介入手术机器人主端操作手柄模块的制作方法
本技术涉及到医疗器械机器人,尤其涉及一种介入手术机器人主端操作手柄模块。
背景技术:
1、介入手术机器人包括主端操作器和从端装置,主端操作器基于操作者操作动作形成相应的控制指令并发送从端装置,从端装置根据控制指令自动将柔性医疗器械递送进入血管,完成血管介入手术。目前主端操作器的控制结构有触摸屏和操作手柄等。操作手柄可以对手术机器人发布操作命令,例如导丝的进退、转动等。中国专利cn202111009835.x一种介入手术机器人主端操作手柄,该主端操作手柄的旋转编码器的码盘装设于操作杆上并随操作杆同步转动,旋转编码器的读数头装设在码盘的上方,受上述设计结构的影响,主端操作器成型后,主端操作器的整体高度较高,给医生的操作带来不便。
技术实现思路
1、本实用新型的主要目的为提供一种介入手术机器人主端操作手柄模块,旨在解决现有技术中的主端操作器的整体高度较高,给医生的操作带来不便的技术问题。
2、本实用新型提出以下技术方案:
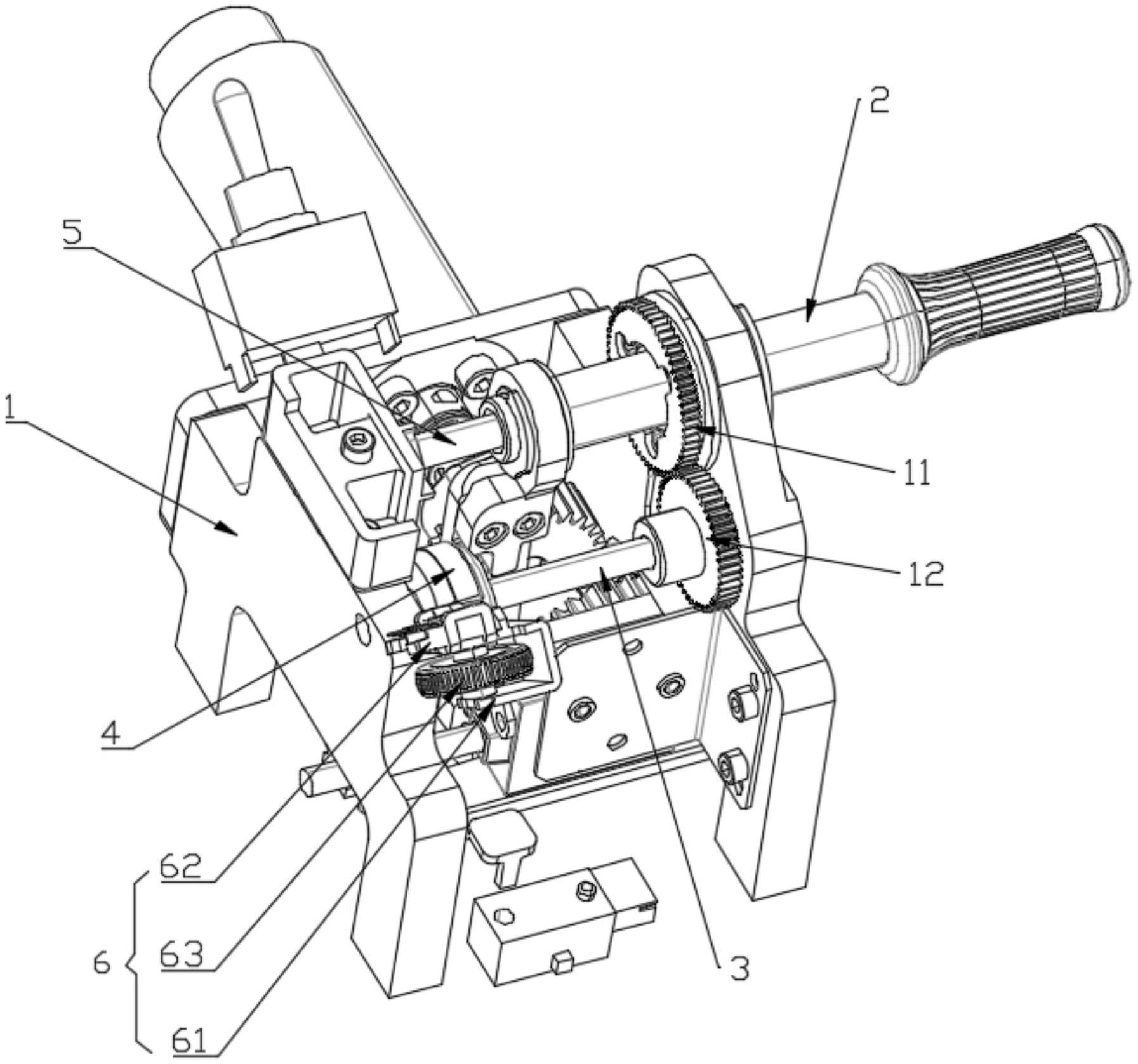
3、一种介入手术机器人主端操作手柄模块,包括:机架、操作杆、传动轴以及角度检测装置;
4、所述传动轴以及所述角度检测装置均与所述操作杆不同轴设置;
5、所述传动轴的一端与所述操作杆传动连接,另一端与所述角度检测装置连接,其中,所述角度检测装置通过检测所述传动轴的转动信息来获取所述操作杆的转动角度。
6、进一步地,所述机架上可转动地装设有第一齿轮,所述第一齿轮套设于所述操作杆且在旋转方向上相对固定;所述传动轴套设有第二齿轮,所述第一齿轮和所述第二齿轮啮合,以使所述操作杆与所述传动轴传动连接。
7、进一步地,所述角度检测装置包括旋转编码器和编码盘,所述旋转编码器设置在所述机架上,所述编码盘设置在所述传动轴的一端,所述旋转编码器与所述编码盘感应配合以检测所述传动轴的转动信息。
8、进一步地,所述旋转编码器为空心编码器,所述编码盘设置在所述传动轴延伸进入所述空心编码器的一端上。
9、进一步地,所述操作杆上设置有第一限位结构,所述第一齿轮上设置有第二限位结构,所述第一限位结构与所述第二限位结构相互配合以实现所述操作杆与所述第一齿轮在旋转方向上相对固定。
