一种应用于核磁共振环境下的串并联结合软轴驱动长臂穿刺机器人及使用方法
本发明专利涉及医疗机器人,具体涉及一种应用于核磁共振环境下的串并联结合软轴驱动长臂穿刺机器人。
背景技术:
1、在手术过程中医生需要长时间专注于手术过程,时常能见到医生因连续多台手术等情况在手术后晕倒等情况发生。精准的穿刺手术治疗对患者和医生都是一项重大的挑战,医生在手术过程中可能会因为生理性颤抖或长时间工作导致的疲劳等因素的干扰而对穿刺精度造成影响。然而随着科学技术的逐渐发展,医疗技术也在稳固提升,穿刺机器人在临床医疗上发挥着至关重要的作用。穿刺机器人则不会受限于上述因素,它可以长时间稳定的工作,而且精准度亦有一定的保障,因此在穿刺手术中引入穿刺机器人是十分有必要的。穿刺机器人需要考虑具体的应用场景,在核磁共振环境下受限于核磁共振仪内部空间狭小,机器人应用材料是否为核磁兼容材料等问题,大部分穿刺机器人无法适应该环境。在核磁共振环境中对患者进行医疗手术可以提高手术的成功率。因此机器人在核磁环境下工作是一个必须要解决的问题。穿刺机器人在核磁共振环境下依然要保证其所需要保持的精准度以及在正常环境下所具有的功能。
技术实现思路
1、本发明提供一种应用于核磁共振环境下的串并联结合软轴驱动长臂穿刺机器人以解决上述背景技术中存在的问题。
2、为解决上述技术问题本发明所采用的技术方案是:
3、一种应用于核磁共振环境下的串并联结合软轴驱动长臂穿刺机器人,该机器人由抗磁性材料组成,在核磁环境下仅有机器手臂、滑台导轨、针体伸入核磁共振仪器中对患者进行穿刺手术,其余部分留在核磁共振仪器外部。包括:位姿调整机构与针体机构,位姿调整机构包括:偏摆位姿调整、俯仰位姿调整、x轴方向移动、y轴方向移动、z轴方向移动;所述的偏摆位姿调整用来调整进针时候的偏摆角度,所述的俯仰位姿调整用于调整进针时候的俯仰角度,所述x轴方向移动用来控制穿刺过程中的x轴向的穿刺针与穿刺靶点处之间的x轴向距离,所述y轴方向移动用来控制穿刺过程中的y轴向的穿刺针与穿刺靶点处之间的y轴向距离,所述z轴方向移动用来控制穿刺过程中的z轴向的穿刺针与穿刺靶点处之间的z轴向距离。
4、偏摆位姿调整机构包括:动力提供装置、偏摆装置,动力提供装置为偏摆装置提供动力。
5、进一步,动力提供装置包括:驱动电机、联轴器、软轴、丝杠、丝杠固定件,动力提供装置通过电动机传递动力经由软轴传递给丝杠,带动丝杠旋转。
6、进一步,偏摆装置包括:滑台导轨、针体连接器、机器手臂。
7、进一步,滑台导轨分为导轨和滑块两部分组成,当为两导轨滑台所提供动力的动力提供装置中的两个电机传动速度、方向不全相同时,丝杠旋转使滑台导轨上的滑块产生了位移,两滑块沿导轨方向移动不同步,针体连接器转动进而调整穿刺针的偏摆角度大小。
