介入机器人的制作方法
本发明涉及医疗器械领域,特别涉及一种介入机器人。
背景技术:
1、在进行血管介入手术的过程中,医生需要依据术前的地图以及术中采集到的地图等数据作为参考,通过控制导管或导丝运动的方式进行手术。目前的技术存在如下技术问题:
2、(1)医生需要长时间控制多个执行机构以分别带动多个导丝或导管移动以进行手术,对手术医生要求高、容易存在失误、手术失败可能性高。
3、(2)目前市面上的血管介入机器人主要是定制型,具体是指针对于特定的手术定制设计,因此功能单一,难以进行通用化,针对不同术室需要不同的手术设备,这样造成医院设备购买昂贵,维护、更换也很不方便。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中的缺陷,提供一种介入机器人。
2、本发明是通过下述技术方案来解决上述技术问题:
3、一种介入机器人,其包括:
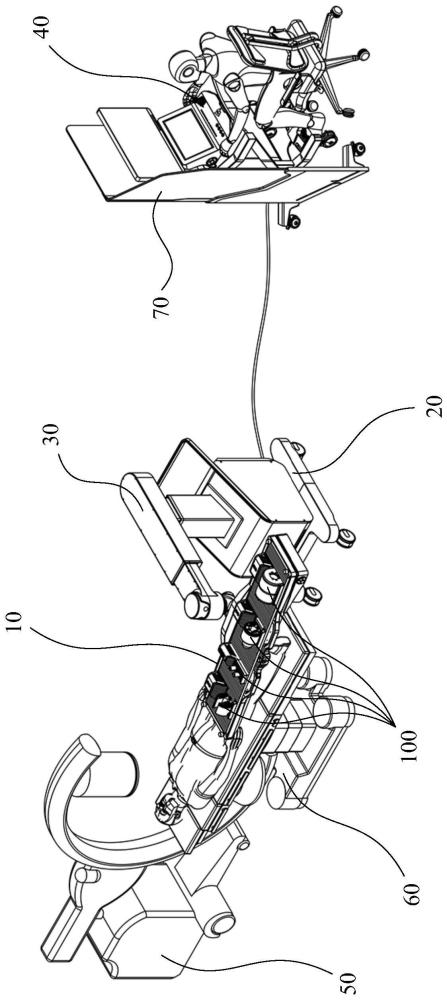
4、主端设备,所述主端设备能够获取输入数据,并基于所述输入数据生成控制数据;
5、从端设备,所述从端设备包括多个执行模块,所述执行模块用于操作介入件,所述主端设备将所述控制数据通过有线或无线的方式发送至所述从端设备的各所述执行模块,所述执行模块基于所述控制数据控制至少一个介入件进行直线、旋捻、控弯的独立或复合动作。
6、该介入机器人,其主端设备是指供医生操作设备的一端,通过医生对主端设备进行控制,通过有线或无线通讯的方式实现对从端设备上各执行模块的控制,避免了目前需要医生长时间控制多个介入器械设备而对手术医生要求高、容易存在失误、手术失败可能性高的问题,进而达到精准控制各执行模块驱动介入件进行移动、降低手术对患者的伤害、提高手术成功率。
7、进一步的,所述主端设备包括控制模块和数据输入模块,所述数据输入模块用于获取输入数据,并将所述输入数据输送至所述控制模块,所述控制模块基于所述输入数据生成所述控制数据,并将所述控制数据发送至所述执行模块。
8、通过进一步设置数据输入模块,以便于获取和接收输入数据。其中,输入数据可以通过多种方式来获取,例如:(1)通过对图像进行处理的方式获得输入数据。其中,通过对图像进行处理的方式获得输入数据的情况下,图像的来源也是多样化的,可以是ct扫描的图像,也可以是所操纵的介入件末端摄像头所回传的图像;(2)经由医生与数据输入模块进行交互的方式以输入的控制介入件进行运动的数据;(3)通过传感器检测并回传的数据;(4)术前地图所规划的数据。
9、进一步的,所述主端设备的所述控制模块和所述数据输入模块相对所述从端设备具有以下一种布局方式:
10、(1)所述控制模块和所述数据输入模块均设置于所述从端设备的外部;
11、(2)所述控制模块设置于所述从端设备的内部,所述数据输入模块设置于所述从端设备的外部;
12、(3)所述控制模块和所述数据输入模块均设置于所述从端设备的内部。
13、进一步的,所述主端设备还包括数据输出模块,所述数据输出模块用于向用户输出数据。
14、进一步的,所述数据输入模块包括数据输入接口、操作手柄、触摸屏、脚踏和按钮中的至少一种。
15、对于将控制模块和数据输入模块设置在从端设备上的方案,可以提高介入机器人的设备集成度。而将控制模块和数据输入模块设置在从端设备外部的方案,可便于实现从端设备和主端设备在空间上隔离,避免医生在操控主端设备进行手术时受辐射的影响。
