血管介入系统、控制方法和控制装置与流程
本技术涉及医学图像处理,特别是涉及一种血管介入系统、控制方法和控制装置。
背景技术:
1、血管类疾病是人类健康的重大威胁,针对血管类疾病,通常采用血管介入技术,将导丝/导管推进至血管内,并对血管内的病灶进行相关处理。
2、传统地,血管介入系统包括位于操作室的血管造影机(c形臂)和机械臂,以及位于操作室的机械装置;医生通过操作机械装置来控制机械臂,进而通过机械臂将导丝/导管推进至患者的血管内。在将导丝/导管推进至血管的过程中,需要借助血管造影机对导丝/导管进行实时透视成像,并将导丝/导管的实时图像与术前的血管图像进行融合后通过操作室内的显示屏幕进行实时呈现,以便医生通过观察显示屏幕来实时掌握导丝/导管与血管内病灶之间的相对位置关系,进而操作机械装置来控制导丝/导管在血管内移动。
3、然而,采用传统的血管介入系统在进行血管介入操作时,存在操作效率不高的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高血管介入操作效率的血管介入系统、血管介入系统的控制方法、装置、电子设备、计算机可读存储介质和计算机程序产品。
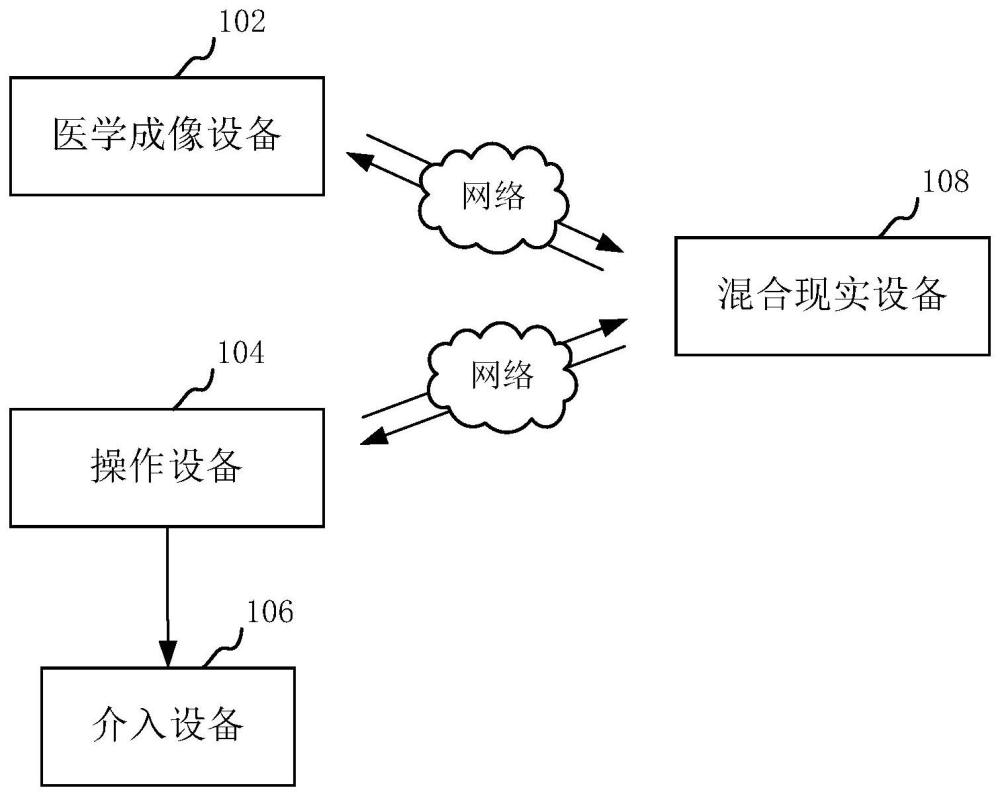
2、第一方面,本技术提供了一种血管介入系统,包括:医学成像设备、操作设备、介入设备和混合现实设备;
3、医学成像设备,用于对血管中的介入设备进行成像,得到介入设备的三维坐标数据;
4、混合现实设备,用于将三维坐标数据和血管的术前影像数据进行融合处理,得到并显示融合影像;
5、混合现实设备,还用于控制操作设备带动介入设备在血管中移动。
6、在其中一个实施例中,操作设备包括机械臂和磁导航设备;机械臂的末端夹具连接介入设备的远离血管的尾部;
7、混合现实设备,用于控制机械臂带动介入设备的尾部沿血管的第一方向移动;
8、或者,混合现实设备,用于控制机械臂带动介入设备的尾部沿血管的第二方向移动,同时控制磁导航设备调整介入设备的靠近血管的头部的移动方向;第二方向和第一方向不一致。
9、在其中一个实施例中,混合现实设备,还用于接收用户的操作指令,根据操作指令确定介入设备的移动信息,并根据移动信息确定目标操作设备,以及控制目标操作设备带动介入设备移动;目标操作设备为机械臂,或者,目标操作设备包括机械臂和磁导航设备。
10、在其中一个实施例中,混合现实设备,用于根据三维坐标数据以及预设规划路径,确定介入设备的移动信息,并根据移动信息确定目标操作设备,以及控制目标操作设备带动介入设备移动;目标操作设备为机械臂,或者,目标操作设备包括机械臂和磁导航设备。
11、在其中一个实施例中,若目标操作设备为机械臂,则控制机械臂带动介入设备的尾部沿血管的第一方向移动的同时,控制磁导航设备消除对介入设备的头部的磁场作用力;
12、若目标操作设备包括机械臂和磁导航设备,则在控制机械臂带动介入设备的尾部沿血管的第二方向移动的同时,控制磁导航设备施加磁场作用力以调整介入设备的头部的移动方向。
13、在其中一个实施例中,混合现实设备,具体用于对融合影像中的血管和介入设备进行不同属性的渲染,得到并显示渲染后的融合影像;其中,属性包括亮度、颜色、透明度中的至少一种。
14、第二方面,本技术还提供了一种血管介入系统的控制方法,该控制方法应用于第一方面中的血管介入系统;
15、通过医学成像设备对血管中的介入设备进行成像,得到介入设备的三维坐标数据;
16、通过混合现实设备将三维坐标数据和血管的术前影像数据进行融合处理,得到并显示融合影像;
