一种位置自动跟踪设备的制作方法
本技术实施例涉及医疗设备领域,尤其涉及一种位置自动跟踪设备。
背景技术:
1、眼部角膜交联手术是通过治疗激光对患者的瞳孔中心进行照射,以起到对患者的眼部进行治疗的作用,眼部角膜交联手术通常是基于安装有治疗激光器的治疗设备完成的。
2、在进行眼部角膜交联手术时,首先会调整治疗设备中的治疗激光器的位置,直至治疗激光器的激光发射方向经过患者的瞳孔中心,且治疗激光器的激光射出点与患者的瞳孔中心之间距离为预设距离,此时可以开启治疗激光器以发射治疗激光,使治疗激光对患者的眼部进行激光治疗。
3、但是,在治疗的过程中患者的眼球会发生转动,进而会存在治疗激光照射到患者眼部的非治疗区域的情况,以导致治疗激光照射到患者瞳孔中心的时长不足等问题,因此会使眼部角膜交联手术的效果较差。
技术实现思路
1、有鉴于此,本技术实施例提供一种位置自动跟踪设备,以至少部分解决上述问题。
2、根据本技术实施例的第一方面,提供了一种位置自动跟踪设备,包括第一激光器、图像采集装置、处理器和调整装置;所述第一激光器用于在激光射出点与瞳孔中心的间距为预设距离后,开始从所述激光射出点向所述瞳孔中心发射治疗激光;所述图像采集装置用于采集瞳孔的图像;所述处理器,用于根据所述图像采集装置顺序采集的第一图像和第二图像,确定位置变更信息,其中,所述位置变更信息用于指示在采集所述第二图像时所述瞳孔中心所处第二空间位置,相对于在采集所述第一图像时所述瞳孔中心所处第一空间位置的偏移;所述调整装置用于根据所述位置变更信息对所述第一激光器的空间位置进行调整,以使所述治疗激光发射至所述瞳孔中心,且所述激光射出点与所述瞳孔中心的间距为所述预设距离。
3、在第一种可能的实现方式中,结合上述第一方面,所述位置变更信息包括第一偏移量、第二偏移量和第三偏移量;所述第一偏移量用于指示所述第二空间位置相对于所述第一空间位置沿第一方向的偏移量,所述第二偏移量用于指示所述第二空间位置相对于所述第一空间位置沿第二方向的偏移量,所述第三偏移量用于指示所述第二空间位置相对于所述第一空间位置沿第三方向的偏移量;所述第一方向、所述第二方向和所述第三方向相互垂直。
4、在第二种可能的实现方式中,结合上述第一方面,所述处理器,用于在所述第一激光器开始从所述激光射出点向所述瞳孔中心发射治疗激光之前,根据所述图像采集装置采集到的图像,确定所述瞳孔中心所处的第三空间位置,并确定在所述第一激光器的激光射出方向上与所述激光射出点之间距离为所述预设距离的第四空间位置,确定用于指示所述第四空间位置与所述第三空间位置之间相对偏移的位置差异信息;所述调整装置用于根据所述位置差异信息,调整所述第一激光器的位置,以使所述第一激光器的激光射出方向经过所述瞳孔中心,且使所述激光射出点与所述瞳孔中心的间距为所述预设距离。
5、在第三种可能的实现方式中,结合上述第二种可能的实现方式,所述位置差异信息包括第四偏移量、第五偏移量和第六偏移量,所述第四偏移量用于指示所述第三空间位置相对于所述第四空间位置沿第一方向的偏移量,所述第五偏移量用于指示所述第三空间位置相对于所述第四空间位置沿第二方向的偏移量,所述第六偏移量用于指示所述第三空间位置相对于所述第四空间位置沿第三方向的偏移量;所述第一方向、所述第二方向和所述第三方向相互垂直。
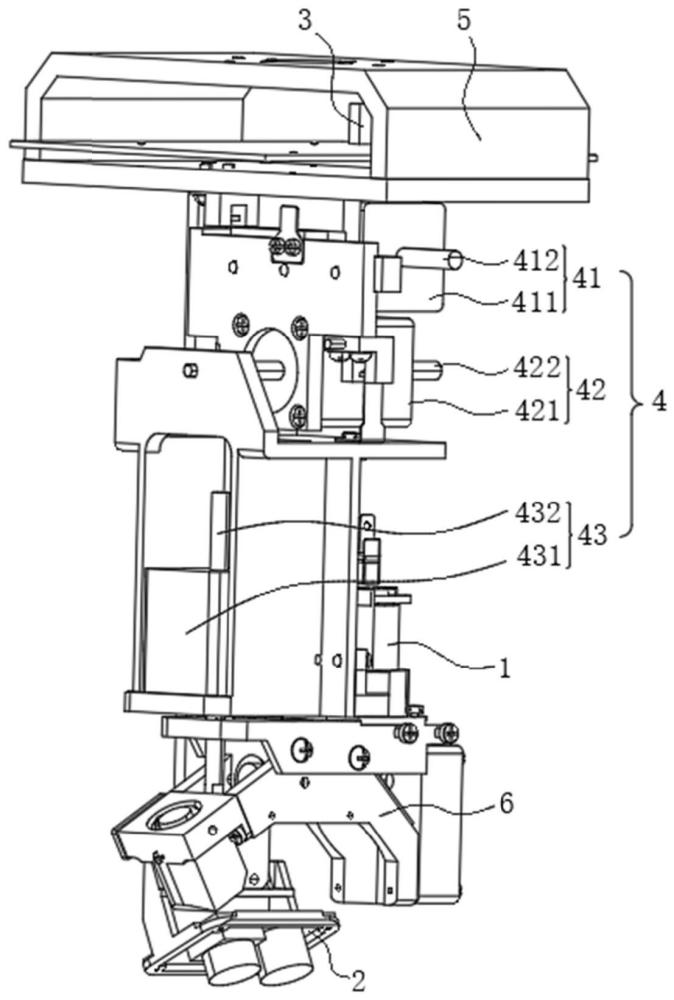