16、其中,数据输出模块用于向用户输出数据的方式可以是多样的,可以是图形图像显示的方式进行输出,也可以是打印、声音、灯光指示等方式进行输出,较为优选的输出方式是是图形图像显示方式,可采用显示器或者触摸屏来实现输出目的。
17、另外,数据输入模块可采用数据输入接口、操作手柄、触摸屏、脚踏和按钮中的至少一种来实现数据输入。其中,数据输入接口用于与主端设备外部的其他设备进行对接以实现数据输入,具体可以用于与医院的数据输入线缆进行对接,以使得外部数据能够输入至主端设备中。而操作手柄、触摸屏、脚踏和按钮用于与操纵者(医生)进行交互,通过现场操作者的操作实现数据输入。
18、进一步的,所述介入机器人还包括防辐射屏,所述防辐射屏相邻于所述主端设备设置。
19、通过在主端设备附近设置防护罩组件,以保护操作主端设备的操纵者(医生)免于收到辐射影响,以进一步实现辐射的隔离。
20、进一步的,所述介入机器人还包括台车支持台架,所述主端设备设置于所述台车支持台架上。
21、同时设置台车支持台架以承载主端设备,方便主端设备进行移动以调整位置。
22、进一步的,所述从端设备包括操作手柄、触摸屏、脚踏和按钮中的至少一种。
23、通过设置操作手柄、触摸屏、脚踏和按钮中的至少一种,以提高与操纵者(医生)的人机交互程度。
24、进一步的,所述主端设备将所述控制数据发送至多个所述执行模块,多个所述执行模块基于所述控制数据共同控制至少一个介入件进行直线、旋捻、控弯的复合动作。
25、通过将控制数据发送至多个执行模块,以通过多个执行模块共同控制介入件,使介入件能够做出相对更复杂的动作。
26、进一步的,所述从端设备还包括:
27、基板模块;
28、多个行走模块,所述行走模块与所述执行模块一一对应,各所述行走模块分别设置于所述基板模块上,并能够沿所述基板模块的水平延伸方向在所述基板模块上往复移动;
29、所述主端设备还将所述控制数据通过有线或无线的方式发送至所述行走模块,所述行走模块基于所述控制数据在所述基板模块上往复移动;
30、所述行走模块与所述基板模块之间的电气连接和/或机械连接为可拆卸快装连接。
31、在本方案中,该从端设备通过在基板模块上设置多个可独立移动的行走模块,以分别供执行模块进行安装,使各执行模块共同完成对介入件的操作。其中,通过拆装和调换位于行走模块上的执行模块,以在行走模块的移动驱动下实现不同的功能,满足不同的使用需求。行走模块相对基板模块能够拆装,以使得从端设备能够根据具体手术需求调整设置在基板模块上的行走模块数量。且行走模块相对基板模块的电气连接和机械连接均能实现通断,设备兼容性更好。
32、进一步的,所述执行模块分别可拆卸连接于对应的所述行走模块上;
33、其中,所述执行模块包括旋转模块和/或控弯模块。
34、通过在执行模块上设置旋转模块或控弯模块中的至少一种,以与行走模块共同配合,实现控制介入件进行前进后退与旋转的复合动作,或者进行前进后退与控弯的复合动作。
35、进一步的,所述控制数据经由所述行走模块通过有线传输方式发送至所述执行模块;
36、当所述执行模块相对所述行走模块进行安装时,所述执行模块与所述行走模块之间构成有线传输连接;
37、当所述执行模块相对所述行走模块进行拆卸时,所述执行模块与所述行走模块之间断开有线传输连接。
38、在本方案中,通过结构设置使得执行模块相对行走模块拆装过程中能够同时构成其物理和有线通讯连接,实现简化结构目的。
39、进一步的,所述从端设备还包括快装机构,所述执行模块通过快装机构连接于所述行走模块上。
