基于脑电信号的机动车驾驶人疲劳驾驶预警及干预的方法与流程
本发明涉及疲劳驾驶检测,特别涉及基于脑电信号的机动车驾驶人疲劳驾驶预警及干预的方法。
背景技术:
1、目前对疲劳驾驶的检测方法大致上可以分为两类:第一类方法是通过认外部感官特征来判断驾驶员的精神状态,然而这种方法随意性强误差较大;第二类方法是通过人的生理特征来判别所处的状态,其中包括脑电信号,然而驾驶员在驾驶汽车时可能会频繁地进行头部和身体的运动,这可能导致脑电信号的不稳定性和干扰。确保脑电信号设备在驾驶中能够准确捕获信号是一个技术挑战。
2、同时,由于目前的疲劳驾驶检测手段无法与交通监管部门和交通执法人员建立及时有效的沟通,使得交通监管部门和交通执法人员无法及时获知道路上由于疲劳驾驶带来的交通安全隐患信息,在隐患初步存在时,无法及时干预,排除隐患,在隐患发展过程中,无法及时介入,降低风险;大大阻碍了交通监管部门和交通执法人员行使其监管职能和充分发挥其干预能力。
技术实现思路
1、为了解决以上问题,本发明提供了基于脑电信号的机动车驾驶人疲劳驾驶预警及干预的方法。
2、为实现上述目的,本发明所采用的技术方案如下:
3、基于脑电信号的机动车驾驶人疲劳驾驶预警及干预的方法,包括如下步骤:
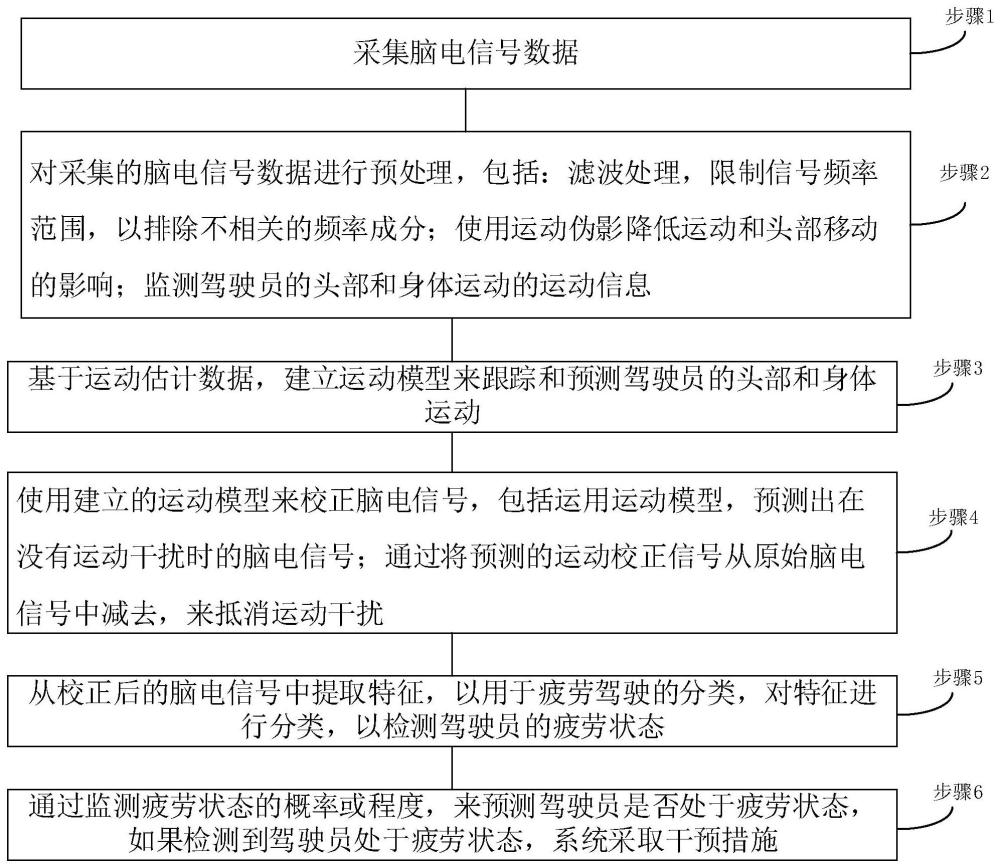
4、步骤1:采集脑电信号数据;
5、步骤2:对采集的脑电信号数据进行预处理,包括:
6、滤波处理,限制信号频率范围,以排除不相关的频率成分;使用运动伪影降低运动和头部移动的影响;监测驾驶员的头部和身体运动的运动信息;
7、步骤3:基于运动估计数据,建立运动模型来跟踪和预测驾驶员的头部和身体运动;
8、步骤4:使用建立的运动模型来校正脑电信号,包括:
9、运用运动模型,预测出在没有运动干扰时的脑电信号;
10、通过将预测的运动校正信号从原始脑电信号中减去,来抵消运动干扰;
11、步骤5:从校正后的脑电信号中提取特征,以用于疲劳驾驶的分类,对特征进行分类,以检测驾驶员的疲劳状态;
12、步骤6:通过监测疲劳状态的概率或程度,来预测驾驶员是否处于疲劳状态,如果检测到驾驶员处于疲劳状态,采取干预措施。
13、进一步的:所述步骤2包括:
14、使用如下公式进行滤波处理:
15、
16、其中,xfiltered(t)是滤波后的信号,x(t)是原始脑电信号,h(t)是滤波器的冲激响应;
17、h(t)表示为:
18、
19、其中,f是信号的频率,fc是截止频率,n是滤波器的阶数;
20、使用如下公式进行降低运动和头部移动的影响:
21、x=as其中,x是观测到的混合信号矩阵,每一行代表一个通道的观测信号,a是混合矩阵,表示源信号与观测信号之间的线性混合关系,s是源信号矩阵,包含独立的源信号;
22、监测驾驶员的头部和身体运动的运动信息包括:
23、测量头部的线性加速度a(t),积分得到位移,线性加速度a(t)表示为:
24、
25、其中,a(t)是线性加速度,v(t)是速度,t是时间,头部位移d(t)通过对速度进行积分来估计:
