下肢康复机器人及其控制方法与流程
本发明属于康复机器人,具体涉及一种下肢康复机器人及其控制方法。
背景技术:
1、下肢康复机器人通常需要配合步行车来共同完成患者的康复训练任务,步行车通常需要配备许多专业的设备,并且机体本身多为金属材质,体积和质量较大。对患者而言,因为这样的设计导致在进行康复训练的过程中,患者需要拖着步行车前进,使患者的步态训练康复效果大打折扣。
2、目前市面上绝大部分产品主要以减小步行车重量,减小步行车的摩擦力的方式来解决这个问题,但是这些方式只是一定程度减小了影响,并未从实质上消除水平方向上分力的影响,导致患者的步态训练康复效果较差。
3、因此,如何提供一种有效的方案以消除步行车在水平方向上分力的影响,已成为现有技术中一亟待解决的问题。
技术实现思路
1、本发明的目的是提供一种下肢康复机器人及其控制方法,用以解决现有技术中存在的上述问题。
2、为了实现上述目的,本发明采用以下技术方案:
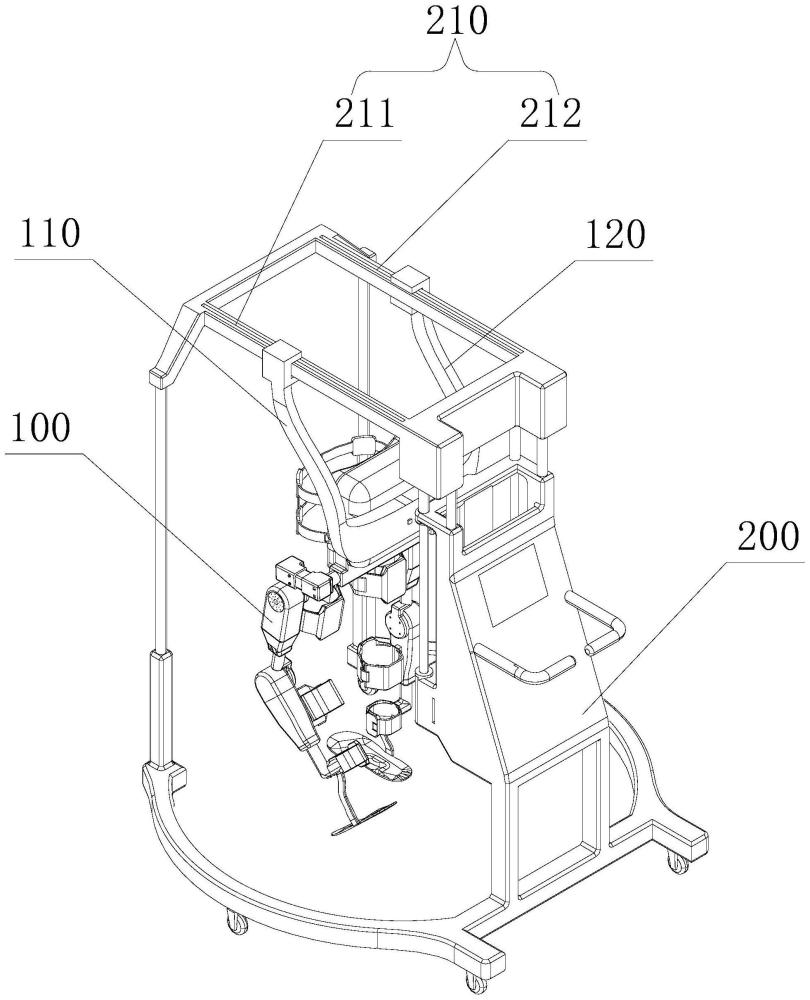
3、第一方面,本发明提供了一种下肢康复机器人,包括康复机器人本体、步行车和激光测距传感器,所述步行车的顶部设置有悬吊装置,所述康复机器人本体与所述悬吊装置滑动连接并可沿水平方向滑动,所述激光测距传感器设置于所述康复机器人本体或所述步行车上,所述步行车上设置有驱动电机、主控制器和电机驱动控制器,所述激光测距传感器、所述主控制器、所述电机驱动控制器和所述驱动电机依次电连接;
4、所述激光测距传感器用于检测所述康复机器人本体与所述步行车之间的距离;
5、所述主控制器用于基于所述康复机器人本体与所述步行车之间的距离计算出所述康复机器人本体与所述步行车之间的距离变化率,基于所述距离和所述距离变化率进行模糊控制处理得到所述康复机器人本体与所述步行车之间的距离误差比例校正值、距离误差积分校正值和距离误差微分校正值,基于所述距离误差比例校正值、所述距离误差积分校正值和所述距离误差微分校正值确定出所述康复机器人本体与所述步行车之间的距离误差比例正定值、距离误差积分正定值和距离误差微分正定值,基于所述距离误差比例正定值、所述距离误差积分正定值和所述距离误差微分正定值计算出所述步行车的目标加速度,以及基于所述步行车的目标加速度计算出所述驱动电机的目标电流参数;
6、所述电机驱动控制器用于根据所述驱动电机的目标电流参数计算出所述驱动电机的目标三相电压值,以便基于所述目标三相电压值控制所述驱动电机输出相应力矩以驱动步行车,以使所述步行车实时跟随所述康复机器人本体。
7、基于上述公开的内容,本发明通过在步行车的顶部设置有悬吊装置,康复机器人本体与悬吊装置滑动连接并可沿水平方向滑动,并在步行车上设置驱动电机、主控制器和电机驱动控制器,激光测距传感器、主控制器、电机驱动控制器和驱动电机依次电连接,其中激光测距传感器用于检测康复机器人本体与步行车之间的距离;主控制器用于基于康复机器人本体与步行车之间的距离计算出康复机器人本体与步行车之间的距离变化率,基于距离和距离变化率进行模糊控制处理得到康复机器人本体与步行车之间的距离误差比例校正值、距离