线性精度控制装置、控制方法及注射泵与流程
本申请涉及医疗设备,尤其是一种线性精度控制装置、控制方法及注射泵。
背景技术:
1、注射泵是一种自动注射装置,其主要通过精确控制注射器活塞柄的进给来实现自动注射,主要用于体外诊断仪器进液和临床高精度输液。
2、相关技术中,注射泵的线性精度控制是基于高精度的编码器对起进行位置检测或利用码盘进行线性精度检测。然而,编码器容易受外界环境污染物干扰,导致精度受损甚至是故障,利用码盘进行线性精度检测存在精度低的缺陷,码盘自身尺寸和光耦装配的误差,使得注射泵的精度进一步下降。
3、因此,注射泵的线性精度检测方法不能同时兼顾高精度和抗干扰。
技术实现思路
1、本申请的目的是提供一种线性精度控制装置、控制方法及注射泵,旨在提升注射泵线性精度检测的精度和抗干扰性能。
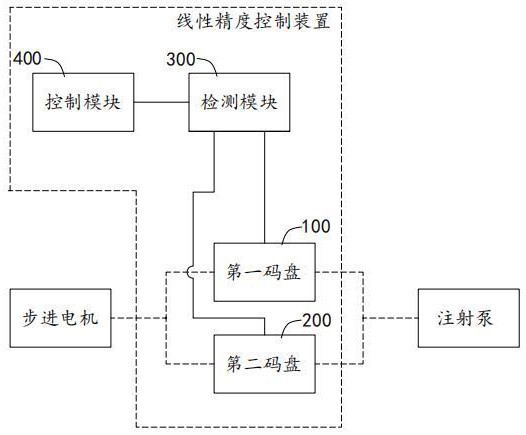
2、本申请实施例提供一种线性精度控制装置,应用于注射泵,包括:
3、第一码盘,具有多个第一码齿,与步进电机传动连接,以从所述步进电机获得成比例的转动量;
4、第二码盘,具有多个与所述第一码齿相互错开的第二码齿,与所述步进电机传动连接,以从所述步进电机获得与所述第一码盘相同的转动量;
5、检测模块,用于检测经过检测区域的所述第一码齿和所述第二码齿,生成检测信号;以及
6、控制模块,用于生成第一脉冲信号以控制所述步进电机驱使所述注射泵复位,在所述步进电机匀速复位时,依据所述检测信号生成补偿信号,使用所述补偿信号拟合出第二脉冲信号,使用所述第二脉冲信号驱动所述步进电机,以响应所述注射泵的注射动作。
7、在一些实施例中,所述第一码齿和所述第二码齿相互错开90°。
8、在一些实施例中,所述第一码齿和所述第二码齿分别为通槽结构;
9、所述检测模块为光耦检测器件,所述检测模块检测所述第一码齿和所述第二码齿经过检测区域时的光信号并产生相应电平形式的检测信号。
10、在一些实施例中,所述控制模块,包括:
11、定时单元,用于在所述步进电机匀速转动时,按照预设的时间间隔对所述检测信号的脉冲触发数量进行计数,得到计数结果;
12、控制单元,用于依据所述计数结果确定所述步进电机的真实转动量,依据所述真实转动量生成所述补偿信号,在接收到注射指令时生成注射脉冲信号,依据所述补偿信号和所述注射脉冲信号拟合出所述第二脉冲信号;以及
13、电机驱动单元,用于依据所述第一脉冲信号驱动所述步进电机,以驱使所述注射泵复位,或依据所述第二脉冲信号驱动所述步进电机,以响应所述注射泵的注射动作。
14、本申请实施例还提供一种线性精度控制方法,应用于上述的线性精度控制装置,所述控制模块执行所述线性精度控制方法,包括:
15、接收复位指令,生成第一脉冲信号并输出至所述步进电机;
16、接收所述检测信号,依据所述检测信号,确定所述注射泵的预设复位距离;
17、依据所述检测信号和所述第一脉冲信号,计算第一真实距离和第二真实距离,确定所述注射泵的实际复位距离;所述第一真实距离为各所述第一码齿之间的检测距离,所述第二真实距离为各所述第二码齿之间的检测距离;
18、接收注射指令,生成相应的注射脉冲信号;
19、依据所述预设复位距离和所述实际复位距离之间的偏差,生成补偿信号;
20、使用所述补偿信号对所述注射脉冲信号进行拟合处理,得到所述第二脉冲信号,输出所述第二脉冲信号至所述步进电机,以响应所述注射泵的注射动作。
21、在一些实施例中,所述依据所述检测信号和所述第一脉冲信号,计算第一真实距离和第二真实距离,确定所述注射泵的实际复位距离,包括:
22、在所述步进电机匀速转动时,采集第一时长和第二时长;所述第一时长为相邻两所述第一码齿先后被检测到之间的时长,所述第二时长为相邻两所述第二码齿先后被检测到之间的时长;
23、依据所述第一脉冲信号,确定转子速度;
24、依据所述第一时长、所述第二时长和所述转子速度,计算所述实际复位距离。
25、在一些实施例中,所述依据所述第一时长、所述第二时长和所述转子速度,计算所述实际复位距离,包括:
26、计算各所述第一时长之和,得到第一总时长;
27、计算各所述第二时长之和,得到第二总时长;
28、对所述第一总时长和所述第二总时长进行加权求和运算,得到真实时长;
