一种微感反馈的智能膝盖康复护理方法与装置与流程
本发明涉及微感反馈的,尤其涉及一种微感反馈的智能膝盖康复护理方法与装置。
背景技术:
1、随着国家倡导体育强国的不断推广,运动性膝盖损伤严重影响人们健康和生活质量。对膝盖进行手术并实施康复训练成为膝盖康复护理关键的环节。大多数患者因疼痛不能进行有效而持久的肌力训练和关键活动度锻炼。现有康复护理方案无法有效追踪患者康复锻炼依从性及康复效果,尤其是膝盖这种精细化康复治疗方案对当前患者的恢复状态需要有精准的判断,否则会产生二次损伤。针对该问题,本发明提出一种微感反馈的智能膝盖康复护理方法与装置,通过检测微弱神经信号指导反馈康复护理设备参数,实现智能化膝盖康复护理。
技术实现思路
1、有鉴于此,本发明提供一种微感反馈的智能膝盖康复护理方法与装置,目的在于:1)构建小波函数、滤波器对所采集的腿部神经信号进行滤波分解处理,得到多尺度的近似系数以及细节系数,利用原发性神经信号特征提取模型对包含更多能量信息的近似系数进行特征提取处理,首先利用伪迹去除层对原发性神经信号进行主成分提取处理,过滤原发性神经信号中可能存在的伪迹信号,保证提取处理后的信号为纯净的腿部神经信号,进而采用提取多尺度近似系数卷积特征空间感知信息的方式,进行多尺度的卷积特征以及空间感知信息的融合处理,得到空间感知的神经信号特征,有利于表征腿部神经信号异常;2)利用康复步态校正模型对神经信号特征进行映射,生成膝盖护理校正参数,其中腿部神经信号的异常程度越大,对应的神经信号特征分布就越异常,根据神经信号特征分布的异常性,在患者步态姿势参数的基础上进行校正参数生成,进而对患者步行过程中的腿部膝盖姿势进行实时监测,将监测结果作为步态姿势参数对膝盖护理校正参数进行遍历,遍历得到对应的校正参数,根据校正参数提醒患者调整膝盖弯曲幅度以及弯曲速度,实现基于患者腿部神经微感反馈的膝盖动作康复校正护理。
2、为实现上述目的,一方面,本发明提供了一种微感反馈的智能膝盖康复护理方法,包括以下步骤:
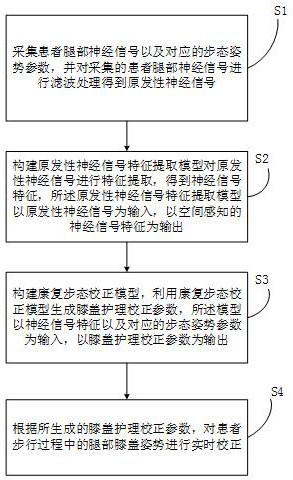
3、s1:采集患者腿部神经信号以及对应的步态姿势参数,并对采集的患者腿部神经信号进行滤波处理得到原发性神经信号;
4、s2:构建原发性神经信号特征提取模型对原发性神经信号进行特征提取,得到神经信号特征,所述原发性神经信号特征提取模型以原发性神经信号为输入,以空间感知的神经信号特征为输出;
5、s3:构建康复步态校正模型,利用康复步态校正模型生成膝盖护理校正参数,所述模型以神经信号特征以及对应的步态姿势参数为输入,以膝盖护理校正参数为输出;
6、s4:根据所生成的膝盖护理校正参数,对患者步行过程中的腿部膝盖姿势进行实时校正。
7、作为本发明的进一步改进方法:
8、可选地,所述s1步骤中采集患者腿部神经信号以及对应的步态姿势参数,包括:
9、在患者腿部放置电极片,并引导患者完成指定的步态姿势,得到患者腿部神经信号以及对应的步态姿势参数,所述患者腿部神经信号以及对应步态姿势参数的表示形式为:
10、{(xn(tn),ln)|n∈[1,n]}
11、其中:
12、xn(tn)表示所采集患者的第n段腿部神经信号,tn表示时序信息,tn∈[tn(0),tn(sn)],tn(0)表示采集患者第n段腿部神经信号的初始时刻,tn(sn)表示采集患者第n段腿部神经信号的截止时刻;
13、n表示所采集的患者腿部神经信号总数;
14、ln表示腿部神经信号xn(tn)对应的步态姿势参数,ln∈l,其中l表示步态姿势参数集合。在本发明实施例中,步态姿势参数集合中包括膝盖的弯曲幅度以及弯曲速度参数。
15、可选地,所述s1步骤中对采集的患者腿部神经信号进行滤波处理得到原发性神经信号,包括:
16、对采集的患者腿部神经信号进行滤波处理得到原发性神经信号,其中患者腿部神经信号xn(tn)的滤波处理流程为:
17、s11:构建用于滤波处理的小波函数:
18、
19、
20、其中:
21、ψ(t)表示用于滤波处理的父小波函数,t表示函数输入值;
22、表示用于滤波处理的母小波函数;
23、s12:构建用于滤波处理的滤波器:
24、
25、
26、其中:
