一种截骨矫形手术截骨角度的设计系统、设备及其应用
本发明涉及脊柱矫形,具体涉及一种截骨矫形手术截骨角度的设计系统、设备及其应用。
背景技术:
1、脊柱后凸是脊柱的一些部分向前或向背后移位以产生弯曲或“驼背”的一种脊柱畸形,脊柱后凸会引起矢状位失衡,脊柱矢状位平衡在维持人体整体力线和运动功能方面具有重要作用,在平衡状态下人体能够获得最高的能量使用效率。而脊柱后凸畸形患者通常躯干前倾,视野受限,严重影响生活,只能通过骨盆后旋、伸髋屈膝来尽可能把躯干试图拉回到正常状态,但往往也是失平衡状态。因此,对脊柱后凸患者科学的截骨矫形意义重大。
2、截骨矫形需要遵循:(1)平衡状态:整体平衡,脊柱-骨盆平衡,各部位之间平衡,并且获得满意视觉。(2)各部位设计要符合约束条件,即矫形后恢复各部位应有的形态,如正常腰椎前凸、胸椎后凸等等。(3)合理的选择截骨位置,截骨角度等。
3、脊柱盆腔参数对于评价手术治疗的效果和手术方案的设计至关重要,其中矢状面纵轴(sagittal vertical axis,sva)是指c7铅垂线至骶骨后上角的距离,专利cn112402075a中将sva作为指定手术计划和评估矢状面平衡恢复的标准,但诸多研究表明c7铅垂线并非躯干重心,也提示了用sva来制定手术方案的不科学性(lafage v,schwab f,patela,hawkinson n,farcy jp.pelvic tilt andtruncal inclination:two keyradiographic parameters in the setting ofadults with spinal deformity.spine(phila pa 1976).2009aug 1;34(17):e599-606.)。
4、另外关于脊柱截骨方式的论述中操作过程复杂,对于入门级医生来说相对晦涩,并且每次都需要重新测量相关参数,费时费力。因此,本技术拟设计一种简单快速的脊柱后凸截骨矫形设计方法与原理,尤其是截骨角度的计算,并拟提供预期理想的操作界面。
技术实现思路
1、本发明第一方面,提供了一种针对脊柱后凸的截骨矫形手术截骨角度的设计系统,所述的设计系统包括:
2、a)输入模块:输入的数据包括脊柱数据,所述的脊柱数据包括股骨头圆心与截骨顶点的距离、股骨头圆心与c2齿状突尖的距离;
3、b)数据处理模块:通过输入的数据计算截骨角度;
4、c)输出模块:输出计算出的截骨角度。
5、所述的脊柱数据还包括骨盆入射角pi和骨盆倾斜角pt。
6、所述的pi为人体固有参数,不论畸形程度如何,pi都不会发生变化。
7、优选的,所述的骨盆倾斜角pt包括测量的mpt与理想状态的ipt。
8、优选的,ipt=0.44×pi-11.4。
9、所述的截骨顶点为一个或两个及以上,例如1、2、3、4、5、6、7、8、9或10个或其以上。优选的,所述的截骨顶点为两个。
