导航式截骨摆锯的位姿校准装置、方法、设备及存储介质与流程
本申请涉及医疗器械位姿校准,尤其涉及一种导航式截骨摆锯的位姿校准装置、方法、设备及存储介质。
背景技术:
1、膝关节是人体最大、解剖结构最复杂、对运动功能要求很高的关节。膝关节置换术是将胫骨和股骨的病变部位进行截骨并用人工假体替换,以缓解膝关节疼痛,恢复膝关节运动功能。
2、在膝关节置换手术的过程中,需要对骨面进行切割,现有技术一般是利用导航式截骨摆锯对目标部位进行截骨。如图1所示,在手术之前,需要分别在摆锯和患者的胫骨上固定光学参考阵列,光学参考阵列上附有若干光学标记物,光学标记物构成光学参考阵列的局部坐标系(fsaw与fbone)。通过光学定位相机可以捕获光学参考阵列的实时位姿(即光学定位相机坐标系fcamera至fsaw、fbone的转换矩阵tb、ta)。导航系统内存储有锯片模型与胫骨模型,使用光学定位相机捕获的光学参考阵列的位姿数据实时调整模型在图像空间中的位姿,使得模型的相对位姿关系与实物相符,实现现实空间至图像空间的映射。
3、如图2所示,在上述空间映射关系的建立过程中,锯片平面的特征值(平面法向量与锯片平面上一定位凹槽点p的坐标值)在摆锯参考阵列坐标系fsaw下的准确性直接影响导航精度。
4、目前获取锯片平面特征值的方法主要有:
5、1)使用摆锯的硬件设计参数计算锯片平面特征值,其缺点在于,由于锯片参考阵列与摆锯非一体式加工,二者的组装精度难以保证,导致通过硬件设计参数计算得到的数值与真实值之间存在较大误差;
6、2)使用光学探针采集锯片平面上至少3个点在锯片参考阵列坐标系fsaw下的坐标值,利用采集得到的点坐标拟合平面,得到锯片平面法向量使用光学探针直接采集锯片平面上定位凹槽点p在锯片参考阵列坐标系fsaw下的坐标值;其缺点在于,需要探针重复进行采点,操作较为繁琐,且锯片面积较小,使用小范围内采集得到的点拟合平面存在较大误差。
技术实现思路
1、本申请提供了一种导航式截骨摆锯的位姿校准装置、方法、设备及存储介质,解决了现有技术中计算锯片平面特征值存在较大误差、操作繁琐等问题。
2、本申请第一方面提供了一种导航式截骨摆锯的位姿校准装置,包括:
3、与摆锯的锯片可拆卸连接的夹持块,所述夹持块上设有多个验证点;
4、安装在夹持块上的第一参考阵列;
5、安装在摆锯上的第二参考阵列;
6、安装有第三参考阵列的光学探针,用于获取夹持块上多个验证点的位置信息,所述验证点与光学探针的尖端相配;
7、用于捕获第一参考阵列、第二参考阵列、第三参考阵列位姿信息的定位相机;
8、与定位相机连接的计算机,用于根据第一参考阵列、第二参考阵列、第三参考阵列的位姿信息对摆锯的位姿进行校准。
9、在某些实施方式中,所述第一参考阵列、第二参考阵列、第三参考阵列均包括定位支架以及安装在定位支架上的多个反光标记物。
10、在某些实施方式中,所述反光标记物的数量不低于3个,且多个反光标记物不在一条直线上。