17、通过混合现实设备控制操作设备带动介入设备在血管中移动。
18、在其中一个实施例中,操作设备包括机械臂和磁导航设备;通过混合现实设备控制操作设备带动介入设备在血管中移动,包括:
19、通过混合现实设备接收用户的操作指令,根据操作指令确定介入设备的移动信息,并根据移动信息确定目标操作设备;目标操作设备为机械臂,或者,目标操作设备包括机械臂和磁导航设备;
20、若目标操作设备为机械臂,则通过混合现实设备控制机械臂带动介入设备的远离血管的尾部沿血管的第一方向移动,同时控制磁导航设备消除对介入设备的靠近血管的头部的磁场作用力;
21、若目标操作设备包括机械臂和磁导航设备,则通过混合现实设备控制机械臂带动介入设备的尾部沿血管的第二方向移动,同时控制磁导航设备施加磁场作用力以调整介入设备的头部的移动方向。
22、在其中一个实施例中,通过混合现实设备控制操作设备带动介入设备在血管中移动,包括:
23、通过混合现实设备获取预设规划路径,并根据三维坐标数据以及预设规划路径,控制操作设备带动介入设备在血管中移动。
24、在其中一个实施例中,该方法还包括:
25、通过混合现实设备对融合影像中的血管和介入设备进行不同属性的渲染,得到并显示渲染后的融合影像;其中,属性包括亮度、颜色、透明度中的至少一种。
26、第三方面,本技术还提供了一种血管介入系统的控制装置,该控制装置应用于第一方面中的血管介入系统;该装置包括:
27、成像模块,用于对血管中的介入设备进行成像,得到介入设备的三维坐标数据;
28、显示模块,用于将三维坐标数据和血管的术前影像数据进行融合处理,得到并显示融合影像;
29、控制模块,用于控制操作设备带动介入设备在血管中移动。
30、第四方面,本技术还提供了一种电子设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述第二方面中的血管介入系统的控制方法的步骤。
31、第五方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述第一方面中的血管介入系统的控制方法的步骤。
32、第六方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面中的血管介入系统的控制方法的步骤。
33、上述血管介入系统、血管介入的控制方法、装置、电子设备、存储介质和计算机程序产品,该血管介入系统包括医学成像设备、操作设备、介入设备和混合现实设备;其中,医学成像设备,用于对血管中的介入设备进行成像,得到介入设备的三维坐标数据;混合现实设备,用于将三维坐标数据和血管的术前影像数据进行融合处理,得到并显示融合影像;混合现实设备,还用于控制操作设备带动介入设备在血管中移动。采用本实施例提出的血管介入系统,一方面,能够通过混合现实设备实现对介入设备和血管的空间立体显示,使得用户能够在真实物理空间中实时观看到三维的介入设备在三维的血管内的移动情况;相比于传统的二维屏幕显示效果,能够增强介入设备与血管的三维融合显示的空间感和立体感,提高融合图像的显示效果。另一方面,还能够通过混合现实设备的人机交互,实现对介入设备的远程控制,即通过在虚拟空间中操作虚拟介入设备,同步控制操作设备带动真实介入设备在血管中移动;相比于传统的通过操作机械装置来控制机械臂的方式而言,极大地降低了对操作设备的控制难度,进而能够提高血管介入的操作效率。另外,在远程操作的场景下,还能避免医生现场参与血管介入操作对医生造成的辐射影响,提高血管介入的操作安全性。
- 还没有人留言评论。精彩留言会获得点赞!