10、优选的,所述的截骨顶点位于脊柱上,且以股骨头为原点,沿脊柱顺延由近及远依次命名为第一截骨顶点、第二截骨顶点......第n截骨顶点;或者近端截骨顶点、远端截骨顶点。相应的,截骨角度以股骨头为原点,沿脊柱顺延由近及远依次命名为第一截骨角度、第二截骨角度......第n截骨角度;或者近端截骨角度、远端截骨角度。
11、所述的数据处理模块包括通过脊柱数据以及近端截骨角度计算远端截骨角度。
12、所述的近端截骨角度根据临床经验获取,所述的近端截骨角度为30°-60°范围内任一数值,优选的,所述的近端截骨角度为35°-50°范围内任一数值,例如30°、35°、40°、41°、42°、43°、44°、45°、46°、47°、48°、49°、50°、52°、54°、56°、58°、60°。
13、本发明的一个具体实施方式中,所述的近端截骨角度为45°。
14、所述的近端截骨顶点根据临床经验获得,所述的近端截骨顶点的位置包括第二腰椎、第三腰椎或第四腰椎,优选的,所述的近端截骨顶点的位置为第二腰椎或第三腰椎。
15、所述的远端截骨顶点根据临床经验获得,所述的远端截骨顶点的位置包括t2-l1范围内任一位置,例如第二胸椎、第三胸椎、第四胸椎、第五胸椎、第六胸椎、第七胸椎、第八胸椎、第九胸椎、第十胸椎、第十一胸椎、第十二胸椎、第一腰椎。
16、本发明的一个具体实施方式中,所述的近端截骨顶点为第三腰椎,所述的远端截骨顶点为第一腰椎。
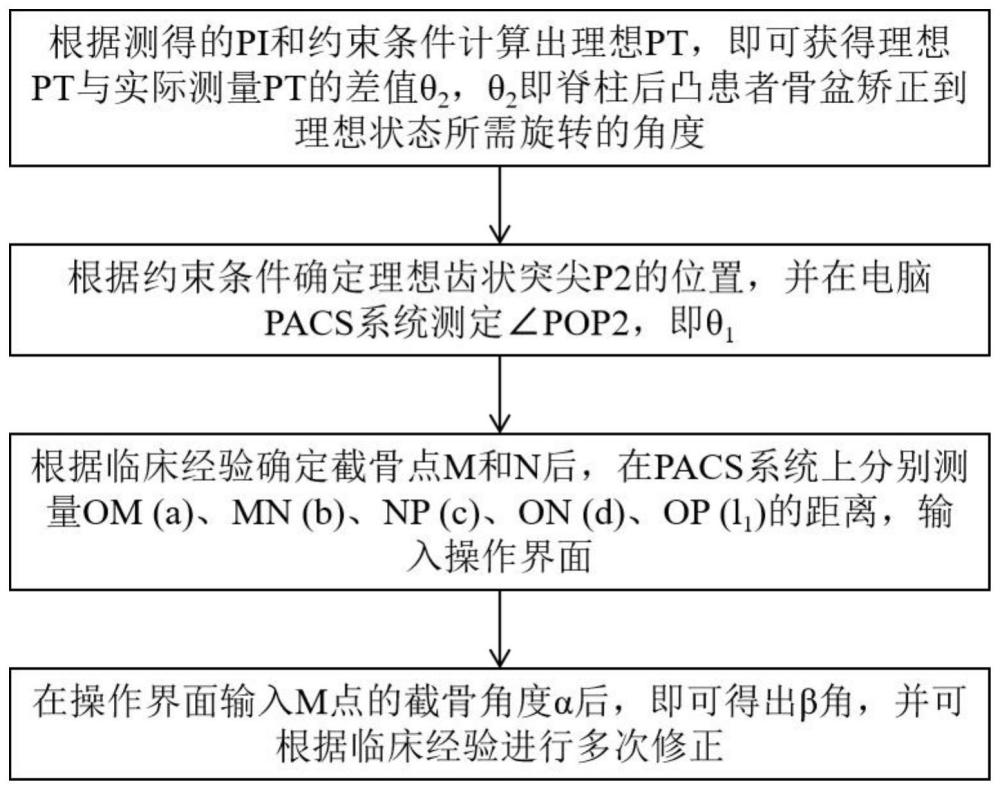
17、在本发明的一个具体实施方式中,所述的脊柱数据包括股骨头圆心o与近端截骨顶点m的距离(om)、近端截骨顶点m与远端截骨顶点n的距离(mn)、远端截骨顶点n与c2齿状突尖p的距离(np)、股骨头圆心o与远端截骨顶点n的距离(on)、股骨头圆心o与c2齿状突尖p的距离(op)、骨盆入射角(pi)和骨盆倾斜角(pt)。
18、所述的脊柱数据从脊柱后凸患者的脊柱全长侧位图像中获得;优选的,所述的脊柱全长侧位图像来源于pacs系统。
19、进一步优选的,所述的脊柱全长侧位图像来源于pacs系统中包括核磁共振仪、ct探测仪、超声波诊疗仪器、x光机、红外仪或显微仪设备产生的图像,更进一步优选的,所述的脊柱全长侧位图像为pacs系统中x光机产生的图像。
20、所述的脊柱数据还包括从图像上测得的∠pop2,o为股骨头圆心,p为截骨前c2齿状突尖的位置,p2为经过截骨后c2齿状突尖的位置。优选的,经过截骨后c2齿状突尖的位置p2和股骨头的连线与铅垂线的夹角为-5°~2°。
21、所述的脊柱数据包括从脊柱全长侧位图像中测量获得的数据和计算获得的数据。
22、所述的测量获得的数据包括om、mn、np、on、op的长度数据和∠pop2、pi、mpt的角度数据,所述的计算获得的数据包括ipt的角度数据。
23、需要截骨矫形手术的患者为强直性脊柱炎、脊柱结核、外伤引起的脊柱向后凸起畸形、先天性脊柱后凸、脊髓前灰白质炎、佝偻病性驼背、氟骨症、原发性骨质疏松症或次发性骨髓骨软骨病。
24、本技术关于截骨的设计系统,基于的标准为整体平衡、骨盆平衡、脊柱各节段平衡和视野正常。且经过试验证实确实达到标准。