40、在本方案中,通过采用快装连接方式实现执行模块相对行走模块的拆装,相比于其他可拆卸连接方式,在拆装速度和拆装难度方面更具优势。同时,该从端设备对执行模块的洁净度要求较高,为避免行走模块、基板模块对执行模块造成污染,在从端设备使用过程中会在执行模块和行走模块、基板模块之间设置隔膜,防止造成相互污染。其中,实现快装方式的手段是多样的,例如依靠磁吸、吸盘吸附等方式都可以实现。其中,进一步采用磁吸连接方式作为一种非接触连接方案,能够在执行模块与行走模块、基板模块隔开的情况下实现连接,以避免净化等级相对较低的基板模块和行走模块对执行模块的洁净度造成影响。
41、进一步的,所述从端设备还包括定位机构,所述定位机构包括尺寸相适配的定位销和定位孔,所述定位销设置于所述执行模块底部并向下延伸,所述定位孔形成在所述行走模块的顶面上。
42、在本方案中,执行模块相对行走模块进一步以定位销和定位孔配合的方式实现定位,相比其他定位方案,在拆装速度和拆装难度方面更具优势。此外,销孔连接与包含磁吸在内的各种快装连接方式可以相互配合,确保执行模块能够稳定可靠的连接在行走模块上。
43、进一步的,所述定位销分布在所述执行模块底部的四个端角位置处,所述快装机构在所述执行模块底部的设置位置位于两个所述定位销之间。
44、在本方案中,通过将定位销分布设置在执行模块底部的四个端角位置处,从而提供一种相对稳定的定位连接方案,使各定位销在连接过程中受到的作用力相近,保证执行模块可靠连接于行走模块。
45、进一步的,所述从端设备还包括驱动机构,所述驱动机构包括:
46、齿条,所述齿条设置于所述基板模块,所述齿条沿所述基板模块的水平延伸方向布置;
47、齿轮和电机,所述齿轮分别设置于各所述行走模块,所述电机用于驱动所述齿轮旋转,所述齿轮啮合于所述齿条。
48、在本方案中,相比采用其他结构来实现行走模块相对基板模块的位移,齿轮齿条之间的啮合不易打滑,位移精度高,并且多个行走模块可以共用基板模块上的单根齿条,简化结构。同时,如此结构设置还可以进一步降低基板模块的厚度,以使得设置于基板模块上的执行模块所操作的介入件能够更加靠近患者身体。
49、进一步的,所述齿条在所述基板模块上以齿面朝上的方式设置。
50、在本方案中,当基板模块因自身重量或设置的执行模块重量而弯曲形变时,设置在基板模块上的齿条也会随之产生形变,相比于将齿条的齿面朝向其他方向设置,将齿面朝上设置能够有效降低齿条弯曲形变对齿面造成的影响,进而在齿面弯曲情况下保证与齿轮之间的有效啮合,避免齿轮在齿面上卡死而导致传动失效。同时,如此结构设置可以进一步降低基板模块的厚度,以使得设置于基板模块上的执行模块所操作的介入件能够更加靠近患者身体。
51、进一步的,所述驱动机构还包括调整机构,所述调整机构与所述齿轮一一对应设置,所述齿轮通过所述调整机构活动连接于所述行走模块,所述调整机构用于调节所述齿轮与所述行走模块的间距,以使所述齿轮保持啮合于所述齿条。
52、在本方案中,通过设置调整机构以调整齿轮与行走模块之间的间距,使得齿轮保持啮合于齿条的状态,提高行走模块及执行模块的位移精度。
53、进一步的,所述调整机构包括:
54、摆杆,所述摆杆的一端铰接于所述行走模块的底部,所述齿轮旋转设置于所述摆杆的另一端;
55、弹性件,所述弹性件设置于所述摆杆和所述行走模块之间,所述弹性件用于向所述摆杆施加远离所述行走模块的弹性力。