27、h0(ft)表示低通滤波器,ft表示输入的信号频率值,表示低通滤波限制频率;
28、h1(ft)表示高通滤波器,表示高通滤波限制频率;
29、s13:基于小波函数以及用于滤波处理的滤波器,对患者腿部神经信号xn(tn)进行滤波分解处理:
30、
31、
32、其中:
33、表示对xn(tn(j))进行滤波分解得到的滤波分解尺度k下的近似系数值,xn(tn(j))表示腿部神经信号xn(tn)在采集时刻tn(j)的信号值,tn(j)∈[tn(0),tn(sn)],j∈[0,sn],k∈[1,k],对应k个滤波分解尺度;
34、表示对xn(tn(j))进行滤波分解得到的尺度k下的细节系数值;
35、mod表示取模符号;
36、在本发明实施例中,
37、构成腿部神经信号xn(tn)在k个滤波分解尺度的滤波分解结果:
38、
39、
40、其中:
41、表示腿部神经信号xn(tn)在滤波分解尺度k下的近似系数;
42、表示腿部神经信号xn(tn)在滤波分解尺度k下的细节系数;
43、在本发明实施例中,信号的能量大多集中在近似系数中,噪声大多集中在细节系数中,因此只对近似系数进行多尺度分解,将噪声信息剔除;
44、将k个滤波分解尺度下的近似系数以及细节系数作为腿部神经信号xn(tn)的原发性神经信号。
45、可选地,所述s2步骤中构建原发性神经信号特征提取模型对原发性神经信号进行特征提取,包括:
46、构建原发性神经信号特征提取模型,所述原发性神经信号特征提取模型以原发性神经信号为输入,以空间感知的神经信号特征为输出,其中原发性神经信号特征提取模型包括输入层、伪迹去除层以及特征提取层,输入层用于接收原发性神经信号,伪迹去除层用于对原发性神经信号中膝盖活动外其他生理动作所产生的伪迹信号进行去除,特征提取层用于对伪迹去除后的原发性神经信号进行特征提取处理;
47、利用原发性神经信号特征提取模型对原发性神经信号进行特征提取处理,其中腿部神经信号xn(tn)所对应原发性神经信号的特征提取处理流程为:
48、s21:输入层接收腿部神经信号xn(tn)的k个滤波分解尺度下的近似系数以及细节系数,并提取近似系数,构成近似系数的协方差矩阵,其中近似系数的协方差矩阵形式为:
49、
50、其中:
51、t表示转置;
52、trace(·)表示计算矩阵的迹;
53、表示近似系数的协方差矩阵;
54、将所构成的k个滤波分解尺度下的协方差矩阵发送到伪迹去除层;
55、s22:伪迹去除层对协方差矩阵进行特征分解处理,其中每个协方差矩阵分解得到e个特征值以及对应的特征向量,将e个特征值构成对角矩阵,e个特征向量构成特征向量矩阵;
56、s23:初始化k个近似系数的主成分向量,每个主成分向量中包含m组主成分特征提取向量,其中所对应的主成分向量初始化形式为:
57、
58、其中:
59、表示所对应的主成分向量初始化形式,表示主成分向量中第m组主成分特征提取向量初始化形式,m∈[1,m];
60、在本发明实施例中,||·||为l1范数;
61、s24:设置主成分向量的当前迭代次数为e,e的初始值为0,则所对应主成分向量的第e次迭代结果为主成分向量中第m组主成分特征提取向量为
62、s25:对主成分向量中的每组主成分特征提取向量进行迭代更新,若小于预设的阈值,则将作为的最终迭代得到的第m组主成分特征提取向量并对其他组主成分特征提取向量进行迭代更新,否则对进行迭代:
63、
64、其中:
65、||·||为l1范数;
66、ak表示对协方差矩阵进行特征分解得到的特征向量矩阵,∑k表示对协方差矩阵进行特征分解得到的对角矩阵;
67、令e=e+1,返回步骤s25;
68、s26:根据迭代更新得到的主成分特征提取向量,生成腿部神经信号xn(tn)的主成分近似系数rk(n):
69、
70、其中:
71、rk(n)表示去除伪迹信号的滤波分解尺度k下的主成分近似系数;
72、s27:特征提取层对k个主成分近似系数进行卷积特征提取处理,得到腿部神经信号xn(tn)的神经信号特征fn。
73、可选地,所述s27步骤中对k个主成分近似系数进行卷积特征提取处理,包括:
74、s271:生成主成分近似系数rk(n)的卷积特征ck(n):
75、ck(n)=σ(w1rk(n)+b1)
