器械开合操控装置和医用机器人的制作方法
本发明涉及机器人,尤其涉及一种器械开合操控装置和医用机器人。
背景技术:
1、医用机器人在进行手术时,需要医生通过器械开合操控装置进行控制,从而输出控制指令。现有技术中,器械开合操控装置采用连杆滑块机构或者多连杆机构与传感器组件配合,通过按压连杆滑块机构或者多连杆机构上设置的手柄,使得传感器组件中感应组件进行联动,从而触发传感器,输出控制指令。但是采用连杆机构占用空间大,连杆机构组装繁琐,而且作为应用于人体的医疗器械,以往技术主要强调手术操作的准确性和精度,忽略手部脱离器械时的状态检测,安全性会大打折扣。
2、因此,需要一种器械开合操控装置和医用机器人来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种器械开合操控装置和医用机器人,占用空间小,便于组装,而且安全性能较高。
2、为达此目的,本发明采用以下技术方案:
3、器械开合操控装置,包括:
4、壳主体,所述壳主体上转动设置有第一齿轮件和第二齿轮件,所述第一齿轮件与所述第二齿轮件啮合;
5、第一手柄,所述第一手柄的一端与所述第一齿轮件连接,所述第一手柄与所述壳主体之间设置有第一弹性件,所述第一弹性件的一端与所述第一手柄抵接,所述第一弹性件的另一端与所述壳主体抵接;
6、第二手柄,所述第二手柄的一端与所述第二齿轮件连接;
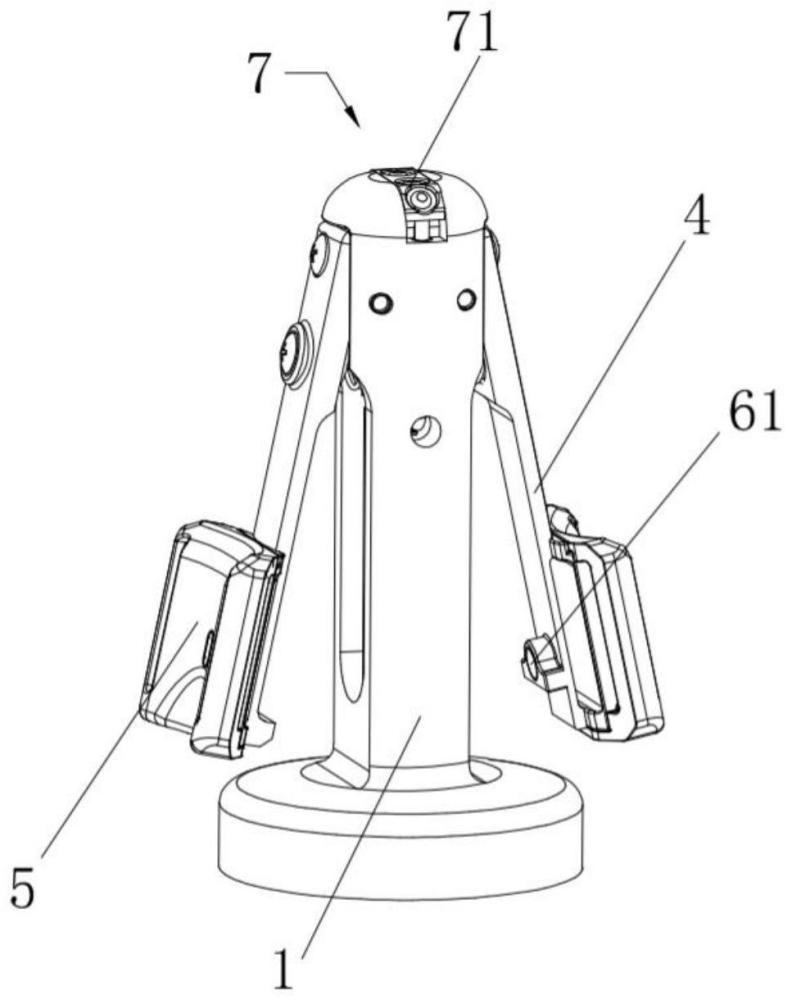
7、操控检测件,所述操控检测件用于检测所述器械开合操控装置是否被操控;
8、传感操控组件,设置在所述第一手柄与所述壳主体之间,所述传感操控组件能够检测所述第一手柄与所述壳主体之间的距离变化,从而产生控制信号。
9、进一步地,所述操控检测件包括红外传感器,所述红外传感器设置在所述壳主体的端部。
10、进一步地,所述传感操控组件包括磁铁和磁感应件,所述磁铁设置在所述第一手柄上,所述磁感应件设置在所述壳主体上。
11、进一步地,所述第一手柄朝向所述壳主体的一侧设置有安装槽,所述磁铁嵌设在所述安装槽中。
12、进一步地,所述第一齿轮件具有部分轮齿,所述第一齿轮件上开设有销轴孔和螺纹孔,销轴穿过销轴孔与所述壳主体连接,螺接件穿过所述第一手柄的一端与所述第一齿轮的螺纹孔螺接。
13、进一步地,所述第一齿轮件的下端具有限位面。
14、进一步地,所述壳主体上开设有连接孔,螺栓穿过第一弹性件与所述连接孔连接。
15、进一步地,所述第二手柄与壳主体之间设置有第二弹性件,所述第二弹性件的一端与所述壳主体连接,所述第二弹性件的长度小于所述第一弹性件的长度。
16、进一步地,所述第二手柄朝向所述壳主体的一侧设置有限位部。
17、医用机器人,包括机器人本体和如上所述的器械开合操控装置,所述器械开合操控装置能够控制所述机器人本体动作。
18、本发明的有益效果:
19、本发明所提供的一种器械开合操控装置,在壳主体上转动设置有第一齿轮件和第二齿轮件,第一齿轮件和第二齿轮件啮合,第一手柄与第一齿轮件连接,第二手柄与第二齿轮件连接,在第一手柄与壳主体之间设置有第一弹性件,在第一手柄与壳主体之间设置有传感操控组件,传感操控组件能够检测第一手柄与壳主体之间的距离变化,从而产生控制信号,控制移动机器人进行动作,操控检测件用于检测器械开合操控装置是否被操控。通过采用第一齿轮件和第二齿轮件啮合传动配合,取代原有的连杆结构,从而减少空间的占用,便于进行组装。而且在第一手柄与壳主体之间设置第一弹性件,在操控的过程中,第一手柄和第二手柄通过齿轮传动联动,第一弹性件提升操作的手感。通过设置操控检测件,能够对器械开合操控装置是否被操控进行检测,避免器械开合操控装置误动作,从而提升使用安全性。
