六维治疗床及其运动控制方法与流程
本发明涉及医疗器械,特别是一种六维治疗床及其运动控制方法。
背景技术:
1、随着放疗技术的发展,尤其是近年来flash效应的发现,未来放疗临床应用不仅对医用电子直线加速器的剂量率提出了更高要求,而且对配套治疗床的摆位也提出了更为灵活、精准、高效的需求。
2、现有的治疗床根据摆位功能分为:三维治疗床、四维治疗床,甚至六维治疗床。其中六维治疗床包含了患者前后、左右、上下三个方向的平移运动,和俯仰角、翻滚角、偏航角三个方向的旋转运动,摆位方式灵活,是未来治疗床的发展方向。
3、但目前市面上的六维治疗床因其固有结构,存在摆位效率、摆位精度等多方面问题。例如,部分六维治疗床采用并联滑轨连杆+多段床板结构,其设备不仅空间需求大,而且大幅度位移调节时效率低,控制过程复杂,其精度难以满足短时间高剂量flash治疗模式下,剂量作用区域高精度适形于肿瘤组织,尽量降低超高剂量率对正常组织伤害的要求。部分六维治疗床采用并联可伸缩丝杆轴+水平、竖直平动控制组件,所述控制组件采用旋转伺服电机、滚轴丝杠等结构,其动态响应、调节精度、负载能力以及稳定性上均有待进一步提高,同时设备运行中的噪音对肿瘤患者的治疗情绪也有一定的负面影响。并且现有治疗床的控制方法中多以碳纤维床上相对固定的一点作为原点进行旋转。当患者靶区与该固定旋转中心不重合时,还需要治疗床进行三方向的平移运动以补偿旋转运动造成的偏移,这样会引入一些额外的运动控制精度偏差。
4、因此,亟需提出一种控制精度高、动态效应快、负载能力强、稳定性好的六维治疗床以及治疗床的运动控制方法,力求满足现代放疗技术对摆位精度、摆位效率的需求。
技术实现思路
1、为解决现有技术中存在的问题,本发明的目的是提供一种六维治疗床及其运动控制方法,本发明提高了放疗过程中的摆位准确度和摆位效率。
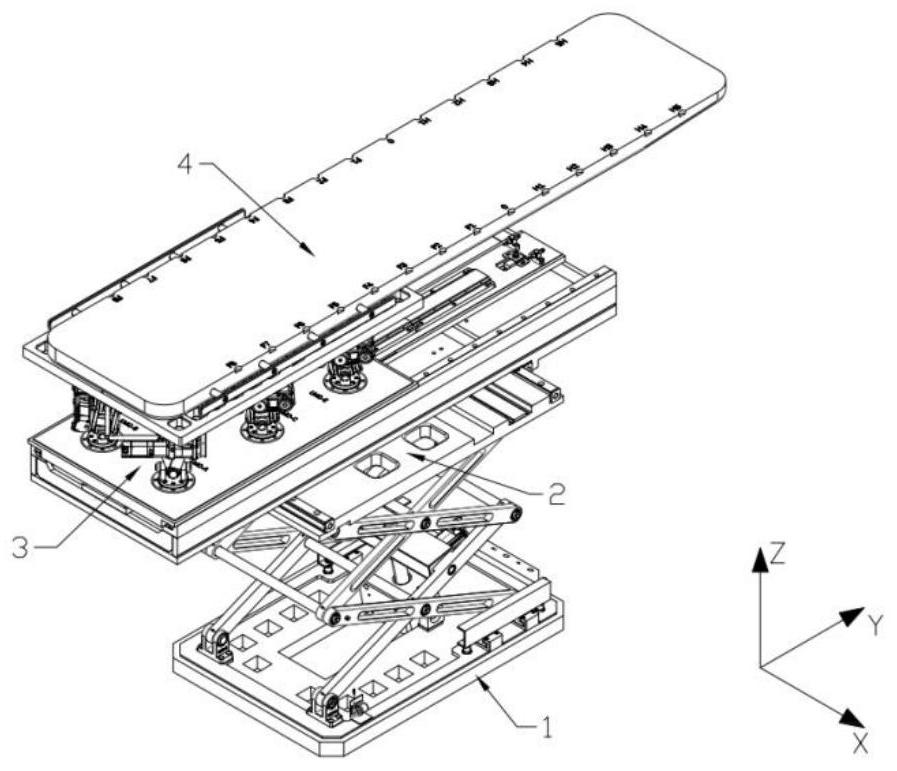
2、为实现上述目的,本发明采用的技术方案是:一种六维治疗床,包括用于驱动治疗床沿z轴移动的z轴组件、设于所述z轴组件上的用于驱动治疗床沿x/y轴移动的x/y轴组件、设于所述x/y轴组件上的x/y/z六维组件和设于所述x/y/z六维组件上的床面板;所述x/y/z六维组件包括底部的静平台和顶部的动平台,所述静平台和动平台之间设有至少六组电动升降组件以及用于驱动所述电动升降组件的驱动部件。
3、作为本发明的进一步改进,所述z轴组件为剪叉式升降结构;所述剪叉式升降结构包括底座和x轴基体,所述底座的一侧设有一对第一导向槽,底座的另一侧设有一对第一固定座,一对所述第一固定座分别通过滚动轴承与一对第一连杆的一端连接,一对所述第一导向槽分别通过凸轮随动器与一对第二连杆的一端连接,一对所述第一连杆和一对所述第二连杆的中心处设有连接孔,并通过滚动轴承和定位杆互相连接;所述x轴基体底部的一侧设有一对第二导向槽,x轴基体底部的另一侧设有一对第二固定座,一对所述第二固定座分别通过滚动轴承与一对第一连杆的另一端连接,一对所述第二导向槽分别通过凸轮随动器与一对第二连杆的另一端连接;所述底座上还设置有第一驱动电机,所述第一驱动电机通过减速机与第一丝杆进行传动,所述第一丝杆的螺母端固定于第一连杆或第二连杆上。
4、作为本发明的进一步改进,一对所述第二固定座与一对所述第一连杆之间还设有一对第三连杆,一对所述第二导向槽和一对所述第二连杆之间还设有一对第四连杆,且一对所述第三连杆和一对所述第四连杆的中心处设有连接孔,并通过滚动轴承和定位杆互相连接。
5、作为本发明的进一步改进,所述x/y轴组件包括y轴基体,所述z轴组件的顶部两侧设置有一对第一导轨,一对所述第一导轨的滑动端安装于所述y轴基体的底部;所述z轴组件的顶部设有第一定子线圈,所述y轴基体的底部与所述第一定子线圈相对的位置设置有第一直线电机;所述y轴基体的顶部设有与所述第一定子线圈垂直的第二定子线圈,顶部两侧还设置有一对第二导轨,所述x/y/z六维组件的底部与所述定子线圈相对的位置设置有第二直线电机,x/y/z六维组件的底部还设置有与所述第二导轨配合滑动的第三导轨。