8、俯仰位姿调整机构包括:动力提供装置、偏摆装置,动力提供装置为俯仰装置提供动力。
9、进一步,俯仰装置包括:滑台导轨、针体连接器、机器手臂。
10、进一步,滑台导轨分为导轨和滑块两部分组成,当为两导轨滑台提供动力的动力提供装置中的两个电机传动速度、方向不全相同时,丝杠旋转使滑台导轨上的滑块产生了位移,两滑块沿导轨方向移动不同步,上端针体连接器通过螺栓固定的针体转动,针体上的凸起点在下端针体连接器凹槽处滑动进而调整穿刺针的俯仰角度大小。
11、x轴方向移动机构包括:动力提供装置、x轴方向运动装置,动力提供装置为x轴方向运动装置提供动力。
12、进一步,x轴方向运动装置包括:滑台导轨、针体连接器、机器手臂。
13、进一步,滑台导轨分为导轨和滑块两部分组成,当为两导轨滑台提供动力的动力提供装置中的两个电机传动速度与方向皆相同时,丝杠旋转使滑台导轨上的滑块产生了位移,两滑块运动同步,针体转接器无旋转发生,针体沿x轴方向运动。
14、y轴方向移动机构包括:动力提供装置、y轴方向运动装置,动力提供装置为y轴方向运动装置提供动力。
15、进一步,y轴方向运动装置包括:滑台导轨、针体连接器、机器手臂。
16、进一步,滑台导轨分为导轨和滑块两部分组成,当为两导轨滑台提供动力的动力提供装置中的两个电机传动速度、方向完全相同时,丝杠旋转使滑台导轨上的滑块产生了位移,两滑块沿导轨方向移动同步,滑块带动机器手臂沿y轴移动,针体连接器上端与针体不发生转动,针体连接器下端凹槽与针体凸起处没有位移,针体沿y轴方向运动。
17、z轴方向移动机构包括:动力提供装置、z轴方向运动装置,动力提供装置为z轴方向运动装置提供动力。
18、进一步,z轴方向运动装置包括:滑台导轨、针体连接器、机器手臂。
19、进一步,当两驱动电机驱动方向速度相同时,丝杠旋转使滑台导轨上的滑块产生了位移,滑块同步运动,使整个位姿调整机构沿z轴运动。
20、针体机构包括:穿刺针、进退针机构,穿刺针经过位姿调整机构调整至目标靶点处,由进、退针机构推动穿刺针进针刺入目标靶点。
21、进一步,进、退针机构包括:进退针动力提供装置、穿刺针移动装置,进退针动力提供装置为穿刺针移动装置提供动力,使得穿刺针按照既定路线对目标靶点进行穿刺。
22、进一步,进退针动力提供装置包括:驱动电机、联轴器、软轴、丝杠、丝杠固定件,进退针动力提供装置通过电动机传递动力经由软轴传递给丝杠,带动丝杠旋转。
23、进一步,穿刺针移动装置包括:滑台导轨、穿刺针、穿刺针固定件,在动力提供装置提供的动力之下,滑台导轨上的滑块移动,带动穿刺针的移动,使得穿刺针朝着目标靶点实现进针及退针等运动。