11、在某些实施方式中,所述夹持块上设有用于夹持锯片的夹持通道,所述夹持通道的侧壁开设有通孔,所述通孔内安装有玻珠螺钉,所述玻珠螺钉的珠头与锯片上的定位点相配;所述夹持通道的宽度略大于锯片的厚度,通过在夹持通道的侧壁开设通孔,并在通孔内安装玻珠螺钉,夹紧固定锯片时,通过拧紧玻珠螺钉,使玻珠螺钉的珠头顶在锯片平面的定位点上,定位点为与珠头相配的凹点;通过玻珠螺钉与定位点的配合,可以将锯片固定在夹持块内,确保锯片与夹持块的相对位姿固定,便于后续进行位姿校准。
12、在某些实施方式中,所述验证点的数量不低于3个,且多个验证点不在一条直线上。
13、本申请第二方面提供了一种导航式截骨摆锯的位姿校准方法,包括以下步骤:
14、在夹持块与锯片结合时,获取在虚拟场景坐标系下夹持块上各验证点的坐标值构成的有序点集pset1、锯片平面的法向量以及锯片平面上定位点的坐标值p1;
15、采用定位相机配合第三参考阵列,获取夹持块上的多个验证点在第一参考阵列坐标系下的坐标值构成的有序点集pset2;
16、利用有序点集pset1和pset2,计算第一参考阵列坐标系至虚拟场景坐标系的转换矩阵t3;
17、在夹持块与锯片结合时,采用定位相机配合第二参考阵列和第一参考阵列,计算定位相机坐标系至第二参考阵列坐标系、第一参考阵列坐标系的转换矩阵分别为t4、t5;
18、计算在第二参考阵列坐标系下锯片平面的法向量为:
19、
20、计算在第二参考阵列坐标系下定位点的坐标值为:
21、
22、采用本申请的位姿校准方法,由于夹持块对应的第一参考阵列坐标系只作为计算媒介,对第一参考阵列上的反光标记物没有加工精度要求,可以适配多种类型的反光标记物;仅需要夹持块部分具有高精度(实物参数与硬件设计参数相符)即可,降低了加工难度;且在校准过程中,可以在手术前通过光学探针采集夹持块上多个验证点,将夹持块与锯片结合后只需采点校准一次即可,后续术中无需再进行重复校准,操作简单,校准后的锯片平面特征值误差较小。
23、在某些实施方式中,构建有序点集pset2的方法为:
24、将光学探针的尖端置于夹持块的验证点处,获取在定位相机坐标系下第三参考阵列和第一参考阵列的位姿数据,并计算定位相机坐标系至第三参考阵列坐标系、第一参考阵列坐标系的转换矩阵分别为t1、t2;则所述验证点在第一参考阵列坐标系下的坐标值为:
25、
26、其中,a为光学探针的尖端在第三参考阵列坐标系下的坐标;
27、采用同样的方法计算其余验证点在第一参考阵列坐标系下的坐标值,记所有验证点在第一参考阵列坐标系下的坐标值构成的有序点集为pset2。
28、在某些实施方式中,计算转换矩阵t3的方法为:
29、采用vtk函数库的特征点变换函数,将pset1设定为变换函数的起始点集,将pset2设定为变换函数的目标点集,计算pset1至pset2的刚体转换矩阵t3,t3即为第一参考阵列坐标系至虚拟场景坐标系的转换矩阵。
30、本申请第三方面提供了一种电子设备,包括存储器和处理器,所述存储器内存储有可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述位姿校准方法的步骤。