56、在本方案中,摆杆的一端铰接于行走模块的底部,作为摆动的中心,齿轮旋转设置于摆杆的另一端,通过弹性件施加的弹力使得齿轮能够保持压紧在齿条上,以相对简单可靠的结构实现齿轮始终啮合于齿条的目的。
57、进一步的,所述电机设置于所述摆杆上。
58、在本方案中,通过将驱动齿轮转动的电机也同样设置在摆杆上,以简化电机与齿轮之间的传动机构结构复杂程度,实现简化结构的目的。
59、进一步的,所述从端设备还包括导向机构,所述导向机构包括:
60、导轨,所述导轨设置于所述基板模块,所述导轨沿所述基板模块的水平延伸方向布置;
61、滑块,所述滑块分别设置于各所述行走模块,所述滑块滑动定位于所述导轨。
62、在本方案中,通过设置导轨与滑块对各行走模块进行导向,确保行走模块在基板模块上精确移动,并且多个行走模块可以共用基板模块上的单根导轨进行导向,简化结构。
63、进一步的,两根所述导轨分别布置在所述齿条的两侧。
64、在本方案中,通过该结构布局,可进一步提高导轨与滑块对行走模块的导向能力。
65、进一步的,所述从端设备还包括拖链,所述拖链的数量与所述行走模块的数量相同,各所述拖链均布置在所述基板模板上,所述拖链的端部连接于对应的所述行走模块;沿竖直方向,各所述拖链之间相对叠放设置。
66、在本方案中,通过设置拖链对应连接各行走模块,便于将控制电信号或电力输送从基板模块输送至行走模块的同时,还可以避免线缆缠绕。同时,将多个拖链沿竖直方向叠放设置,结构布局更加紧凑。
67、进一步的,所述从端设备还包括电性连接机构,所述电性连接机构包括第一触点和第二触点,所述第一触点设置于所述执行模块,所述第二触点设置于所述行走模块,当所述执行模块连接于所述行走模块时,所述第一触点和所述第二触点相接触并电性连接。
68、在本方案中,通过触点接触的方式实现执行模块与行走模块之间的电性连接,便于行走模块上的控制电信号或电力输送至执行模块。同时,通过触点接触方式实现电性连接,在执行模块相对行走模块拆卸时能够及时断开电路,拆装和使用更加便捷。
69、进一步的,所述从端设备还包括手持控制模块,沿所述基板模块的水平延伸方向,所述手持控制模块挂载于所述基板模块的端部;
70、所述手持控制模块通过弹性电缆与所述基板模块电性连接。
71、在本方案中,通过在基板模块的侧面挂载手持控制模块,通过手持控制模块方便对从端设备进行操控,其中,手持控制模块与基板模块依靠弹性电缆实现电性连接,方便用户在取下手持控制模块的情况下进行使用。
72、进一步的,所述介入机器人还包括:
73、底座,所述底座能够水平移动;
74、位移调整机构,所述从端设备通过所述位移调整机构连接于所述底座,所述位移调整机构能够驱动所述从端设备相对所述底座实现升降、平移或水平旋转运动中的至少一种运动。
75、在本方案中,通过利用位移调整机构驱动从端设备相对底座实现升降、平移或水平旋转运动中的至少一种运动,以及底座的水平移动,可以使得从端设备的运动方位更为灵活,可以更好的调整角度将执行模块所操作的介入件更加靠近患者身体。
76、本发明的积极进步效果在于:
77、该介入机器人,通过医生对主端设备进行控制和/或提前进行手术规划,通过有线或无线通讯的方式实现对从端设备上各执行模块的主动控制和/或自动运行,避免了目前需要医生长时间控制多个介入器械设备而对手术医生要求高、容易存在失误、手术失败可能性高的问题,进而达到精准控制各执行模块驱动介入件进行移动、降低手术对患者的伤害、提高手术成功率。
- 还没有人留言评论。精彩留言会获得点赞!