基于幅度解析的电磁定位系统及方法
本发明属于电磁跟踪,具体涉及一种基于幅度解析的电磁定位系统及方法。
背景技术:
1、电磁跟踪是一种利用电磁场在空间分布信息对跟踪目标进行定位的方法,在计算机辅助的小型高精度微创手术导航系统,虚拟现实等领域具有非常广泛的应用,是目标跟踪领域的研究热点。和其他的跟踪方式相比,电磁跟踪具有无损伤、无辐射、无光路遮挡,操作简单方便的特点。但是,传统的电磁跟踪方法一般依赖于磁场源理论模型,存在迭代算法复杂、易受干扰等问题。
2、为解决上述问题,专利201110123757.6提出了一种基于“微处理器的双磁棒旋转搜索电磁定位系统”,这种方法不依赖于磁场源理论模型,采用简单的几何算法即可实现定位;但该方法的旋转磁场是通过步进电机控制螺旋管的旋转实现磁场的旋转,速度受步进电机带动螺线管旋转速度的限制,系统的实时性较差。为提高系统的定位速度,专利zl201510123915.6提出了一种“基于最大磁感应强度矢量旋转角快速测定的电磁跟踪方法及系统”;通过测定最大磁感应强度矢量旋转角,实现对目标的定位。该方法提高了系统的定位速度,但极易受噪声干扰。为兼顾高精度、高速度,专利201810298617.4提出一种基于鉴相技术的电磁定位系统及方法,在保持系统定位精度的基础上改善抗干扰性能的电磁定位系统,但定位速度仍有提升空间。为进一步提高定位精度、定位速度,专利202310401074.5提出基于相位解析的电磁定位系统,在保持定位精度不变的情况下将定位时间缩短至1/3。
技术实现思路
1、本发明的目的在于提供一种既能提高定位精度和抗干扰能力,又能提定位速度的电磁定位系统及方法。
2、本发明是在专利202310401074.5的基础上,进一步提供一种用六种不同频率的交流恒流源同时激励系统的两个磁场源;获得三轴磁传感器(定位目标)检测到的磁感应强度矢量,分析提取位置信息,进一步提高电磁定位系统的定位速度和定位精度。
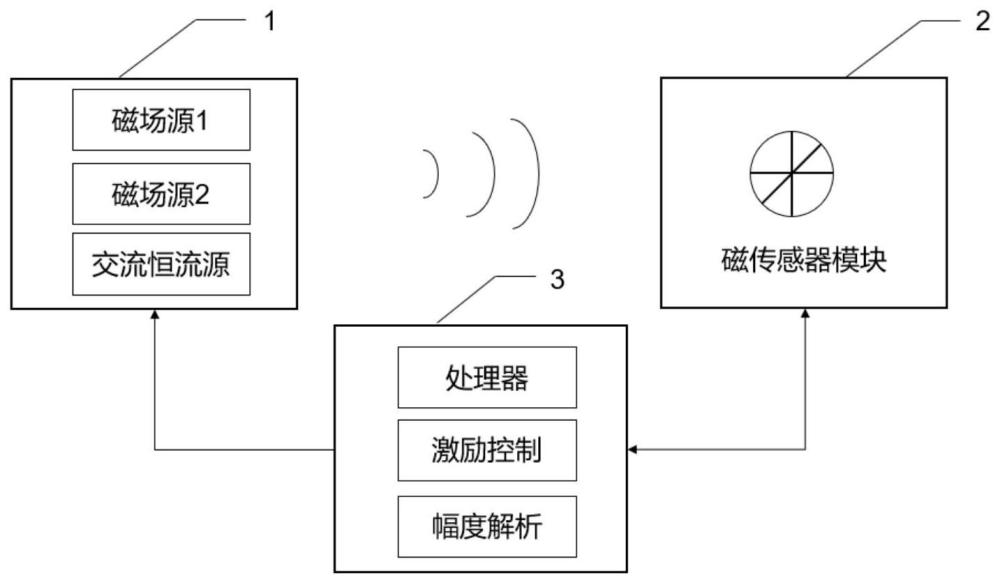
3、本发明提出的基于幅度解析技术的电磁定位系统,由如下三个部分组成:磁场源模块,磁传感器模块以及控制模块;其中:
4、所述磁场源模块,包含磁场源和交流恒流源;所述磁场源由两个相对位置和姿态已知、组成和结构完全相同的三轴正交线圈组成,两个三轴正交线圈记为s1和s2;所谓三轴正交线圈是由三个缠绕在磁芯上的、中心点重合且相互正交的线圈组成;线圈通电后即产生磁场;所述交流恒流源由恒流源及相关控制电路组成,为构成磁场源的线圈提供激励电流,即交流恒流源在控制模块的控制下按一定顺序输出一定频率的正余弦电流激励磁场源的各线圈;
5、所述磁传感器模块,包含一个三轴磁传感器以及相应的信号调理电路;所述三轴磁传感器附着于被定位目标,用于测量定位目标所处位置的三轴正交磁感应强度,将检测到的结果输入到信号调理电路中;信号调理电路对三轴磁传感器检测到的数据进行滤波和放大;
6、所述控制模块,包含激励控制电路、采样电路与a/d转换以及微处理器;所述激励控制电路在微处理器的控制下实现对磁场源各线圈激励电流的通断;所述采样电路与a/d转换电路对磁传感器输出的三路模拟信号采样并将其转换为数字信号,并输入到微处理器中进行处理;所述微处理器首先将采样得到的三路信号合成磁感应强度信号,并进行平方运算得到信号i;再对信号i进行幅度解析运算,得到特定频率位置的幅度值;再根据特定频率位置的幅度比,提取出位置信息,实现对目标点的跟踪定位。
