通手术,有利于减少医生的磨合练习时间。
技术研发人员:王洪良,黄晨,罗海凤,李壮江
受保护的技术使用者:中国人民解放军联勤保障部队第九二三医院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!