29、依据所述真实时长和所述转子速度,计算所述步进电机的真实转动量;
30、依据所述步进电机和所述注射泵之间的传动比例系数以及所述真实转动量,确定所述实际复位距离。
31、在一些实施例中,所述依据所述预设复位距离和所述实际复位距离之间的偏差,生成补偿信号,包括:
32、计算所述预设复位距离和所述实际复位距离之差,得到复位差值距离;
33、计算所述复位差值距离相对于所述预设复位距离的比例,得到差值比例;
34、依据所述差值比例和所述注射脉冲信号,确定所述补偿信号;
35、所述补偿信号的计算公式为:
36、a=a1+a2+a3+...+an,
37、a1=b×a′,
38、(ai+1)/ai=b,
39、an+1<1,
40、其中,a为补偿信号所对应的步数,a′为注射脉冲信号所对应的步数,b为差值比例,ai为i阶补偿信号所对应的步数,i=1,2,3,...,n,n+1。
41、在一些实施例中,所述使用所述补偿信号对所述注射脉冲信号进行拟合处理,得到所述第二脉冲信号,包括:
42、将所述补偿信号拆分为三份,得到三组局部补偿信号;
43、将所述局部补偿信号分别增加于所述注射脉冲信号的加速区域、匀速区域和减速区域,或分别从所述加速区域、所述匀速区域和所述减速区域中减去,得到所述第二脉冲信号。
44、本申请实施例还提供一种注射泵,包括上述的线性精度控制装置。
45、本申请的有益效果:同时使用第一码盘和第二码盘相互错开地获取步进电机的转动量,通过检测步进电机匀速复位时第一码盘的转动量和第二码盘的转动量,生成检测信号,依据检测得到的检测信号生成补偿信号,使用补偿信号拟合出驱使步进电机响应注射泵的注射动作的第二脉冲信号,由于同时使用第一码盘和第二码盘,可以确定步进电机的转动量和转动方向,且不受外界温湿度和/或灰尘等影响检测准确性,提升注射泵线性精度检测的精度和抗干扰性能,且在匀速复位过程转动量检测和生成补偿信号,将补偿信号拟合用于响应注射动作的第二脉冲信号,提升注射泵的注射精度。
技术特征:
1.一种线性精度控制装置,应用于注射泵,其特征在于,包括:
2.根据权利要求1所述的线性精度控制装置,其特征在于,所述第一码齿和所述第二码齿相互错开90°。
3.根据权利要求1所述的线性精度控制装置,其特征在于,所述第一码齿和所述第二码齿分别为通槽结构;
4.根据权利要求1所述的线性精度控制装置,其特征在于,所述控制模块,包括:
5.一种线性精度控制方法,应用于权利要求1至4任一项所述的线性精度控制装置,其特征在于,所述控制模块执行所述线性精度控制方法,包括:
6.根据权利要求5所述的线性精度控制方法,其特征在于,所述依据所述检测信号和所述第一脉冲信号,计算第一真实距离和第二真实距离,确定所述注射泵的实际复位距离,包括:
7.根据权利要求6所述的线性精度控制方法,其特征在于,所述依据所述第一时长、所述第二时长和所述转子速度,计算所述实际复位距离,包括:
8.根据权利要求5所述的线性精度控制方法,其特征在于,所述依据所述预设复位距离和所述实际复位距离之间的偏差,生成补偿信号,包括:
9.根据权利要求5所述的线性精度控制方法,其特征在于,所述使用所述补偿信号对所述注射脉冲信号进行拟合处理,得到所述第二脉冲信号,包括:
10.一种注射泵,其特征在于,包括权利要求1至4任一项所述的线性精度控制装置。
技术总结
本申请涉及医疗设备技术领域,公开一种线性精度控制装置、控制方法及注射泵。线性精度控制装置包括第一码盘、第二码盘、检测模块和控制模块;第一码盘具有多个第一码齿,可从步进电机获得成比例的转动量;第二码盘具有多个与第一码齿相互错开的第二码齿,可从步进电机获得与第一码盘相同的转动量;检测模块用于检测经过检测区域的第一码齿和第二码齿,生成检测信号;控制模块用于生成第一脉冲信号以控制步进电机驱使注射泵复位,在步进电机匀速复位时,依据检测信号生成补偿信号,使用补偿信号拟合出第二脉冲信号,使用第二脉冲信号驱动步进电机,以响应注射泵的注射动作。本申请实施例可以提升注射泵线性精度检测的精度和抗干扰性能。
技术研发人员:张少维,吕晓俊,许修耀,王奥林
受保护的技术使用者:深圳市恒永达科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!