26、d(t)=∫v(t)dt
27、进一步的:所述步骤3包括:
28、建立lstm模型,lstm计算过程表示为以下方程:
29、输入门:
30、it=σ(wi·[ht-1,xt]+bi)
31、遗忘门:
32、ft=σ(wf·ht-1,xt]+bf)
33、输出门:
34、ot=σ(wo·[ht-1,xt]+bo)
35、记忆单元更新:
36、ct=ft·ct-1+it·tanh(wc·[ht-1,xt]+bc)
37、隐藏状态更新:
38、ht=ot·tanh(ct)
39、其中,xt是输入数据,为运动估计数据;ht是当前时间步的隐藏状态,包含运动的信息;ct是当前时间步的记忆单元,用于捕获长期依赖关系;it、ft、ot是输入门、遗忘门和输出门的激活;wi、wf、wo、wc是权重矩阵;bi、bf、bo、bc是偏差;
40、准备包括驾驶员的头部和身体运动的历史记录,用于监督学习以训练lstm模型,在训练过程中,使用均方误差作为损失函数,将模型的预测与真实运动数据进行比较,训练过程将通过反向传播和优化算法来更新模型的权重和参数;
41、在每个时间步,将运动估计数据输入到lstm模型中,模型输出当前时间步的预测运动,预测的运动与实际观测到的运动数据进行比较,以便在后续步骤中进行运动校正,从而抵消运动对脑电信号的影响。
42、进一步的:所述步骤4包括:
43、步骤4.1运动校正信号生成:
44、使用训练好的运动模型来预测在没有运动干扰时的脑电信号,运动模型根据当前时间步的运动估计数据生成这些预测信号,使用m(t)表示运动模型,x脑电信号(t)表示在没有运动干扰时的脑电信号,xmotion(t)表示运动估计数据,表示为:
45、xeeg(t)=m(t,xmotion(t))
46、表示在时间步t时,运动模型使用运动估计数据来生成对应的没有运动干扰的脑电信号;
47、步骤4.2信号校正:
48、将预测的运动校正信号从原始脑电信号中减去,以抵消运动干扰,使用xraw(t)为原始的脑电信号,xcor(t)是经过运动校正后的信号,则运动校正表示为:
49、xcor(t)=xraw(t)-xeeg(t)
50、方程表示在时间步t时,通过减去预测的运动校正信号x脑电信号(t),得到了经过校正后的信号xcor(t)。
51、进一步的:所述步骤5包括:
52、提取频谱特征、时域特征和空域特征:
53、频谱特征:使用傅里叶变换将信号从时域转换到频域,提取特定频带的功率或能量,公式表示为:
54、p(f)=∫|x(f)|2df
55、其中,p(f)是频率f上的功率,x(f)是信号在频率f处的复数振幅;
56、时域特征:计算信号的均值、方差、峰度、偏度统计特征,提取信号的时域波形特征,公式表示为:
57、
58、空域特征:使用空域滤波器提取空域特征;
59、特征提取后,使用支持向量机进行分类,以检测驾驶员的疲劳状态,其中1表示疲劳状态,0表示非疲劳状态:
60、y=svm(xfeatures)
