输送装置以及手术机器人的制作方法
本技术涉及医疗器械,特别是涉及一种输送装置以及手术机器人。
背景技术:
1、血管介入手术机器人是一种微创治疗机器人,在影像设备的辅助下,在血管上开设微创的小口,将导丝等医疗器械通过该小口通过血管介入机器人的驱动部分输送到达病变部位进行治疗。
2、目前的用于手术机器人的导丝或导管的移动可以通过转盘的转动实现,即通过转盘转动,转盘上的槽驱动导丝或导管前进或后退。导丝或导管前进时从转盘上的槽内排出,导丝或导管后退时重新进入转盘上的槽内。转盘上的槽可能有多圈,导丝或导管重新进入转盘上的槽时,理想状态下依次进入不同的圈。但是现有的结构可能导致导丝或导管进入同一圈的槽内,从而导致导丝或导管堆积在该槽内。
3、如何保证导丝或导管在重新进入转盘上的槽内时,能够进入正确的槽位,而不会使导丝或导管都进入同一处的槽位而导致导丝或导管在槽位内堆积是本领域亟需解决的技术问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种输送装置以及手术机器人。
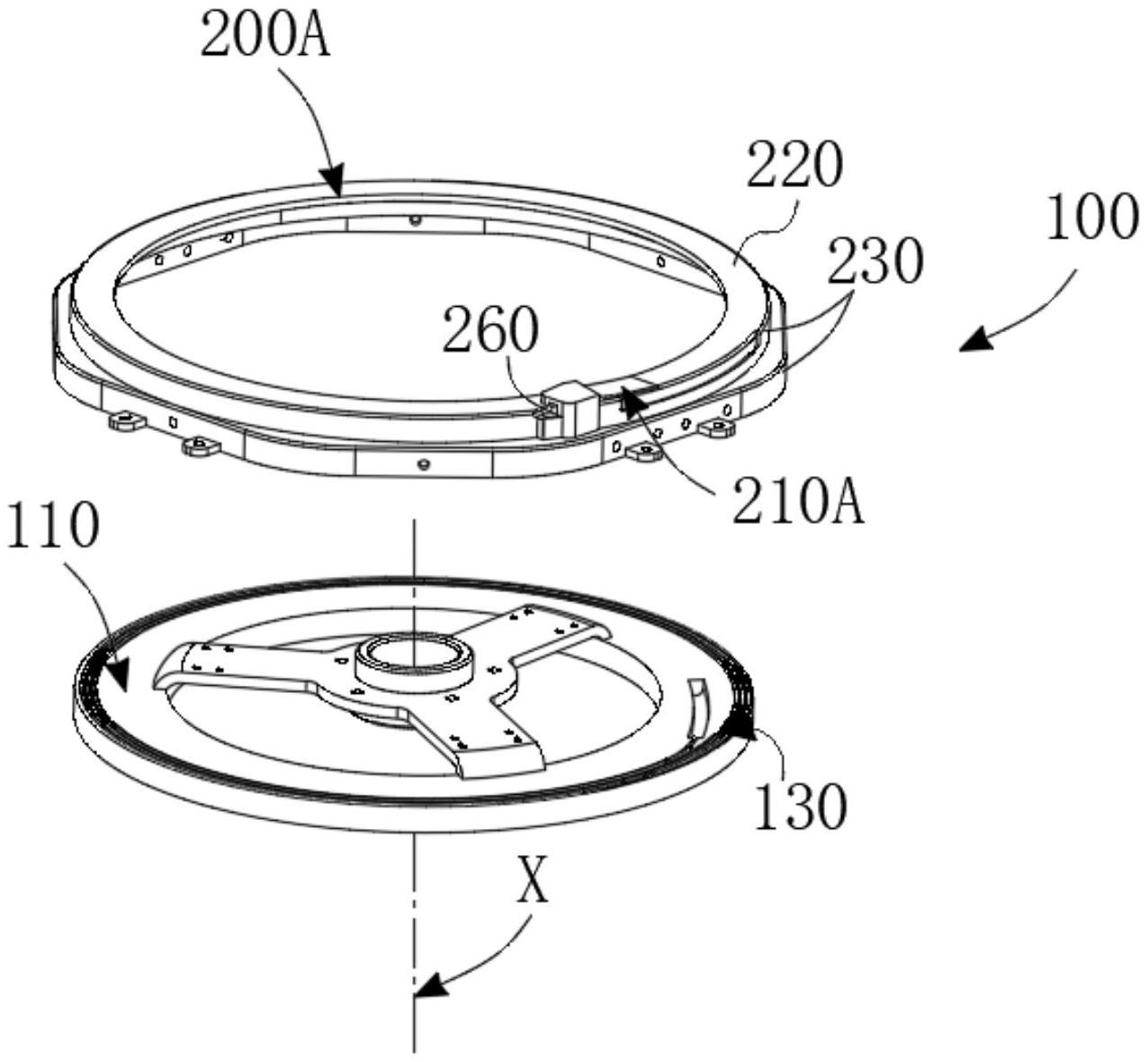
2、一种输送装置,包括:
3、输送转盘,所述输送转盘上开设有具有槽口的驱动槽,所述驱动槽用于收容细长医疗器械,所述输送转盘能够绕旋转轴线旋转以使所述细长医疗器械的部分经所述槽口进出所述驱动槽;以及
4、限位引导件,所述限位引导件包括能与所述输送转盘相对运动的限位引导部,所述限位引导部覆盖至少部分所述槽口,所述限位引导部被配置为引导所述细长医疗器械进入所述驱动槽,并将所述细长医疗器械限位于所述驱动槽内。
5、在其中一个实施例中,所述限位引导件包括设置于所述限位引导部上的第二引导面以及设置于所述限位引导部外的第一引导面,所述第一引导面用于将所述细长医疗器械引导至所述第二引导面,所述第二引导面用于将所述细长医疗器械引导至所述驱动槽内。
6、在其中一个实施例中,所述第二引导面包括了与所述槽口的边缘的距离变化的部位;或
7、所述第二引导面包括了与所述槽口的边缘距离不变的部位。
8、在其中一个实施例中,所述限位引导件为盖子结构,所述限位引导件包括上盖板,所述上盖板覆盖所述输送转盘的上表面的至少部分区域,所述限位引导部设置于所述上盖板。
9、在其中一个实施例中,所述输送装置还包括底座,所述输送转盘转动连接于所述底座,所述限位引导件固定连接于所述底座。
10、在其中一个实施例中,所述限位引导件包括支撑件,所述支撑件连接所述底座和所述限位引导部,所述支撑件和所述限位引导部形成l形结构。
11、在其中一个实施例中,所述输送转盘上设置有用于限制槽口宽度的限位件。
12、在其中一个实施例中,所述驱动槽连续延伸形成多圈,所述输送转盘旋转使所述驱动槽的每一圈中至少部分部位能够旋转至所述限位引导部下方,以使所述限位引导部将所述细长医疗器械引导到所述驱动槽的每一圈内。
13、在其中一个实施例中,所述限位引导部与所述槽口边缘的距离小于所述细长医疗器械的直径。
14、在其中一个实施例中,所述限位引导部与所述槽口边缘的距离小于2.5mm。
