一种用于多通道植入的对接运动平台的制作方法
本技术属于医疗器械,尤其是涉及在放射源植入手术中使用的一种用于多通道植入的对接运动平台。
背景技术:
1、放射性粒子植入术是指将同位素放射源直接植入肿瘤区域进行治疗的技术,属于放射治疗的一种。目前该技术手段主要是利用现代影像学技术(ct、超声等),先将同轴穿刺针穿刺到肿瘤靶体内或肿瘤周围,然后拔出同轴穿刺针中的针芯,形成中空通道,然后再用推杆将放射性粒子通过穿刺针的中空通道推入到肿瘤靶体内或肿瘤周围,通过放射性粒子持续释放射线对肿瘤细胞进行杀伤,植入的粒子通常是碘125粒子,碘125粒子半衰期为59.6天、人体内辐射半径不到1.7厘米,安全且易防护,粒子释放的γ射线持续180天有效照射肿瘤细胞,具有靶区肿瘤高剂量分布以杀伤肿瘤细胞,而周围正常组织接受微量辐射,不造成损伤或仅有微小损伤的特性,本质上就是一种精确放疗手段。
2、公开号为cn1069415a、cn1069063c、cn1190602a、cn1322578a和cn2235827y等专利文献公开了一种适应人体内多种肿瘤的治疗方法及装置,在治疗前先将多个连接有导管的穿刺针插入人体内肿瘤部位,将放射源固定在钢丝绳的末端,通过通道切换装置将钢丝绳从不同的导管送入肿瘤部位进行放疗,治疗完成后,再将钢丝绳及放射源收走。这类近距离放疗手术,所用的穿刺针的尖端是密封的(而粒子植入手术中的穿刺针是开放的),将放射源驱动到肿瘤位置(放射源不植入体内)透过穿刺针发射射线对肿瘤进行放疗,这种放射源的放射性比粒子植入手术用的i125粒子强很多,只需要停留几分钟就可以达到放射治疗效果。但是,这种手术相比于粒子植入的手术治疗时间更短,无法长时间抑制肿瘤生长,因此在一些部位的癌症治疗效果上不如粒子植入手术。但是现有的粒子植入手术又必须人工参与进行拔针(调整粒子植入的深度),导致医生被辐射的问题。同时,这种设备由于放射源不需要和患者创口接触(被穿刺针密封隔离),放射源的驱动机构的消毒要求要低得多,而粒子植入手术,放射性粒子是直接和生物体组织接触且长时间留置体内的,就需要克服消毒与隔离上的各种问题。由于粒子与推杆是分离的,因此还必须要严格保证输送通道的封闭性,否则粒子就会卡在缝隙中。另外,粒子植入手术还需要解决拔针的问题。因此,需要针对粒子植入的这些技术难点设计专用的粒子自动植入机。
技术实现思路
1、为了解决上述的技术问题,本实用新型的目的是提供一种用于多通道植入的对接运动平台,通过平面位移机构驱动第一前后对接机构或第二前后对接机构在一个平面内运动,第一前后对接机构驱动第一连接部或第一装夹部在垂直于该平面的方向上前后运动,第一连接部上连接有连接件,所述连接件上设有多个输送导管,使安装在第一装夹部上的推杆输出通道的一端与不同输送导管连通,并将放射性粒子或粒子链从不同输送导管植入生物体组织内,从而实现多通道植入;同时第一装夹部上的驱动动力源能够驱动拔针驱动机构动作,第二前后对接机构驱动第三装夹部在垂直于该平面的方向上前后运动,第三装夹部上的驱动动力源能够驱动拔芯机构动作,使拔针驱动机构或拔芯机构能够分别与连接件上不同的输送导管实现对接,从而实现多通道拔芯和拔针。
2、为了达到上述的目的,本实用新型采用了以下的技术方案:
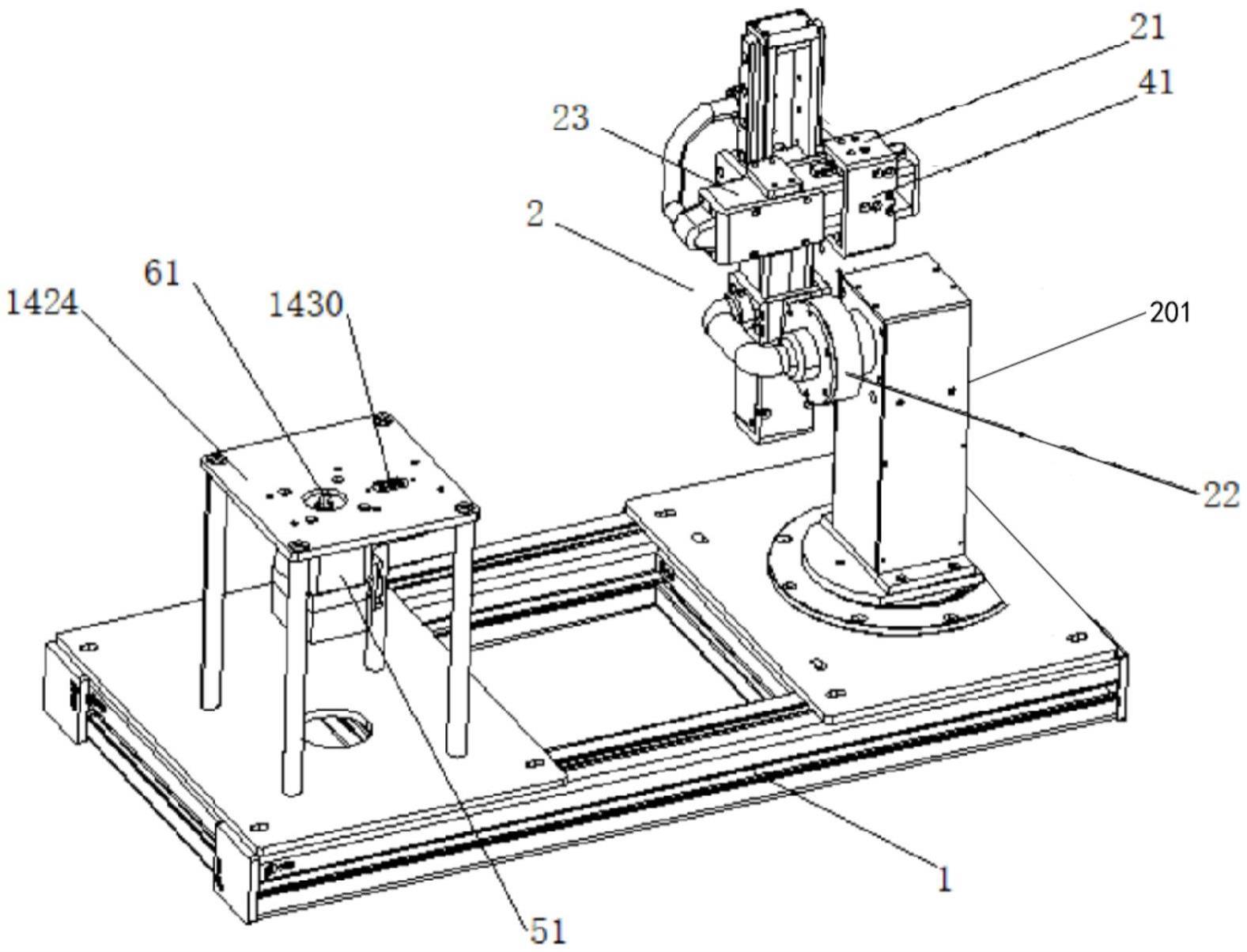
3、一种用于多通道植入的对接运动平台,包括运动平台和底座,所述运动平台设置在底座上,所述运动平台的一侧设有第一连接部,所述运动平台的另一侧设有第一装夹部,所述运动平台用于驱动第一连接部或/和第一装夹部运动,从而改变二者在空间中的相对位置,所述运动平台包括平面位移机构和第一前后对接机构,所述第一前后对接机构与平面位移机构连接,所述平面位移机构用于驱动所述第一装夹部在一个平面内运动,所述第一前后对接机构驱动所述第一连接部或第一装夹部在垂直于该平面的方向上前后运动。
4、作为优选,所述平面位移机构的一侧设有第一连接部,所述第一连接部上连接有连接件,所述连接件上分布有多个连接孔,所述平面位移机构的活动端固定有第一前后对接机构,所述平面位移机构用于驱动所述第一前后对接机构在一个平面内运动,所述第一前后对接机构驱动所述第一装夹部在垂直于该平面的方向上前后运动,推杆输出通道的一端设置在第一装夹部上,所述运动平台用于实现所述推杆输出通道的一端和连接件在空间中的相对运动,使所述推杆输出通道与连接件上的任一连接孔对接,从而实现多通道植入,所述第一连接部为粘胶连接部、焊接连接部、螺纹连接部、铆接连接部、卡扣连接部、锁扣连接部中的一种或多种组合。
5、作为优选,所述平面位移机构为单关节旋转运动机构、单关节旋转运动机构结合径向直线运动机构、双关节旋转运动机构或xy轴直线运动机构的一种,所述第一前后对接机构设置在所述平面位移机构的活动端。
6、当所述平面位移机构为单关节旋转运动机构结合径向直线运动机构时,所述平面位移机构还包括旋转臂,所述单关节旋转运动机构驱动旋转臂在一个平面内旋转,所述径向直线运动机构设置在旋转臂上,并驱动设置在旋转臂上的滑块沿着旋转臂径向运动,所述第一前后对接机构设置在滑块的侧面。
7、作为优选,所述第一装夹部和/或第一连接部上设有快速连接结构,所述快速连接结构为螺纹结构、卡扣结构、锁紧结构的一种或组合;所述第一装夹部和/或第一连接部上还设有定位结构,所述定位结构为定位销、定位孔、定位台阶、定位球的一种或组合。
8、作为优选,还设有浮动连接机构,所述浮动连接机构是设置在第一装夹部和运动平台之间、或者运动平台内部、或者运动平台和第一连接部之间的引导元件与弹性元件,所述引导元件可以引导连接在浮动连接机构两端的两部分之间做一定形式的相对运动,所述弹性元件在不受外力的情况下可以限制连接在浮动连接机构两端的两部分保持在初始位置上,而在受到外力的情况下可以发生形变从而使二者发生相对运动,在外力撤销后,所述弹性元件在自身弹性作用下将连接在浮动连接机构两端的两部分复位,实现浮动连接。
9、所述引导元件是球铰、铰链、滑槽、导轨、滑动平面中的一种或组合;所述弹性元件为弹性圈、弹性块、弹簧、弹片、扭簧、卷簧的一种或组合。
10、作为优选,所述浮动连接机构设置在第一装夹部与前后运动模块之间,或者在所述前后运动模块与平面位移机构之间,或者在所述平面位移机构与第一连接部之间,所述浮动连接机构能够在第一装夹部受外力时,使第一装夹部相对于运动平台之间、或者运动平台内部、或者运动平台相对于第一连接部之间产生相对活动,从而在对接时在对中锥面的导向下自动对中,消除运动平台的定位误差,且在外力撤销后,能够自动复位。