误差积分校正值和距离误差微分校正值,基于距离误差比例校正值、距离误差积分校正值和距离误差微分校正值确定出康复机器人本体与步行车之间的距离误差比例正定值、距离误差积分正定值和距离误差微分正定值,基于距离误差比例正定值、距离误差积分正定值和距离误差微分正定值计算出步行车的目标加速度,以及基于步行车的目标加速度计算出驱动电机的目标电流参数;电机驱动控制器用于根据驱动电机的目标电流参数计算出驱动电机的目标三相电压值,以便基于所述目标三相电压值控制所述驱动电机输出相应力矩以驱动步行车,以使步行车实时跟随康复机器人本体。如此,在康复训练的过程中,可通过悬吊装置为患者提供向上的支撑力,同时当患者行走时可控制步行车跟随穿戴康复机器人本体的患者移动,无需患者拖着步行车前行,步行车与康复机器人本体之间的作用力仅限于康复机器人本体与悬吊装置之间几乎可以忽略不计的滑动摩擦力,消除了步行车带来的阻力和惯性的影响,患者的康复训练将会更加接近真实的步行状态环境,患者步行更省力、更自然,从而达到更好的康复训练效果。
8、通过上述的设计,本发明可在康复训练的过程中,通过悬吊装置为患者提供向上的支撑力,同时当患者行走时可控制步行车跟随穿戴康复机器人本体的患者移动,无需患者拖着步行车前行,步行车与康复机器人本体之间的作用力仅限于康复机器人本体与悬吊装置之间几乎可以忽略不计的滑动摩擦力,消除了步行车带来的阻力和惯性的影响,患者的康复训练将会更加接近真实的步行状态环境,患者步行更省力、更自然,从而达到更好的康复训练效果,便于实际应用和推广。
9、在一个可能的设计中,悬吊装置包括水平设置的第一导向杆和第二导向杆,所述一导向杆与所述第二导向杆位于同一水平高度平行设置,所述康复机器人本体上设置有第一悬吊壁和第二悬吊臂,所述第一悬吊壁与所述第一导向杆滑动连接,所述第二悬吊臂与所述第二导向杆滑动连接。
10、在一个可能的设计中,所述第一悬吊壁连接所述第一导向杆的一端设置有第一滑槽,所述第二悬吊壁连接所述第二导向杆的一端设置有第二滑槽,所述第一导向杆位于所述第一滑槽内,所述第二导向杆位于所述第二滑槽内。
11、在一个可能的设计中,所述第一滑槽的槽口宽度小于槽底宽度,所述第二滑槽的槽口宽度小于槽底宽度。
12、在一个可能的设计中,所述激光测距传感器设置于所述康复机器人本体朝向所述步行车的一侧。
13、第二方面,本发明提供了一种下肢康复机器人的控制方法,应用于第一方面或第一方面任一可能设计所述的下肢康复机器人,包括:
14、通过激光测距传感器检测所述康复机器人本体与所述步行车之间的距离;
15、通过主控制器基于所述康复机器人本体与所述步行车之间的距离计算出所述康复机器人本体与所述步行车之间的距离变化率;
16、通过主控制器基于所述距离和所述距离变化率进行模糊控制处理得到所述康复机器人本体与所述步行车之间的距离误差比例校正值、距离误差积分校正值和距离误差微分校正值;
17、通过主控制器基于所述距离误差比例校正值、所述距离误差积分校正值和所述距离误差微分校正值确定出所述康复机器人本体与所述步行车之间的距离误差比例正定值、距离误差积分正定值和距离误差微分正定值;