7、定义本发明所述电磁定位系统的相关概念如下:
8、磁场源:s1由三个相互正交的线圈(s11、s12、s13)组成;s2由三个相互正交的线圈(s21、s22、s23)组成;
9、坐标系:坐标系1为全局坐标系,其三个坐标轴x1、y1、z1分别与组成s1的三个相互正交的线圈(s11、s12、s13)的轴线重合,坐标系原点(0,0,0),对应于组成s1的三个线圈重合的中心点;坐标系2的三个坐标轴x2、y2、z2分别与组成s2的三个相互正交的线圈(s21、s22、s23)的轴线重合,组成s2的三个线圈重合的中心点位于坐标系2的原点,坐标系2的原点位于为全局坐标系的(d,0,0)点,即两个磁场源装置中心点之间的距离为d;此外,x1、x2相互平行但方向相反;y1与y2、z1与z2相互平行且方向相同。
10、待测目标的位置表示:待测目标p在坐标系1中的坐标表示为(x1,y,z),在坐标系2中的坐标表示为(x2,y,z),其中x1和x2之和为的d。
11、为实现对磁传感器的定位,通过以下幅度解析技术获取两组磁传感器检测到的特定频率信号的幅度比值,据此计算出磁传感器位置坐标。
12、对线圈s11、s12和s13分别施加幅度为a、相位为0、角频率为w11、w12和w13的余弦激励信号acos w11t、acosw12t和acosw13t;再用幅度为a,相位为0、角频率分别为w21、w22和w23的余弦信号acosw21t、acosw22t和acosw23t激励线圈s21、s22和s23。
13、此时,s1在磁传感器处所形成的合成磁感应强度记为b1,b1在磁传感器三个正交轴的分量依次记为b1x,b1y,b1z;s2在磁传感器处所形成的合成磁感应强度记为b2,b2在此磁传感器三个正交轴的分量记为b2x,b2y,b2z;两个磁场源在三轴磁传感器处产生的总磁感应强度记为b,b为b1、b2的矢量和。
14、磁传感器在坐标系1的坐标为(x1、y、z),其与坐标系1原点之间的距离为r1,有r12=x12+y2+z2;利用磁偶极子公式求解磁传感器各轴检测到的s1产生的磁感应强度如式(1):
15、
16、其中,k1为常系数;
17、于是,对s1所形成的合成磁感应强度b1进行平方运算得到的信号1如式(2):
18、
19、当磁传感器空间位置确定时,m1为常量;
20、由式(2)知:此时传感器检测到的合成磁感应强度b1的平方包含角频率为w11+w12、w11-w12、w11+w13、w11-w13、w12+w13和w12-w13的余弦信号;本发明选取角频率为w11+w12、w11+w13和w12+w13的余弦信号,提取这三个特定频率信号的幅值3x1y、3x1z和3yz,并由式(3)计算出所选频率信号的两个幅度比r11、r12。
21、
22、磁传感器在坐标系2的坐标为(x2、y、z),其与坐标系2原点之间的距离为r2,有r22=x22+y2+z2;利用磁偶极子公式求解磁传感器各轴检测到的s2产生的磁感应强度如式(4):
23、
24、其中,k2为常系数。
25、于是,对s2所形成的合成磁感应强度b2进行平方运算得到的信号2,如式(5):
26、
27、当磁传感器空间位置确定时,m2为常量。