11、作为优选,还包括第二前后对接机构与第三装夹部,所述第三装夹部设置在第二前后对接机构的一端或所述平面运动机构的活动端,所述平面运动机构同时驱动第一装夹部与第三装夹部在一个平面内运动,所述第二前后对接机构驱动所述第一连接部或第三装夹部在垂直于该平面的方向上前后运动,所述第二前后对接机构与第一前后对接机构并排设置在平面运动机构的活动端。
12、作为优选,当所述平面位移机构为单关节旋转运动机构结合径向直线运动机构时,所述平面位移机构还包括旋转臂,所述单关节旋转运动机构驱动旋转臂在一个平面内旋转,所述径向直线运动机构设置在旋转臂上,并驱动设置在旋转臂上的滑块沿着旋转臂径向运动,所述第一前后对接机构与第二前后对接机构分别设置在滑块的两侧。
13、作为优选,所述第一装夹部上还设有第一旋转动力源和第一动力轴,所述第一旋转动力源能够驱动第一动力轴旋转,所述第一旋转动力源能够通过第一动力轴驱动推杆驱动机构或粒子链驱动机构动作;所述第一装夹部上还设有第二旋转动力源和第二动力轴,所述第二旋转动力源能够驱动第二动力轴旋转,所述第二旋转动力源能够通过第二动力轴驱动拔针驱动机构动作;所述第一装夹部上还设有第五旋转动力源和第五动力轴,所述第五旋转动力源能够驱动第五动力轴旋转,所述第五旋转动力源能够通过第五动力轴驱动切断机构动作;所述第一动力轴或第二动力轴或第五动力轴采用传动轴结构或传动孔结构,所述传动轴结构为一字形轴、十字形轴、方轴、六角轴、多边形轴、d形轴、扁轴、花键轴、不规则形轴中的一种,所述传动孔结构为一字形孔、十字形孔、方孔、六角孔、多边形孔、d形孔、扁孔、花键孔、不规则形孔中的一种。
14、所述第一装夹部还设置有第一导电触点,该第一导电触点通过相互接触或连接的方式形成对外部电子元器件的供电和/或信号传递。
15、作为优选,所述第三装夹部上还设有第三旋转动力源和第三动力轴,所述第三旋转动力源能够驱动第三动力轴旋转,所述第三旋转动力源能够通过第三动力轴驱动拔芯机构动作;所述第三动力轴采用传动轴结构或传动孔结构,所述传动轴结构为一字形轴、十字形轴、方轴、六角轴、多边形轴、d形轴、扁轴、花键轴、不规则形轴中的一种,所述传动孔结构为一字形孔、十字形孔、方孔、六角孔、多边形孔、d形孔、扁孔、花键孔、不规则形孔中的一种。
16、所述第三装夹部还设置有第三导电触点,该第三导电触点通过相互接触或连接的方式形成对外部电子元器件的供电和/或信号传递。
17、有益效果:
18、本实用新型能够实现多通道植入,通过运动平台的一侧设有连接件,连接件上设有多个连接孔,运动平台的另一侧设有第一装夹部,运动平台的第一前后对接机构与平面位移机构连接,平面位移机构用于驱动第一前后对接机构在一个平面内运动,第一前后对接机构驱动连接件或第一装夹部或连接件在垂直于该平面的方向上前后运动,从而将安装在第一装夹部的推杆输出通道与连接件上任意一个连接孔对接,再将粒子或粒子链从推杆输出通道和这个连接孔输出出去,实现多通道植入。由于有前后对接机构,可以确保通道的封闭连续,避免粒子或粒子链卡在缝隙里,结构简单合理、驱动方便快捷,能够实现全自动操作,避免辐射风险,减少手术时间,降低手术成本。
- 还没有人留言评论。精彩留言会获得点赞!