18、通过主控制器基于所述距离误差比例正定值、所述距离误差积分正定值和所述距离误差微分正定值计算出所述步行车的目标加速度;
19、通过主控制器基于所述步行车的目标加速度计算出所述驱动电机的目标电流参数;
20、通过电机驱动控制器根据所述驱动电机的目标电流参数计算出所述驱动电机的目标三相电压值,以便基于所述目标三相电压值控制所述驱动电机输出相应力矩以驱动步行车,以使所述步行车实时跟随所述康复机器人本体。
21、在一个可能的设计中,所述基于所述距离和所述距离变化率进行模糊控制处理得到所述康复机器人本体与所述步行车之间的距离误差比例校正值、距离误差积分校正值和距离误差微分校正值,包括:
22、将所述距离和所述距离变化率量化;
23、计算量化后的距离对模糊论域中各论域值的第一隶属度以及量化后的距离变化率对模糊论域中各论域值的第二隶属度;
24、基于量化后的距离的第一隶属度、量化后的距离变化率的第二隶属度以及模糊规则表,确定出距离误差比例校正值对模糊论域中各论域值的第三隶属度、距离误差积分校正值对模糊论域中各论域值的第四隶属度以及距离误差微分校正值对模糊论域中各论域值的第五隶属度;
25、依据距离误差比例校正值对模糊论域中各论域值的第三隶属度、距离误差积分校正值对模糊论域中各论域值的第四隶属度以及距离误差微分校正值对模糊论域中各论域值的第五隶属度进行解模糊,得到距离误差比例校正值、距离误差积分校正值和距离误差微分校正值。
26、其中,模糊规则表中记录有距离误差比例校正值的第三隶属度与量化后的距离的第一隶属度和量化后的距离变化率的第二隶属度之间的对应关系,距离误差积分校正值的第四隶属度与量化后的距离的第一隶属度和量化后的距离变化率的第二隶属度之间的对应关系,以及距离误差微分校正值的第五隶属度与量化后的距离的第一隶属度和量化后的距离变化率的第二隶属度之间的对应关系。
27、在一个可能的设计中,模糊论域的取值范围为[-3,3]。
28、在一个可能的设计中,所述步行车的目标加速度为其中a(t)表示所述步行车在t时刻的目标加速度,k表示放大系数,kp表示距离误差比例正定值、e(t)表示t时刻所述康复机器人本体与所述步行车之间的距离,ki表示距离误差积分正定值,kd表示距离误差微分正定值。
29、在一个可能的设计中,所述驱动电机的目标电流参数为iq=kr(ma+f),其中k表示比例系数,r表示所述步行车的车轮半径,m表示所述步行车的质量,a表示所述步行车的目标加速度,f表示所述步行车的车轮与地面的摩擦力。
30、有益效果:
31、本发明提供的下肢康复机器人及其控制方法,可在康复训练的过程中,通过悬吊装置为患者提供向上的支撑力,同时当患者行走时可控制步行车跟随穿戴康复机器人本体的患者移动,无需患者拖着步行车前行,步行车与康复机器人本体之间的作用力仅限于康复机器人本体与悬吊装置之间几乎可以忽略不计的滑动摩擦力,消除了步行车带来的阻力和惯性的影响,患者的康复训练将会更加接近真实的步行状态环境,患者步行更省力、更自然,从而达到更好的康复训练效果,便于实际应用和推广。
- 还没有人留言评论。精彩留言会获得点赞!