28、由式(5)知:此时传感器检测到的合成磁感应强度b2的平方,其包含角频率为w21+w22、w21-w22、w21+w23、w21-w23、w22+w23和w22-w23的余弦信号;本发明选取角频率为w21+w22、w21+w23和w22+w23的余弦信号,提取这三个特定频率信号的幅值3x2y、3x2z和3yz,并由式(6)计算出所选频率信号的两个幅度比r21、r22:
29、r21=3x2z/3yz=x2/y,r22=3x2y/3yz=x2/z; (6)
30、已知待测目标相对于s1和s2的两组幅度比(r11、r12)、(r21、r22)、以及两磁场源中心点之间的距离d,待测目标在系统坐标系中的位置坐标算式(x、y、z)可由式(7)计算(其中x=x1):
31、
32、从三轴磁传感器检测到的合成磁感应强度的平方(信号i)中提取两组幅度比(r11、r12)、(r21、r22),具体如下:
33、采用数字或模拟的方式获取信号1的复频域信息:对信号i进行fft运算,将信号i解析成是由不同频率、幅值,相位的余弦波。选取合适的频率,保证其频率独立且不与其他频率混叠避免不必要的干扰然后提取其幅值:假设采样频率为fs,采样点数为n,fft后,某一点n(n从1开始)表示的频率为:fn=(n-1)fs/n,该频率在复频域所对应的模为yn,则该频率信号在时域的幅值为2yn/n。即为该频率信号的幅值。
34、综上,本发明基于幅度解析的电磁定位方法,具体操作流程如下:
35、(1)对线圈s11、s12和s13分别施加幅度为a、相位为0、角频率为w11、w12和w13的余弦激励信号acos w11t、acos w12t和acos w13t;再用幅度为a,相位为0、角频率分别为w21、w22和w23的余弦信号acos w21t、acos w22t和acos w23t激励线圈s21、s22和s23;
36、(2)对三轴磁传感器模块的三路模拟输出进行严格同步的采样后输入控制模块;
37、(3)控制模块计算出磁传感器检测到的s1和s2在磁传感器处产生的合成磁感应强度的平方记为信号i;
38、(4)对信号i进行fft运算,提取出信号i中角频率为w11+w12、w11+w13、w12+w13、w21+w22、w21+w23和w22+w23的六个余弦信号的幅值:假设采样频率为fs,采样点数为n,fft后,某一点n(n从1开始)表示的频率为:fn=(n-1)fs/n,该频率在复频域所对应的模为yn,则该频率信号在时域的幅值为2yn/n,即为该频率信号的幅值;
39、(5)利用幅度比关系式(3)、(6),以及两磁场源中心点之间的距离d,根据公式(7)计算求得磁场传感器装置的空间位置坐标。
40、本发明所提出的基于幅度解析技术确定定位目标的方法,其激励信号为幅值恒定、频率恒定、相位为0的余弦信号。系统通过解析磁传感器检测到的合成磁感应强度平方信号的复频域信息,提取特定信号的幅度,根据公式(3)、(6)计算幅度比,继而根据公式(7)实现对目标的定位。
41、采用本发明提出的幅度解析技术同时用6个不同频率的交流恒流源激励s1、s2获得特定频率成分的幅度比;进而计算三轴磁传感器(目标点)的坐标位置,经过1次激励即可获得定位所需的所有信息。本发明测量精度高、定位速度快、抗干扰能力强,可应用于计算机辅助的小型高精度微创手术的导航,三维超声成像等领域。与专利202310401074.5所述技术相比,在相同激励信号频率的条件下,定位速度提高1倍,定位精度提升1/3,系统复杂度进一步降低。
- 还没有人留言评论。精彩留言会获得点赞!