6、在第四种可能的实现方式中,结合上述第一种可能的实现方式或第三种可能的实现方式,所述位置自动跟踪设备包括支撑架,所述调整装置包括第一驱动件、第二驱动件和第三驱动件;所述第一驱动件与所述支撑架连接,所述第二驱动件与所述第一驱动件连接,所述第三驱动件与所述第二驱动件连接,所述第一激光器与所述第三驱动件连接;所述第一驱动件用于带动所述第二驱动件、所述第三驱动件和第一激光器沿所述第一方向移动,所述第二驱动件用于带动所述第三驱动件和第一激光器沿所述第二方向移动,所述第三驱动件用于带动所述第一激光器沿所述第三方向移动。
7、在第五种可能的实现方式中,结合上述第四种可能的实现方式,所述第一驱动件包括第一固定部和第一移动部,所述第一移动部沿所述第一方向与所述第一固定部滑动连接;所述第二驱动件包括第二固定部和第二移动部,所述第二移动部沿所述第二方向与所述第二固定部滑动连接;所述第三驱动件包括第三固定部和第三移动部,所述第三移动部沿所述第三方向与所述第三固定部滑动连接;所述第一固定部与所述支撑架固定连接,所述第二固定部与所述第一移动部固定连接,所述第三固定部与所述第二移动部固定连接,所述第一激光器与所述第三移动部固定连接。
8、在第六种可能的实现方式中,结合上述第四种可能的实现方式,所述图像采集装置与所述支撑架固定连接。
9、在第七种可能的实现方式中,结合上述第一种可能的实现方式、第二种可能的实现方式、第三种可能的实现方式或第四种可能的实现方式,所述图像采集装置为双目图像采集装置。
10、在第八种可能的实现方式中,结合上述第一种可能的实现方式、第二种可能的实现方式、第三种可能的实现方式或第四种可能的实现方式,所述位置自动跟踪设备包括第二激光器;所述第二激光器与所述第一激光器固定连接,所述第二激光器用于发射存在一个交点的两束非治疗激光,所述交点在所述第一激光器的激光发射方向上,且所述交点与所述激光射出点的间距为所述预设距离。
11、在第九种可能的实现方式中,结合上述第八种可能的实现方式,所述非治疗激光的激光截面为十字形。
12、由上述技术方案可知,采用位置自动跟踪设备包括第一激光器、图像采集装置、处理器和调整装置的方案,处理器可以根据图像采集装置连续采集到的第一图像和第二图像,确定位置变更信息,从而调整装置可以根据位置变更信息对第一激光器的空间位置进行调整。可见,在进行眼部角膜交联手术的过程中,首先会调整第一激光器的位置,直至第一激光器的激光射出点与瞳孔中心的间距为预设距离,且第一激光器的激光发射方向经过瞳孔中心,此时可以开启第一激光器,使第一激光器向瞳孔中心发射治疗激光;在第一激光器向瞳孔中心发射治疗激光的过程中,图像采集装置可以顺序采集到第一图像和第二图像,处理器可以对第一图像和第二图像进行识别处理,以确定第一图像被采集时瞳孔中心所处的第一空间位置和第二图像被采集时瞳孔中心所处的第二空间位置,处理器还可以根据第二空间位置相对于第一空间位置的偏移确定出位置变更信息,进而调整装置可以根据位置变更信息对第一激光器进行空间位置调整。基于此,在从第一图像被采集至第二图像被采集的时间段中,若患者的眼球发生转动或平移等位置变化,患者的瞳孔中心会发生空间位置变化,从而使第二空间位置与第一空间位置不同,进而位置变更信息可以指示患者的眼球的空间位置变化情况,调整装置根据位置变更信息对第一激光器进行空间位置调整,可以使第一激光器发射的治疗激光较快跟随瞳孔中心进行移动,以减小治疗激光照射到非治疗区域的情况发生的可能性,因此减小了治疗激光照射到患者瞳孔中心的时长不足的可能性,提高了眼部角膜交联手术的手术效果。
- 还没有人留言评论。精彩留言会获得点赞!