24、使用方法:患者位于核磁共振仪器内部,通过核磁共振成像得到患者的病灶位置靶点,机器人根据患者病灶位置靶点规划穿刺路径并完成穿刺。具体如下:机器人分别通过z轴方向移动机构、x轴方向移动机构、y轴方向移动机构调整穿刺针与靶点位置,通过调整穿刺针体的偏摆及俯仰优化进针角度并选取最优的穿刺路径,待穿刺路径规划完毕后,通过针体机构完成进针穿刺,待穿刺结束后,退针至安全位置,机器人回归至初始位置。
25、本发明具有以下有益效果:
26、(1)本发明仅将机器手臂及针体机构伸入核磁共振仪器中,在核磁共振仪器有限的狭小空间下减小穿刺机器人的空间占有率。
27、(2)本发明所采用的材料全部为抗磁性材料不会对核磁共振检测产生干扰,采取电机与软轴结合的驱动方式,避免了电机驱动对核磁环境的干扰,使用电机驱动相较于气动、液压传动等传动方式精确度较高。
28、(3)采取串并联结合的方式使结构更加紧凑
29、(4)可实现x、y、z轴的移动,大角度的偏摆及俯仰,自由、灵活、精准的进、退针,使穿刺路径得到进一步的优化。
技术特征:
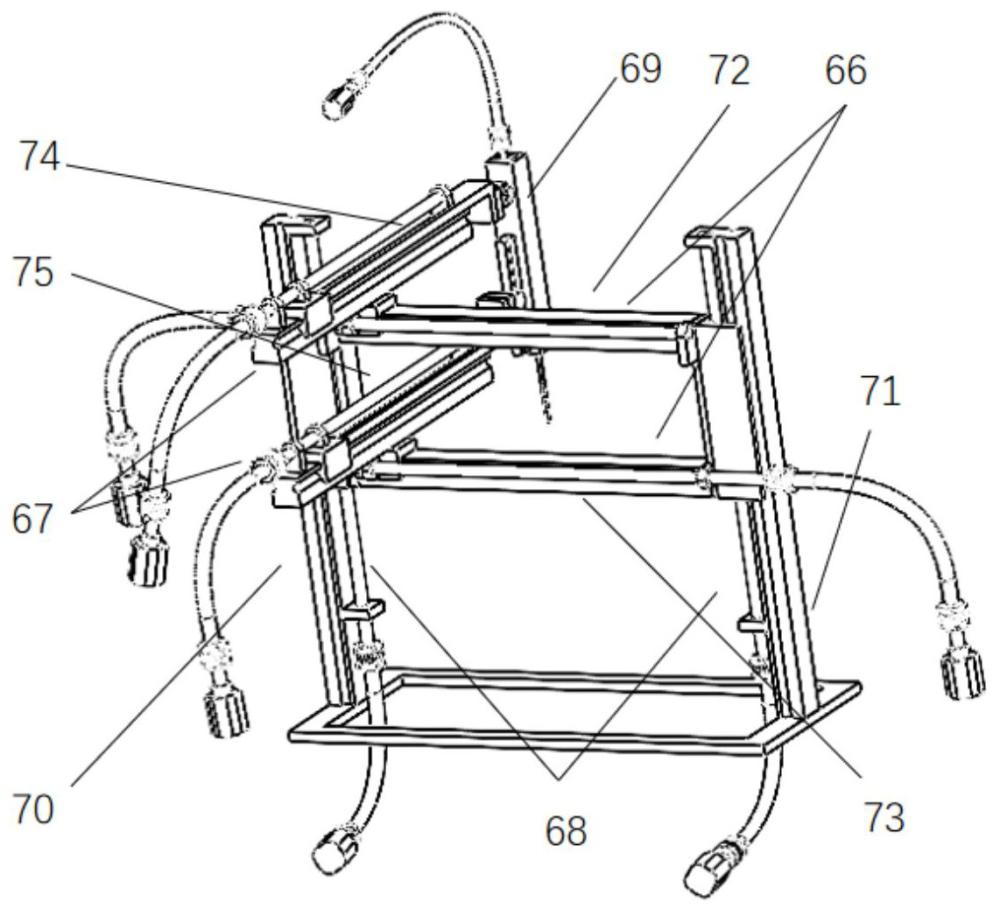
1.一种应用于核磁共振环境下的串并联结合软轴驱动长臂穿刺机器人,其特征在于:(39)底座,(66)x轴方向位姿调整机构,(67)y轴方向位姿调整机构,(68)z轴方向运动机构,(69)针体机构。
2.根据权利要求1所述的(68)z轴方向运动机构,其特征在于:(70)第一传动机构与(71)第二传动机构与(39)底座相连接。
3.根据权利要求2所述(70)第一传动机构,其特征在于:(52)第一驱动电机与(45)第一软轴通过(59)第八联轴器相连接,(45)第一软轴与(31)第一丝杠通过(34)第一联轴器相连接,(31)第一丝杠固定在(35)第一丝杠固定件上,(35)第一丝杠固定件与(37)第一导轨相连接,(31)第一丝杠穿过(29)第一滑块上的螺纹孔。(71)第二传动机构,其特征在于:(53)第二驱动电机与(46)第二软轴通过(60)第九联轴器相连接,(46)第二软轴与(32)第二丝杠通过(33)第二联轴器相连接,(32)第二丝杠固定在(36)第二丝杠固定件上,(36)第二丝杠固定件与(38)第二导轨相连接,(32)第二丝杠穿过(30)第二滑块上的螺纹孔。
4.根据权利要求1所述的x轴方向位姿调整机构,其特征在于:(72)第三传动机构和(73)第四传动机构与(23)第三丝杠固定件和(24)第四丝杠固定件相连接。
5.根据权利要求4所述(72)第三传动机构其特征在于:(54)第三驱动电机与(47)第三软轴通过(61)第十联轴器相连接,(47)第三软轴与(21)第三丝杠通过(19)第三联轴器相连接,(21)第三丝杠固定在(23)第三丝杠固定件上与(24)第四丝杠固定件上,(23)第三丝杠固定件固定在(29)第一滑块上,(21)第三丝杠穿过(27)第三滑块上的螺纹孔。(73)第四传动机构其特征在于:(55)第四驱动电机与(48)第四软轴通过(62)第十一联轴器相连接,(48)第四软轴与(22)第四丝杠通过(20)第四联轴器相连接,(22)第四丝杠固定在(23)第三丝杠固定件与(24)第四丝杠固定件上,(24)第四丝杠固定件与(29)第一滑块相连接,(23)第四丝杠穿过(28)第四滑块上的螺纹孔。