76、其中:
77、σ(·)表示激活函数;在本发明实施例中,所选取激活函数为relu激活函数;
78、w1表示卷积计算过程中的权重参数,b1表示卷积计算过程中的偏置参数;
79、s272:生成滤波分解尺度1至k-1下的空间感知信息:
80、
81、其中:
82、exp(·)表示以自然常数为底的指数函数;
83、softmax(·)为softmax函数;
84、w2表示空间感知信息计算过程中的权重参数;
85、s273:结合空间感知信息对卷积特征ck(n)进行空间感知融合处理:
86、fk(n)=σ(w3[ck(n),fk-1(n)]+b3)tanh(gk-1(n))
87、其中:
88、w3表示空间感知信息融合过程中的权重参数,b3表示空间感知信息融合过程中的偏置参数;
89、fk(n)表示主成分近似系数rk(n)的融合空间感知信息的卷积特征提取结果;
90、在本发明实施例中,f0(n)=0;
91、s274:令k=k+1,返回步骤s271,直到k=k,将fk(n)作为腿部神经信号xn(tn)的神经信号特征fn。
92、可选地,所述s3步骤中构建康复步态校正模型,包括:
93、构建康复步态校正模型,所述康复步态校正模型以神经信号特征以及对应的步态姿势参数为输入,以膝盖护理校正参数为输出,其中康复步态校正模型包括输入层、校正参数映射层以及输出层,输入层用于接收n段腿部神经信号的神经信号特征以及对应的步态姿势参数,校正参数映射层用于将神经信号特征映射为校正参数,输出层将校正参数以及步态姿势参数进行对应组合,构成膝盖护理校正参数进行输出。
94、可选地,所述s3步骤中利用康复步态校正模型生成膝盖护理校正参数,包括:
95、利用康复步态校正模型生成膝盖护理校正参数,其中膝盖护理校正参数的生成流程为:
96、s31:输入层用于接收n段腿部神经信号的神经信号特征以及对应的步态姿势参数,其中所接收神经信号特征以及步态姿势参数集合为:
97、{(fn,ln)|n∈[1,n]}
98、其中:
99、(fn,ln)表示第n段腿部神经信号的神经信号特征以及对应的步态姿势参数;
100、s32:计算得到神经信号特征fn对应的参数调整步长λn:
101、
102、其中:
103、mean(fn)表示神经信号特征fn的均值;
104、std(fn)表示神经信号特征fn的标准差;
105、w表示特征映射矩阵;
106、s33:基于参数调整步长λn生成步态姿势参数ln对应的校正参数:
107、gn=ln-λn
108、其中:
109、gn为步态姿势参数ln对应的校正参数;
110、s34:构成膝盖护理校正参数:{(gn,ln)|n∈[1,n]}。
111、可选地,所述s4步骤中根据膝盖护理校正参数,对患者步行过程中的腿部膝盖姿势进行实时校正,包括:
112、根据膝盖护理校正参数,对患者步行过程中的腿部膝盖姿势进行实时监测,其中腿部膝盖姿势包括膝盖的弯曲幅度以及弯曲速度,将监测结果作为步态姿势参数对膝盖护理校正参数进行遍历,遍历得到对应的校正参数,其中校正参数为校正后的膝盖弯曲幅度以及弯曲速度,根据校正参数提醒患者调整膝盖弯曲幅度以及弯曲速度。
113、为了解决上述问题,另一方面,本发明提供一种微感反馈的智能膝盖康复护理装置,其特征在于,所述装置包括:
114、微感信号采集装置,用于采集患者腿部神经信号以及对应的步态姿势参数,并对采集的患者腿部神经信号进行滤波处理得到原发性神经信号;
115、信号特征提取模块,用于构建原发性神经信号特征提取模型对原发性神经信号进行特征提取,得到神经信号特征;
116、膝盖护理校正装置,用于构建康复步态校正模型,利用康复步态校正模型生成膝盖护理校正参数,对患者步行过程中的腿部膝盖姿势进行实时校正。
117、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
118、存储器,存储至少一个指令;
119、通信接口,实现电子设备通信;及
120、处理器,执行所述存储器中存储的指令以实现上述所述的微感反馈的智能膝盖康复护理方法。
121、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的微感反馈的智能膝盖康复护理方法。