25、所述的整体平衡通过od-ha表示(c2齿状突尖与股骨头连线,与铅垂线的夹角),正常为-5~2°。
26、所述骨盆平衡的参数包括pi和pt。
27、所述脊柱各节段平衡的参数包括包括胸椎前凸(lumbar lordosis,ll)、胸腰段后凸角(thoracolumbar kyphosis,tlk)、胸椎后凸(thoracic kyphosis,tk)、脊柱-颅骨角(spino-cranial angle,sca)。
28、所述的ll为第一腰椎(l1)上终板与第一骶骨(s1)上终板的cobb角,所述的ll=0.54×pi+27.6°。
29、所述的tlk为第十胸椎(t10)上终板与第二腰椎(l2)下终板的cobb角,所述的tlk正常范围为0±15°。
30、所述的tk为第四胸椎(t4)上终板与第十二胸椎(t12)上终板的cobb角,所述的tk正常范围为10°~40°。
31、所述的sca为第七颈椎(c7)上终板与蝶鞍中点的连线,所述的sca正常范围为83°±9°。
32、所述的脊柱各节段平衡参数还包括l4-s1和t1-t12;
33、所述的l4-s1为第四腰椎(l4)上终板与第一骶骨(s1)上终板的cobb角,所述的l4-s1=0.66×ll;
34、所述的t1-t12为第一胸椎(t1)上终板与第十二胸椎(t12)下终板的cobb角,所述的t1-t12=0.75×ll。
35、所述的视野正常用颌眉角(cbva)表示,其正常范围为-20°~20°中的任一数值,优选-20°~5°中的任一数值,进一步优选-20°~0°中的任一数值或-15~5°中的任一数值。
36、本发明第二方面,提供了一种计算机设备,所述的计算机设备包含上述设计系统。
37、所述的计算机设备包括存储器,所述的存储器用于存储脊柱数据和计算获得的截骨角度。
38、所述的计算机设备至少包括一个处理器,所述的处理器可执行上述设计系统。
39、本发明第三方面,提供了一种上述设计系统或计算机设备在制备截骨矫形定位模具或导板中的应用。
40、本发明的第四方面,提供了一种截骨矫形定位模具或导板的制备方法,所述的制备方法包括通过上述的设计系统确定截骨角度,然后制备截骨矫形定位模具或导板。
41、本发明的第五方面,提供了一种脊柱后凸的治疗方法或截骨矫形的手术方法,所述的治疗方法或手术方法包括获取脊柱全长侧位图像,然后测量脊柱数据,输入第一方面的设计系统计算出截骨角度,然后进行手术截骨矫形。
42、所述脊柱后凸包括强直性脊柱炎、脊柱结核、外伤引起的脊柱向后凸起畸形、先天性脊柱后凸、脊髓前灰白质炎、佝偻病性驼背、氟骨症、原发性骨质疏松症或次发性骨髓骨软骨病。
43、以上只是概括了本发明的一些方面,不是也不应该认为是在任何方面限制本发明。
44、本技术提到的所有专利和出版物都是通过参考文献作为整体而引入本发明的。本领域的技术人员应认识到,对本发明可作某些改变并不偏离本发明的构思或范围。下面的实施例进一步详细说明本发明,不能认为是限制本发明或本发明所说明的具体方法的范围。
- 还没有人留言评论。精彩留言会获得点赞!