31、本申请第四方面提供了一种存储介质,所述存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述位姿校准方法的步骤。
32、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
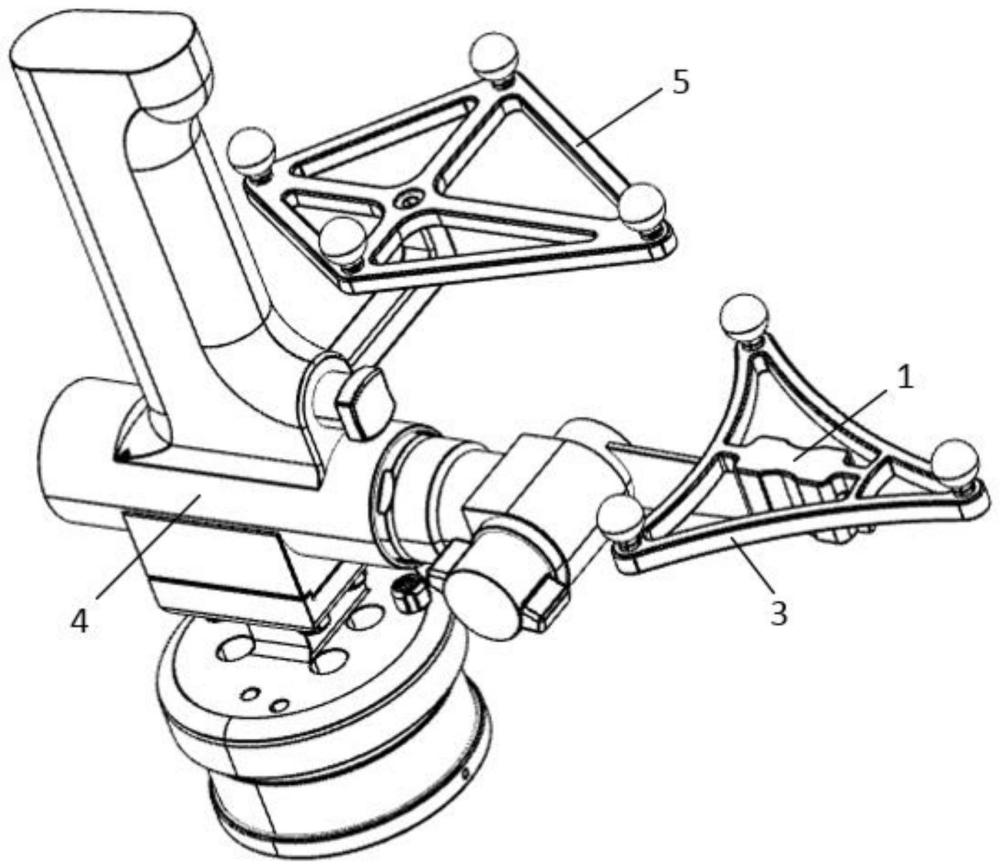
1.一种导航式截骨摆锯(4)的位姿校准装置,其特征在于,包括:
2.根据权利要求1所述的一种导航式截骨摆锯(4)的位姿校准装置,其特征在于,所述第一参考阵列(3)、第二参考阵列(5)、第三参考阵列(7)均包括定位支架以及安装在定位支架上的多个反光标记物。
3.根据权利要求2所述的一种导航式截骨摆锯(4)的位姿校准装置,其特征在于,所述反光标记物的数量不低于3个,且多个反光标记物不在一条直线上。
4.根据权利要求1所述的一种导航式截骨摆锯(4)的位姿校准装置,其特征在于,所述夹持块(1)上设有用于夹持锯片的夹持通道(9),所述夹持通道(9)的侧壁开设有通孔(10),所述通孔(10)内安装有玻珠螺钉(11),所述玻珠螺钉(11)的珠头与锯片上的定位点(12)相配。
5.根据权利要求1所述的一种导航式截骨摆锯(4)的位姿校准装置,其特征在于,所述验证点(2)的数量不低于3个,且多个验证点(2)不在一条直线上。
6.一种导航式截骨摆锯的位姿校准方法,基于权利要求1至5任一项所述的一种导航式截骨摆锯的位姿校准装置,其特征在于,包括以下步骤:
7.根据权利要求6所述的一种导航式截骨摆锯的位姿校准方法,其特征在于,构建有序点集pset2的方法为:
8.根据权利要求6所述的一种导航式截骨摆锯的位姿校准方法,其特征在于,计算转换矩阵t3的方法为:
9.一种电子设备,包括存储器和处理器,所述存储器内存储有可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求6至8中任一项所述方法的步骤。
10.一种存储介质,所述存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求6至8中任一项所述方法的步骤。
技术总结
本发明提供了一种导航式截骨摆锯的位姿校准装置,包括:与摆锯的锯片可拆卸连接的夹持块,所述夹持块上设有多个验证点;安装在夹持块上的第一参考阵列;安装在摆锯上的第二参考阵列;安装有第三参考阵列的光学探针,用于获取夹持块上多个验证点的位置信息;用于捕获第一参考阵列、第二参考阵列、第三参考阵列位姿信息的定位相机;与定位相机连接的计算机,用于根据第一参考阵列、第二参考阵列、第三参考阵列的位姿信息对摆锯的位姿进行校准;本发明由于第一参考阵列坐标系只作为计算媒介,对第一参考阵列上的反光标记物没有加工精度要求,降低了加工难度,提高了校准精度;且在校准过程中,无需利用光学探针重复进行采点,操作简单。
技术研发人员:黄志俊,刘金勇,钱坤,周再望,王明
受保护的技术使用者:杭州柳叶刀机器人有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!