61、其中,y是分类结果,xfeatures是从校正后的脑电信号中提取的特征。
62、进一步的:所述步骤6包括:
63、疲劳状态概率估计:使用分类模型的输出概率来估计驾驶员处于疲劳状态的概率,假设分类模型输出的概率为p(疲劳),则可以使用这个概率来监测疲劳状态,如果p(疲劳)较高,则认为驾驶员可能处于疲劳状态;
64、疲劳状态程度估计:通过特征提取步骤中提取的特征来实现;
65、采取干预措施,所述干预措施包括但不限于:
66、1)在车内发出警报,警报可以包括声音警报、语音提示、车内灯光提示、车载振动提示等;
67、2)在车外发出警报,警报可以包括打开双闪、鸣喇叭、降低车速等;
68、3)将报警信息上传至交通监管部门的监管平台,并主动请求与监管平台建立通讯连接,使监管平台的监控人员能够通过车载通讯装置与驾驶员对话,提醒和引导驾驶员排除隐患;
69、4)将报警信息、当前位置、车速信息等发送至路面交警执法人员的执法终端,提醒交警执法人员及时到达现场进行疲劳驾驶执法,降低可能产生的事故风险;
70、5)将报警信息、当前位置、车速信息等发送至交通监管部门的监管平台,申请通过交通信号灯对驾驶线路上的车辆进行管控,让开车道,疏导车流和行人,进一步降低可能产生的事故风险。
71、系统可根据疲劳状态程度的评估结果,按照疲劳状态程度依次启动上述干预措施。
72、本发明与现有技术相比,所取得的技术进步在于:
73、本方法引入了运动估计和运动校正,监测驾驶员的头部和身体运动,并根据运动模型校正脑电信号。这样,即使驾驶员在驾驶过程中频繁移动头部和身体,也能够准确捕获脑电信号。与传统方法相比,能够更好地应对运动引起的不稳定性和干扰。通过采集和分析驾驶员的个性化脑电信号数据,可以根据每位驾驶员的独特特征和基线状况来进行疲劳状态监测。这相对于通用的疲劳预警系统更加准确,因为它考虑了个体差异。本方法中使用了多种特征提取方法,包括频谱、时域和空域特征,以及程度估计,这使得对疲劳状态的评估更加全面。与仅基于疲劳程度的方法相比,可以提供更多关于驾驶员状态的信息。本方法具备实时监测功能,可在疲劳状态发生时立即采取干预措施,以减少事故风险。与仅提供单一预警信号的系统相比,更加及时地应对潜在的危险情况。本方法的概率估计和程度估计模型具有一定的灵活性,可以根据不同的驾驶情境和需求进行调整和优化。这使得系统更加适应不同的驾驶环境和驾驶员特征。
74、综上,本方法通过有效解决运动和头部移动干扰问题,提供了更高的准确性和可靠性,使驾驶员更安全地在道路上行驶。它结合了多维度信息和实时监测,具备个性化和灵活性,相对于传统方法在提高驾驶安全性方面具有显著的优势。并且,由于其使用了多元化的干预手段,与交通监管部门和交通执法人员建立了及时有效的沟通,使得交通监管部门和交通执法人员能够及时获知疲劳驾驶隐患信息,及时的行使其监管职能,在隐患初步存在时,及时干预,排除隐患,也充分的发挥其干预能力,在隐患发展过程中,及时介入,降低风险。
- 还没有人留言评论。精彩留言会获得点赞!