10、进一步地,所述第一限位结构为开设于所述操作杆上的条形槽,所述条形槽的延伸方向与所述操作杆的中心轴线方向相平行,所述第二限位结构为设置在所述第一齿轮上的滑动螺钉,所述滑动螺钉卡接进入所述条形槽内。
11、进一步地,所述操作杆与所述传动轴的中心轴线相互平行且所述操作杆的中心轴线在所述机架上所处的高度高于所述传动轴的中心轴线所处的高度。
12、进一步地,所述主端操作手柄模块还包括设置在所述机架上的导轴,所述导轴穿设于所述操作杆内且通过轴承与所述操作杆转动连接。
13、进一步地,所述主端操作手柄模块还包括滚轮组件,所述操作杆用于控制第一细长型医疗器械,所述滚轮组件用于控制第二细长型医疗器械相对于所述第一细长型医疗器械运动。
14、进一步地,所述滚轮组件包括安装架、滚轮编码器以及滚轮,所述滚轮编码器和所述滚轮均设置在所述安装架上,所述滚轮编码器用于获取所述滚轮的转动信息。
15、本实用新型提供的一种介入手术机器人主端操作手柄模块,包括:机架、操作杆、传动轴以及角度检测装置;传动轴以及角度检测装置均与所述操作杆不同轴设置;传动轴的一端与操作杆传动连接,另一端与角度检测装置连接,其中,角度检测装置通过检测传动轴的转动信息来获取操作杆的转动角度,由于本申请中的传动轴以及角度检测装置均与操作杆不同轴设置,因此可以适应性地调整传动轴以及角度检测装置与操作杆的相对位置,使得主端操作器成型后,主端操作器的整体高度降低,提高医生的操作的便利性。
技术特征:
1.一种介入手术机器人主端操作手柄模块,其特征在于,包括:机架、操作杆、传动轴以及角度检测装置;
2.根据权利要求1所述的介入手术机器人主端操作手柄模块,其特征在于,所述机架上可转动地装设有第一齿轮,所述第一齿轮套设于所述操作杆且在旋转方向上相对固定;所述传动轴套设有第二齿轮,所述第一齿轮和所述第二齿轮啮合,以使所述操作杆与所述传动轴传动连接。
3.根据权利要求2所述的介入手术机器人主端操作手柄模块,其特征在于,所述角度检测装置包括旋转编码器和编码盘,所述旋转编码器设置在所述机架上,所述编码盘设置在所述传动轴的一端,所述旋转编码器与所述编码盘感应配合以检测所述传动轴的转动信息。
4.根据权利要求3所述的介入手术机器人主端操作手柄模块,其特征在于,所述旋转编码器为空心编码器,所述编码盘设置在所述传动轴延伸进入所述空心编码器的一端上。