122、相对于现有技术,本发明提出一种微感反馈的智能膝盖康复护理方法,该技术具有以下优势:
123、首先,本方案提出一种腿部神经信号特征提取方法,对采集的患者腿部神经信号进行滤波处理得到原发性神经信号,其中患者腿部神经信号xn(tn)的滤波处理流程为:构建用于滤波处理的小波函数:
124、
125、
126、其中:ψ(t)表示用于滤波处理的父小波函数,t表示函数输入值;表示用于滤波处理的母小波函数;构建用于滤波处理的滤波器:
127、
128、
129、其中:h0(ft)表示低通滤波器,ft表示输入的信号频率值,表示低通滤波限制频率;h1(ft)表示高通滤波器,表示高通滤波限制频率;基于小波函数以及用于滤波处理的滤波器,对患者腿部神经信号xn(tn)进行滤波分解处理:
130、
131、
132、其中:表示对xn(tn(j))进行滤波分解得到的滤波分解尺度k下的近似系数值,xn(tn(j))表示腿部神经信号xn(tn)在采集时刻tn(j)的信号值,tn(j)∈[tn(0),tn(sn)],j∈[0,sn],k∈[1,k],对应k个滤波分解尺度;表示对xn(tn(j))进行滤波分解得到的尺度k下的细节系数值;mod表示取模符号;构成腿部神经信号xn(tn)在k个滤波分解尺度的滤波分解结果:
133、
134、
135、其中:表示腿部神经信号xn(tn)在滤波分解尺度k下的近似系数;表示腿部神经信号xn(tn)在滤波分解尺度k下的细节系数;将k个滤波分解尺度下的近似系数以及细节系数作为腿部神经信号xn(tn)的原发性神经信号。构建原发性神经信号特征提取模型,所述原发性神经信号特征提取模型以原发性神经信号为输入,以空间感知的神经信号特征为输出,其中原发性神经信号特征提取模型包括输入层、伪迹去除层以及特征提取层,输入层用于接收原发性神经信号,伪迹去除层用于对原发性神经信号中膝盖活动外其他生理动作所产生的伪迹信号进行去除,特征提取层用于对伪迹去除后的原发性神经信号进行特征提取处理。本方案通过构建小波函数、滤波器对所采集的腿部神经信号进行滤波分解处理,得到多尺度的近似系数以及细节系数,利用原发性神经信号特征提取模型对包含更多能量信息的近似系数进行特征提取处理,首先利用伪迹去除层对原发性神经信号进行主成分提取处理,过滤原发性神经信号中可能存在的伪迹信号,保证提取处理后的信号为纯净的腿部神经信号,进而采用提取多尺度近似系数卷积特征空间感知信息的方式,进行多尺度的卷积特征以及空间感知信息的融合处理,得到空间感知的神经信号特征,有利于表征腿部神经信号异常。
136、同时,本方案提出一种膝盖校正参数生成方法,通过构建康复步态校正模型,所述康复步态校正模型以神经信号特征以及对应的步态姿势参数为输入,以膝盖护理校正参数为输出,利用康复步态校正模型生成膝盖护理校正参数,其中膝盖护理校正参数的生成流程为:输入层用于接收n段腿部神经信号的神经信号特征以及对应的步态姿势参数,其中所接收神经信号特征以及步态姿势参数集合为:
137、{(fn,ln)|n∈[1,n]}
138、其中:(fn,ln)表示第n段腿部神经信号的神经信号特征以及对应的步态姿势参数;计算得到神经信号特征fn对应的参数调整步长λn:
139、
140、其中:mean(fn)表示神经信号特征fn的均值;std(fn)表示神经信号特征fn的标准差;w表示特征映射矩阵;基于参数调整步长λn生成步态姿势参数ln对应的校正参数:
141、gn=ln-λn
142、其中:gn为步态姿势参数ln对应的校正参数;构成膝盖护理校正参数:{(gn,ln)|n∈[1,n]}。本方案利用康复步态校正模型对神经信号特征进行映射,生成膝盖护理校正参数,其中腿部神经信号的异常程度越大,对应的神经信号特征分布就越异常,根据神经信号特征分布的异常性,在患者步态姿势参数的基础上进行校正参数生成,进而对患者步行过程中的腿部膝盖姿势进行实时监测,将监测结果作为步态姿势参数对膝盖护理校正参数进行遍历,遍历得到对应的校正参数,根据校正参数提醒患者调整膝盖弯曲幅度以及弯曲速度,实现基于患者腿部神经微感反馈的膝盖动作康复校正护理。
- 还没有人留言评论。精彩留言会获得点赞!