一种基于关节解耦策略的腕肘协同柔性康复机器人
本发明涉及机器人,尤其是指一种基于关节解耦策略的腕肘协同柔性康复机器人。
背景技术:
1、脑卒中又称脑血管意外,是急性脑血管病引起的局部脑功能障碍,是全球第二大死亡原因和第三大致残原因,具有发病率高,死亡率高,致残率高,复发率高等特点,且上肢功能障碍是脑卒中的常见问题,因此,有效的康复治疗方法是改善偏瘫上肢运动功能障碍的有效途径。
2、以往主要的康复方法为治疗医师人工辅助训练,但这种方法极大地占用了医护资源,随着智能机器人技术的发展,外骨骼机器人辅助康复技术逐渐代替人工辅助康复,缓解了医护资源压力。随着康复需求的不断提高,传统的刚性外骨骼康复机器人不足以胜任康复工作,具有柔顺性差的缺点,易于造成二次伤害。近年来,柔性外骨骼康复机器人的提出,解决了这一问题,它具有高柔顺性,且便于携带。柔性上肢外骨骼康复机器人是一种将机器人学、人体工程学、信息学、流体力学、控制学、医疗康复学等多个学科有机地融合为一体,能够实现上肢部分功能代偿的柔性康复机器人。
3、但是,目前现有的柔性上肢外骨骼康复机器人总体上呈现两个问题:
4、第一个问题:是对于腕关节内旋/外旋康复动作的实现的设备较少,难以适应多样化的康复对象与康复需求;
5、第二个问题:是现有的柔性上肢外骨骼康复机器人虽部分采用了气动肌肉,绳索等柔性驱动、传动方式,但是与上肢接触的大多为刚性结构,同刚性外骨骼机器人一样,仍然可能会对患者上肢造成二次伤害,柔顺性较差。此外,大多数上肢外骨骼康复机器人没有充分考虑机器人与人体上肢的贴合特性,不能够有效提高患者穿戴时的舒适性以及在康复时的柔顺性,导致难以较好的实现康复动作。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中柔性上肢外骨骼机器人对于腕关节内旋/外旋康复动作的实现的设备较少,且虽部分采用了气动肌肉,绳索等柔性驱动、传动方式,但是与上肢接触的大多为刚性结构等难点。
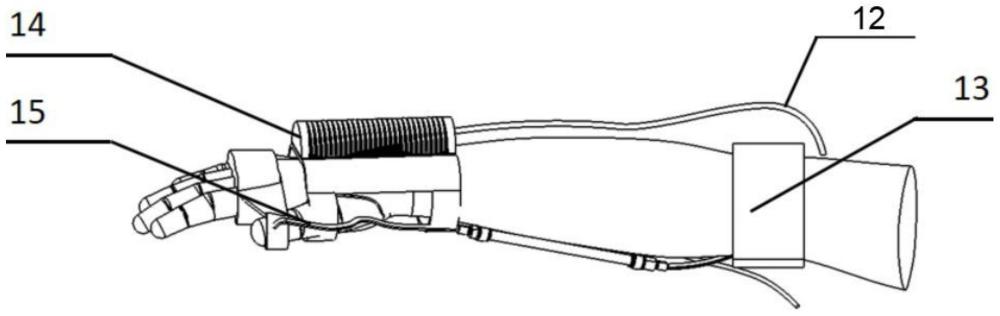
2、为解决上述技术问题,本发明提供了一种基于关节解耦策略的腕肘协同柔性康复机器人,包括:包括手指限位绑带、肘部柔性驱动器、气体输送管、肘部紧束结构、腕部柔性驱动器、模块连接件a、模块连接件b及腕部柔性驱动器固定套;其中,所述肘部柔性驱动器和所述腕部柔性驱动器均为气动软体驱动器,所述手指限位绑带、肘部紧束结构、模块连接件a和模块连接件b均为柔性材料,并且所述手指限位绑带、肘部紧束结构、模块连接件a和模块连接件b贴附在人体表面。本发明基于关节解耦策略的腕肘协同柔性康复机器人,结构巧妙合理,通过腕关节驱动器与肘关节驱动器的协作,创新性地实现了柔性康复机器人对人体上肢肘关节的旋内/旋外运动,实现了腕肘协同训练的康复动作,同时提高了上肢外骨骼康复机器人对康复需求的适应性,改善了穿戴的舒适性与动作柔顺性,最终实现腕肘关节灵活柔顺安全的康复运动,以适应多样化的康复需求,提高患者的穿戴舒适性,康复动作的柔顺性,安全高效地完成康复动作。
3、在本发明的一个实施例中,所述模块连接件a和模块连接件b均起连接作用,所述肘部柔性驱动器的一端与所述手指限位绑带的大拇指端绑带部分通过模块连接件连a连接,并且所述肘部柔性驱动器的另一端与模块连接件b连接,所述手指限位绑带与所述模块连接件a连接,所述肘部紧束结构与模块连接件b连接,所述腕部柔性驱动器固定套套设在人体手腕上,所述气体输送管设置为两根,并且两根气体输送管分别连接在所述肘部柔性驱动器上和所述腕部柔性驱动器上。
4、在本发明的一个实施例中,所述腕部柔性驱动器包括柔性半圆柱气腔、缠绕纤维、单侧限位层以及柔性底层。
5、在本发明的一个实施例中,所述柔性半圆柱气腔整体呈半圆柱状,并且柔性半圆柱气腔采用硅弹性体制成,所述柔性半圆柱气腔的一端留有气动接口一,所述气动接口一为所述气体输送管的接口。
6、在本发明的一个实施例中,所述缠绕纤维为凯夫拉斯纤维,并且缠绕纤维双向缠绕在所述柔性半圆柱气腔的外部。
7、在本发明的一个实施例中,所述单侧限位层为尼龙柔性材料,并且单侧限位层贴合在所述柔性半圆柱气腔与所述柔性底层之间。
8、在本发明的一个实施例中,所述柔性底层为与所述柔性半圆柱气腔相同的硅胶材料,并且柔性底层呈长方体状。
9、在本发明的一个实施例中,所述肘部柔性驱动器包括锁紧机构、气动接口二以及纤维约束气腔,所述气动接口二为所述气体输送管的接口,所述纤维约束气腔为由mckibben肌肉外套编织管的柔性气腔,所述锁紧机构为锁紧所述气动接口二与所述纤维约束气腔的螺栓锁紧机构。
10、在本发明的一个实施例中,所述肘部紧束结构与所述腕部柔性驱动器固定套均采用魔术带。
11、在本发明的一个实施例中,所述康复机器人还包括贴合力感知系统和关节转角与整体姿态感知系统,所述贴合力感知系统包括多个薄膜压力传感器和多个拉力传感器,所述关节转角与整体姿态感知系统包括多个弯曲传感器和六轴姿态传感器。