6、作为本发明的进一步改进,所述电动升降组件包括设于所述静平台上的旋转底座、设于所述动平台底部的第三固定座和8个第五连杆,8个所述第五连杆每4个一组依次首尾铰接组成一对剪叉式结构,所述旋转底座与第一虎克铰的一个旋转轴铰接,所述第一虎克铰的另一旋转轴的两端分别与一对所述剪叉式结构的底部相连;所述第三固定座的底部与第二虎克铰的一个旋转轴铰接,所述第二虎克铰的另一旋转轴的两端分别与一对所述剪叉式结构的顶部相连。
7、作为本发明的进一步改进,所述旋转底座包括旋转盘和交叉滚柱轴环,所述旋转盘通过其盘部与交叉滚柱轴环的内环连接,交叉滚柱轴环的外环与静平台固定连接;旋转盘通过一对耳部与第一虎克铰铰接。
8、作为本发明的进一步改进,所述驱动部件包括第二驱动电机和第二丝杆,所述第二驱动电机通过同步带驱动所述第二丝杆旋转;一对所述剪叉式结构中部铰接处的一侧设置有安装块,另一侧设置有固定块,所述第二丝杆的固定端设置于所述固定块上,螺母端设置于所述安装块上。
9、作为本发明的进一步改进,所述固定块上设置有拉绳编码器,所述拉绳编码器的测量头安装在安装棒上,所述安装棒与第五连杆的铰接轴相连。
10、本发明还提供一种如上所述的六维治疗床的运动控制方法,包括:
11、设变量θ、x0、y0、z0分别表示治疗床公转角度和治疗床主体在x/y/z方向上移动的距离,引入旋转变化矩阵及平移变化矩阵
12、将每一组电动升降组件与静平台以及动平台的连接点简化为旋转铰点,连接点的空间向量分别表示为rx和rx,则:
13、
14、其中,表示每一组电动升降组件与静平台连接点的空间初始向量,分别表示每一组电动升降组件与静平台连接点的空间初始向量的矩阵表示的各分量;
15、
16、其中,表示每一组电动升降组件与动平台连接点的空间初始向量,分别表示每一组电动升降组件与动平台连接点的空间初始向量的矩阵表示的各分量;
17、根据坐标转换关系,得每一组电动升降组件与动平台连接点的动、静坐标系中任意一矢量的转化关系如下:
18、rx=t0·rx+p0
19、rx为每一组电动升降组件与动平台连接点在静坐标系的空间向量,rx为每一组电动升降组件与动平台连接点在动坐标系的空间向量,t0和p0分别表示x/y/z六维组件的旋转变化矩阵及平移变化矩阵;
20、则电动升降组件的升降矢量lx为:
21、lx=rx-rx。
22、作为本发明的进一步改进,x/y/z六维组件的旋转变化矩阵ti具体如下:
23、ti=rz(γ)ry(β)rx(α)
24、其中,rx(α)、ry(β)、rz(γ)为旋转算子,分别表示动平台绕x轴旋转α角度,绕y轴旋转β角度,绕z轴旋转γ角度,且:
25、
26、
27、
28、x/y/z六维组件的平移变化矩阵p0具体如下:
29、
30、其中,xi、yi、zi分别表示x/y/z六维组件在空间中沿x/y/z方向的平移距离;
31、将旋转变化矩阵ti和平移变化矩阵pi代入每一组电动升降组件与动平台连接点的动、静坐标系中任意一矢量的转化关系得到:
32、
33、从而得到电动升降组件的升降矢量如下:
34、
35、本发明的有益效果是:
36、1、本发明在x轴与y轴的平移运动上选择了直线电机作为驱动方案,相较于传统方案大幅度提高了传动刚度、运动定位精度以及大位移情况下的动态响应性能,并且由于直线电机不需要传动装置,所以也提高了整体效率,减少了噪音和振动,简化了系统结构,降低了整体维护成本;
37、2、本发明中x/y/z六维组件采用多组剪刀式结构,不仅有利于精确的六维运动控制,而且每组剪刀式结构采用的是并联双剪刀结构,其传动刚度、稳定性、负载能力方面均有很大提升,能够确保患者摆位精度,尤其是体重较大患者的摆位精度;
38、3、通过实时位置检测,使得x/y/z六维组件能够在不同位置处都能以等中心位置为原点调节患者体位,无需治疗床直线运动补偿旋转调节时造成的空间位移,避免了直线运动引入的定位误差,从而进一步提高控制精度。
- 还没有人留言评论。精彩留言会获得点赞!