6.根据权利要求1所述的(67)y轴方向位姿调整机构,其特征在于:(74)第五传动机构与(72)第三传动机构相连接,(75)第六传动机构与(73)第四传动机构相连接。
7.根据权利要求6所述(74)第五传动机构其特征在于:(56)第五驱动电机与(49)第五软轴通过(63)第十二联轴器相连接,(49)第五软轴与(4)第五丝杠通过(1)第五联轴器相连接,(4)第五丝杠固定在(5)第五丝杠固定件上,(5)第五丝杠固定件固定在(7)第五滑块上,(4)第五丝杠穿过(7)第五滑块上的螺纹孔,(9)第一机器手臂与(7)第五滑块相连接,(11)第一针体连接器与(9)第一机器手臂相连接,(16)针体与(11)第一针体转接器相连接。(75)第六传动机构其特征在于:(57)第六驱动电机与(50)第六软轴通过(64)第十三联轴器相连接,(50)第六软轴与(3)第六丝杠通过(2)第六联轴器相连接,(3)第六丝杠固定在(6)第六丝杠固定件上,(6)第六丝杠固定件与(8)第六滑块相连接,(3)第六丝杠穿过(8)第六滑块上的螺纹孔,(10)第二机器手臂与(8)第六滑块相连接,(12)第二针体连接器上的凸起在(16)针体上的滑槽滑动。
8.根据权利要求1所述(69)针体机构,其特征在于:(16)针体内部设有滑道,(42)第七丝杠固定件固定于针体外壳内部,(15)第七丝杠固定于(42)第七丝杠固定件上,(44)穿刺针与(40)穿刺针连接滑块相连接,(40)穿刺针滑块在(41)针体内部滑台上滑动,(15)第七丝杠穿过(40)穿刺针连接滑块上的螺纹孔。
技术总结
本发明是一种应用于核磁共振环境下的串并联结合软轴驱动长臂穿刺机器人,本发明包括:位姿调整模块、穿刺模块。本发明的主要目的是为了实现在核磁共振环境下高精度、短时间以及高安全性的精准穿刺手术。该机器人主要设计一长机械臂伸入核磁共振仪器当中对患者进行穿刺手术,采取了串并联结合的方式使结构更加紧凑,减小了穿刺机器人在核磁共振空间的占有率,该机器人可以实现穿刺针在X、Y、Z方向的移动,实现穿刺针的俯仰、偏摆,可以调节穿刺针穿刺的角度及位置。该机构结构简单,灵活性高,不仅能够减少穿刺手术的时间和提高穿刺手术的精度,还可以达到传统穿刺手术达不到某些病灶点,更为其他穿刺手术机器人提供了一个参考。
技术研发人员:张为玺,牛聪,门智慧,朱欣瑞
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!