20、本发明所提供的一种医用机器人,包括机器人本体和如上所述的器械开合操控装置,器械开合操控装置占用空间小,便于组装,而且安全性能较高。
技术特征:
1.器械开合操控装置,其特征在于,包括:
2.根据权利要求1所述的器械开合操控装置,其特征在于,所述操控检测件(7)包括红外传感器(71),所述红外传感器(71)设置在所述壳主体(1)的端部。
3.根据权利要求1所述的器械开合操控装置,其特征在于,所述传感操控组件(6)包括磁铁(61)和磁感应件(62),所述磁铁(61)设置在所述第一手柄(4)上,所述磁感应件(62)设置在所述壳主体(1)上。
4.根据权利要求3所述的器械开合操控装置,其特征在于,所述第一手柄(4)朝向所述壳主体(1)的一侧设置有安装槽,所述磁铁(61)嵌设在所述安装槽中。
5.根据权利要求1所述的器械开合操控装置,其特征在于,所述第一齿轮件(2)具有部分轮齿,所述第一齿轮件(2)上开设有销轴孔(21)和螺纹孔(22),销轴穿过销轴孔(21)与所述壳主体(1)连接,螺接件(41)穿过所述第一手柄(4)的一端与所述第一齿轮的螺纹孔(22)螺接。
6.根据权利要求1所述的器械开合操控装置,其特征在于,所述第一齿轮件(2)的下端具有限位面(23)。
7.根据权利要求1所述的器械开合操控装置,其特征在于,所述壳主体(1)上开设有连接孔,螺栓(43)穿过第一弹性件(42)与所述连接孔连接。
8.根据权利要求1所述的器械开合操控装置,其特征在于,所述第二手柄(5)与壳主体(1)之间设置有第二弹性件(51),所述第二弹性件(51)的一端与所述壳主体(1)连接,所述第二弹性件(51)的长度小于所述第一弹性件(42)的长度。
9.根据权利要求1所述的器械开合操控装置,其特征在于,所述第二手柄(5)朝向所述壳主体(1)的一侧设置有限位部。
10.医用机器人,其特征在于,包括机器人本体和如权利要求1-9任一项所述的器械开合操控装置,所述器械开合操控装置能够控制所述机器人本体动作。
技术总结
本发明涉及机器人技术领域,尤其涉及一种器械开合操控装置和医用机器人,器械开合操控装置包括壳主体,所述壳主体上转动设置有第一齿轮件和第二齿轮件,所述第一齿轮件与所述第二齿轮件啮合;第一手柄,所述第一手柄的一端与所述第一齿轮件连接,所述第一手柄与所述壳主体之间设置有第一弹性件,所述第一弹性件的一端与所述第一手柄抵接,所述第一弹性件的另一端与所述壳主体抵接;第二手柄,所述第二手柄的一端与所述第二齿轮件连接;操控检测件,所述操控检测件用于检测所述器械开合操控装置是否被操控;传感操控组件,设置在所述第一手柄与所述壳主体之间。本发明占用空间小,便于组装,而且安全性能较高。
技术研发人员:李博宇,姜海洋,刘畅,王晓珏,苏衍宇
受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!