12、本发明的上述技术方案相比现有技术具有以下优点:
13、1)本发明公开的基于关节解耦策略的腕肘协同柔性康复机器人结构巧妙合理,针对现有技术少有地实现肘关节内旋/外旋康复动作,本发明通过腕关节驱动器与肘关节驱动器的协作,创新性地实现了柔性康复机器人对人体上肢肘关节的旋内/旋外运动,实现了腕肘协同训练的康复动作,提高上肢外骨骼康复机器人对不同康复对象与康复需求的适应性;
14、2)本发明公开的基于关节解耦策略的腕肘协同柔性康复机器人针对现有上肢外骨骼康复机器人虽部分采用了气动肌肉,绳索等柔性驱动、传动方式,但是与上肢接触的大多为刚性结构,同刚性外骨骼机器人一样,仍然可能会对患者上肢造成二次伤害,柔顺性较差的问题,采取全柔性部件,贴合人体,改善穿戴舒适性与动作柔顺性,实现灵活柔顺安全康复任务。
技术特征:
1.一种基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于,包括:包括手指限位绑带、肘部柔性驱动器、气体输送管、肘部紧束结构、腕部柔性驱动器、模块连接件a、模块连接件b及腕部柔性驱动器固定套;
2.根据权利要求1所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述模块连接件a和模块连接件b均起连接作用,所述肘部柔性驱动器的一端与所述手指限位绑带的大拇指端绑带部分通过模块连接件连a连接,并且所述肘部柔性驱动器的另一端与模块连接件b连接,所述手指限位绑带与所述模块连接件a连接,所述肘部紧束结构与模块连接件b连接,所述腕部柔性驱动器固定套套设在人体手腕上,所述气体输送管设置为两根,并且两根气体输送管分别连接在所述肘部柔性驱动器上和所述腕部柔性驱动器上。
3.根据权利要求1所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述腕部柔性驱动器包括柔性半圆柱气腔、缠绕纤维、单侧限位层以及柔性底层。
4.根据权利要求3所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述柔性半圆柱气腔整体呈半圆柱状,并且柔性半圆柱气腔采用硅弹性体制成,所述柔性半圆柱气腔的一端留有气动接口一,所述气动接口一为所述气体输送管的接口。
5.根据权利要求3所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述缠绕纤维为凯夫拉斯纤维,并且缠绕纤维双向缠绕在所述柔性半圆柱气腔的外部。
6.根据权利要求3所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述单侧限位层为尼龙柔性材料,并且单侧限位层贴合在所述柔性半圆柱气腔与所述柔性底层之间。
7.根据权利要求3所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述柔性底层为与所述柔性半圆柱气腔相同的硅胶材料,并且柔性底层呈长方体状。
8.根据权利要求1所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述肘部柔性驱动器包括锁紧机构、气动接口二以及纤维约束气腔,所述气动接口二为所述气体输送管的接口,所述纤维约束气腔为由mckibben肌肉外套编织管的柔性气腔,所述锁紧机构为锁紧所述气动接口二与所述纤维约束气腔的螺栓锁紧机构。
9.根据权利要求1所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述肘部紧束结构与所述腕部柔性驱动器固定套均采用魔术带。
10.根据权利要求1所述的基于关节解耦策略的腕肘协同柔性康复机器人,其特征在于:所述康复机器人还包括贴合力感知系统和关节转角与整体姿态感知系统,所述贴合力感知系统包括多个薄膜压力传感器和多个拉力传感器,所述关节转角与整体姿态感知系统包括多个弯曲传感器和六轴姿态传感器。
技术总结
本发明涉及一种基于关节解耦策略的腕肘协同柔性康复机器人,包括手指限位绑带,肘部柔性驱动器,气体传输结构,肘部紧束结构,腕部柔性驱动器,腕部柔性驱动器固定套,模块连接件A以及模块连接件B,所述肘部柔性驱动器和所述腕部柔性驱动器均为气动软体驱动器,每一者的连接件都为柔性材料。本发明的基于关节解耦策略的腕肘协同柔性康复机器人,结构巧妙合理,通过腕关节驱动器与肘关节驱动器的协作,创新性地实现了柔性康复机器人对人体上肢肘关节的旋内/旋外运动,实现了腕肘协同训练的康复动作,同时提高了上肢外骨骼康复机器人对康复需求的适应性,改善了穿戴的舒适性与动作柔顺性,最终实现腕肘关节灵活柔顺安全的康复运动。
技术研发人员:郑坤明,顾文俊,张秋菊
受保护的技术使用者:江南大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!