一种辅助于腔镜手术机器人系统的多自由度手术器械的制作方法
本技术涉及医疗器械,尤其涉及一种辅助于腔镜手术机器人系统的多自由度手术器械。
背景技术:
1、微创手术是一种利用腹腔镜、胸腔镜等现代医疗器械,并结合相关手术器械完成的手术。尽管手术机器人具有诸多优点,但由于手术机器人同时具有体积大、售价高等缺陷,目前仍有很多医生选择常规的手持手术器械。常规的手持手术器械在末端执行器和手持端之间设置有连接管,末端执行器和连接管之间能够实现相对转动以调整末端执行器的操作角度。但是,这种常规的手持手术器械在手术过程中需要操作者频繁操作开关对末端执行器的开合状态进行锁止和解锁,造成使用不便,容易造成操作者操作疲劳,进而影响手术效率和手术成功率。
技术实现思路
1、本实用新型的目的在于提供一种辅助于腔镜手术机器人系统的多自由度手术器械,能够对执行器的初始状态和执行状态进行锁定和解锁,使用方便,减轻操作者疲劳,提高手术效率和手术成功率。
2、为达此目的,本实用新型采用以下技术方案:
3、提供一种辅助于腔镜手术机器人系统的多自由度手术器械,包括:
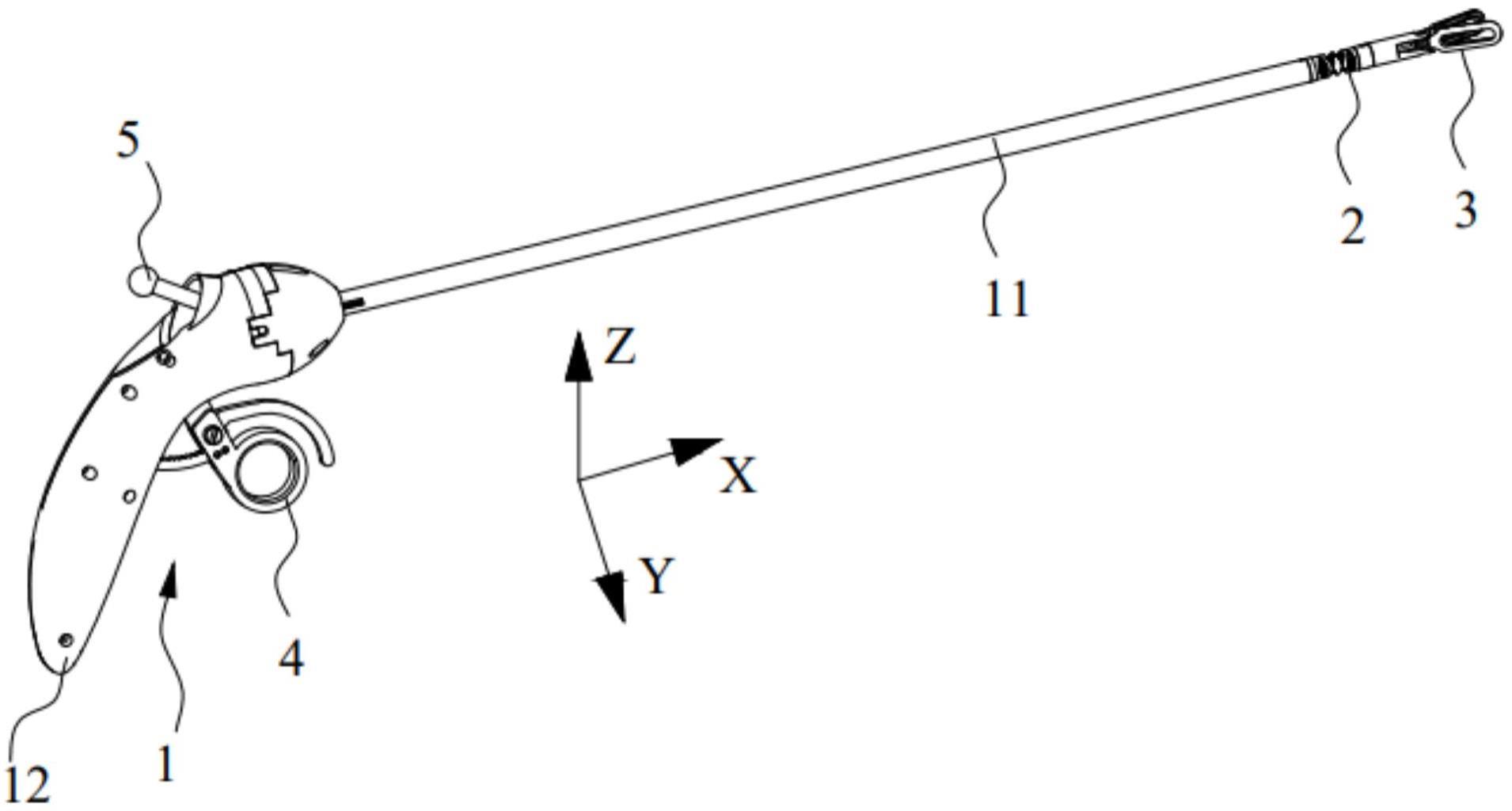
4、壳体组件,所述壳体组件包括相互连接的基体和操作手柄,所述基体沿第一方向延伸;
5、蛇骨组件,所述蛇骨组件连接于所述基体的远端,所述蛇骨组件能够弯曲且绕第二方向偏摆,和/或绕第三方向偏摆,所述第一方向、所述第二方向和所述第三方向两两互相垂直;
6、执行组件,所述执行组件包括执行器和第一操作线,所述执行器连接于所述蛇骨组件的远端,所述执行器具有初始状态和执行状态,所述第一操作线沿所述第一方向延伸且远端连接于所述执行器,所述第一操作线能够沿所述第一方向往复滑动以使所述执行器在所述初始状态和所述执行状态之间转换;