5.根据权利要求2所述的介入手术机器人主端操作手柄模块,其特征在于,所述操作杆上设置有第一限位结构,所述第一齿轮上设置有第二限位结构,所述第一限位结构与所述第二限位结构相互配合以实现所述操作杆与所述第一齿轮在旋转方向上相对固定。
6.根据权利要求5所述的介入手术机器人主端操作手柄模块,其特征在于,所述第一限位结构为开设于所述操作杆上的条形槽,所述条形槽的延伸方向与所述操作杆的中心轴线方向相平行,所述第二限位结构为设置在所述第一齿轮上的滑动螺钉,所述滑动螺钉卡接进入所述条形槽内。
7.根据权利要求1所述的介入手术机器人主端操作手柄模块,其特征在于,所述操作杆与所述传动轴的中心轴线相互平行且所述操作杆的中心轴线在所述机架上所处的高度高于所述传动轴的中心轴线所处的高度。
8.根据权利要求1所述的介入手术机器人主端操作手柄模块,其特征在于,所述主端操作手柄模块还包括设置在所述机架上的导轴,所述导轴穿设于所述操作杆内且通过轴承与所述操作杆转动连接。
9.根据权利要求1所述的介入手术机器人主端操作手柄模块,其特征在于,所述主端操作手柄模块还包括滚轮组件,所述操作杆用于控制第一细长型医疗器械,所述滚轮组件用于控制第二细长型医疗器械相对于所述第一细长型医疗器械运动。
10.根据权利要求9所述的介入手术机器人主端操作手柄模块,其特征在于,所述滚轮组件包括安装架、滚轮编码器以及滚轮,所述滚轮编码器和所述滚轮均设置在所述安装架上,所述滚轮编码器用于获取所述滚轮的转动信息。
技术总结
本技术涉及到医疗器械机器人技术领域,尤其涉及一种介入手术机器人主端操作手柄模块,包括:机架、操作杆、传动轴以及角度检测装置;传动轴以及角度检测装置均与所述操作杆不同轴设置;传动轴的一端与操作杆传动连接,另一端与角度检测装置连接,其中,角度检测装置通过检测传动轴的转动信息来获取操作杆的转动角度,由于本申请中的传动轴以及角度检测装置均与操作杆不同轴设置,因此可以适应性地调整传动轴以及角度检测装置与操作杆的相对位置,使得主端操作器成型后,主端操作器的整体高度降低,提高医生的操作的便利性。
技术研发人员:李正龙
受保护的技术使用者:深圳市爱博医疗机器人有限公司
技术研发日:20230214
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!