机器人控制方法及装置、机器人与流程
本公开属于智能控制,更具体地说,是涉及一种机器人控制方法及装置、机器人。
背景技术:
1、下肢康复机器人能够带动用户下肢运动、辅助用户行走,目前已经广泛地应用到康复护理、假肢和康复治疗等方面,帮助残疾用户重新恢复运动功能,带来回归社会的希望。然而现有的下肢康复机器人都是基于固定的步态轨迹进行控制,在与不同用户的配合行走过程中,容易出现步态不适的问题,需要进一步改进。
技术实现思路
1、本公开的目的在于提供一种机器人控制方法及装置、机器人,以解决现有的下肢康复机器人容易出现步态不适的问题。
2、本公开实施例的第一方面,提供了一种机器人控制方法,包括:
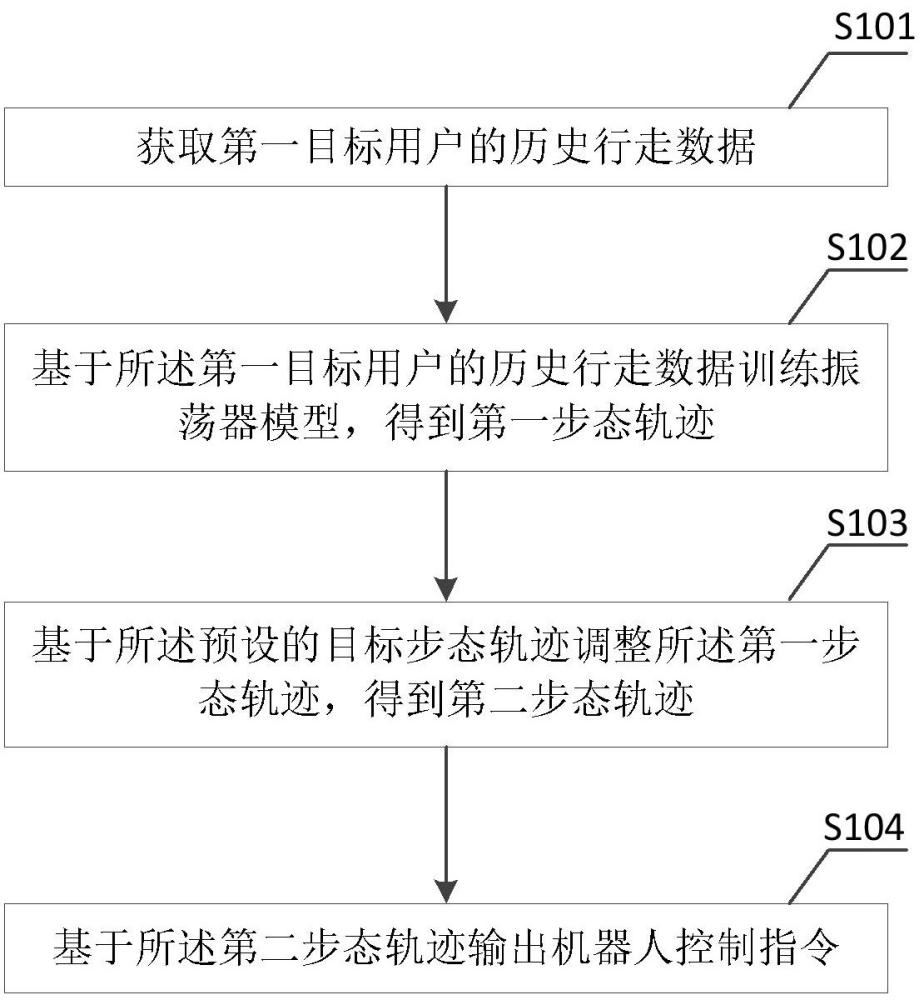
3、获取第一目标用户的历史行走数据;
4、基于所述第一目标用户的历史行走数据训练振荡器模型,得到第一步态轨迹;
5、基于所述预设的目标步态轨迹调整所述第一步态轨迹,得到第二步态轨迹;
6、基于所述第二步态轨迹输出机器人控制指令。
7、本公开实施例的第二方面,提供了一种机器人控制装置,包括:
8、数据获取单元,用于获取第一目标用户的历史行走数据;
9、数据处理单元,用于基于所述第一目标用户的历史行走数据训练振荡器模型,得到第一步态轨迹;
10、第一计算单元,用于基于所述预设的目标步态轨迹调整所述第一步态轨迹,得到第二步态轨迹;
11、指令输出单元,用于基于所述第二步态轨迹输出机器人控制指令。
12、本公开实施例的第三方面,提供了一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的机器人控制方法的步骤。
13、本公开实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的机器人控制方法的步骤。
14、本公开实施例提供的机器人控制方法及装置、机器人的有益效果在于:
15、本公开实施例通过获取第一目标用户在多次训练过程中的历史行走数据得到第一步态轨迹,第一步态轨迹能够表征第一目标用户当前的行走能力。在第一步态轨迹的基础上,根据第一步态轨迹和目标步态轨迹之间的差距,得到第二步态轨迹,并根据第二步态轨迹进行机器人的控制。这样的控制方法能够结合第一目标用户的实际情况逐步调整第二步态轨迹,避免第一目标用户出现不适情况,提升用户体验;而且,在多次训练过程中,第一步态轨迹和目标步态轨迹之间的差距逐步减小,最终实现第二步态轨迹逐步接近目标步态轨迹。
技术特征:
1.一种机器人控制方法,其特征在于,包括:
2.如权利要求1所述的机器人控制方法,其特征在于,所述基于所述预设的目标步态轨迹调整所述第一步态轨迹,得到第二步态轨迹,包括:
3.如权利要求2所述的机器人控制方法,其特征在于,所述基于各个第一步态子轨迹对应的第一差值确定各个第一步态子轨迹对应的预设正相关系数,包括:
4.如权利要求1所述的机器人控制方法,其特征在于,所述第二步态轨迹包括髋关节角度-时间曲线和膝关节角度-时间曲线,在所述基于所述第二步态轨迹输出机器人控制指令之前,还包括:
5.如权利要求1所述的机器人控制方法,其特征在于,所述基于所述第二步态轨迹输出机器人控制指令,包括:
6.如权利要求1所述的机器人控制方法,其特征在于,所述机器人控制方法还包括:
7.一种机器人控制装置,其特征在于,包括:
8.一种机器人,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述方法的步骤。
9.如权利要求8所述的机器人,其特征在于,还包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述方法的步骤。
技术总结
本公开提供了一种机器人控制方法及装置、机器人,该方法包括:获取第一目标用户的历史行走数据;基于所述第一目标用户的历史行走数据训练振荡器模型,得到第一步态轨迹;基于所述预设的目标步态轨迹调整所述第一步态轨迹,得到第二步态轨迹;基于所述第二步态轨迹输出机器人控制指令。本公开提供的机器人控制方法及装置、机器人解决了现有的下肢康复机器人容易出现步态不适的问题。
技术研发人员:李挥,吴少帅,杜胜利,王月英,周丽
受保护的技术使用者:河北省药品医疗器械检验研究院(河北省化妆品检验研究中心)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!