15、一种手术机器人,包括上述任意一项中的输送装置。
16、有益效果:本申请中的输送装置,通过输送转盘的正反转,实现驱动细长医疗器械前进和后退。细长医疗器械后退并回收进入输送转盘的驱动槽内。通过限位引导件能与输送转盘相对运动,从而对细长医疗器械进行导向,将细长医疗器械依次导向至驱动槽的不同位置,从而防止输送转盘回收细长医疗器械时,细长医疗器械堆积在驱动槽的某个部位。
技术特征:
1.一种输送装置,其特征在于,包括:
2.根据权利要求1所述的输送装置,其特征在于,所述限位引导件包括设置于所述限位引导部上的第二引导面以及设置于所述限位引导部外的第一引导面,所述第一引导面用于将所述细长医疗器械引导至所述第二引导面,所述第二引导面用于将所述细长医疗器械引导至所述驱动槽内。
3.根据权利要求2所述的输送装置,其特征在于,所述第二引导面包括了与所述槽口的边缘的距离变化的部位;或
4.根据权利要求1所述的输送装置,其特征在于,所述限位引导件为盖子结构,所述限位引导件包括上盖板,所述上盖板覆盖所述输送转盘的上表面的至少部分区域,所述限位引导部设置于所述上盖板。
5.根据权利要求1所述的输送装置,其特征在于,所述输送装置还包括底座,所述输送转盘转动连接于所述底座,所述限位引导件固定连接于所述底座。
6.根据权利要求5所述的输送装置,其特征在于,所述限位引导件包括支撑件,所述支撑件连接所述底座和所述限位引导部,所述支撑件和所述限位引导部形成l形结构。
7.根据权利要求5所述的输送装置,其特征在于,所述输送转盘上设置有用于限制槽口宽度的限位件。
8.根据权利要求1所述的输送装置,其特征在于,所述驱动槽连续延伸形成多圈,所述输送转盘旋转使所述驱动槽的每一圈中至少部分部位能够旋转至所述限位引导部下方,以使所述限位引导部将所述细长医疗器械引导到所述驱动槽的每一圈内。
9.根据权利要求1所述的输送装置,其特征在于,所述限位引导部与所述槽口边缘的距离小于所述细长医疗器械的直径。
10.根据权利要求1所述的输送装置,其特征在于,所述限位引导部与所述槽口边缘的距离小于2.5mm。
11.一种手术机器人,其特征在于,包括权利要求1-10任意一项中的输送装置。
技术总结
本技术涉及一种输送装置及手术机器人,包括:输送转盘,所述输送转盘上开设有具有槽口的驱动槽,所述驱动槽用于收容细长医疗器械,所述输送转盘能够绕旋转轴线旋转以使所述细长医疗器械的部分经所述槽口进出所述驱动槽;以及限位引导件,所述限位引导件包括能与所述输送转盘相对运动的限位引导部,所述限位引导部覆盖至少部分所述槽口,所述限位引导部被配置为引导所述细长医疗器械进入所述驱动槽,并将所述细长医疗器械限位于所述驱动槽内。能够防止输送转盘回收细长医疗器械时,细长医疗器械堆积在驱动槽的某个部位。
技术研发人员:赵柏湖,梁良军,程舒宇,王永胜
受保护的技术使用者:杭州德诺脑神经医疗科技有限公司
技术研发日:20230110
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!