7、锁定组件,所述锁定组件包括棘轮机构和解锁机构,所述棘轮机构包括相互啮合的棘轮和棘爪,所述棘轮连接所述第一操作线的近端,所述棘轮可转动地连接所述操作手柄以使所述第一操作线滑动,所述棘轮机构能够锁定所述第一操作线,所述解锁机构连接于所述棘轮机构的棘爪,并驱动所述棘爪转动,所述棘爪能够脱离所述棘轮以使所述第一操作线沿所述第一方向滑动。
8、作为本实用新型的一种优选结构,所述棘轮机构还包括操作扳机,所述操作扳机的一端连接所述棘轮,另一端连接所述第一操作线的近端,所述操作扳机转动连接于所述操作手柄,所述操作扳机的转动圆心和所述棘轮的转动圆心相同,所述操作扳机能够转动所述棘轮且拉动所述第一操作线沿所述第一方向滑动。
9、作为本实用新型的一种优选结构,所述解锁机构包括解锁扳机和第二操作线,所述第二操作线的一端连接所述棘爪,另一端连接所述解锁扳机,所述解锁扳机转动连接于所述棘轮机构,所述解锁扳机能够通过所述第二操作线拉动所述棘爪远离所述棘轮以解锁所述第一操作线。
10、作为本实用新型的一种优选结构,所述棘轮机构还包括操作扳机复位扭簧,所述操作扳机复位扭簧的一端固定连接于所述操作手柄,另一端连接所述操作扳机,所述操作扳机复位扭簧始终具有推动所述操作扳机反向转动的趋势。
11、作为本实用新型的一种优选结构,所述棘轮机构还包括棘爪复位弹簧,所述棘爪复位弹簧的一端固定连接于所述操作手柄,另一端连接所述棘爪,所述棘爪复位弹簧始终具有推动所述棘爪啮合所述棘轮的趋势。
12、作为本实用新型的一种优选结构,所述多自由度手术器械还包括操作组件,所述操作组件包括至少四根第三操作线,所述第三操作线沿所述第一方向延伸,所述第三操作线的远端连接于所述蛇骨组件,至少四根所述第三操作线能够张紧或者放松以使所述蛇骨组件弯曲且绕所述第二方向偏摆,和/或绕所述第三方向偏摆。
13、作为本实用新型的一种优选结构,所述操作组件还包括操作杆机构,所述操作杆机构转动连接于所述操作手柄,所述操作杆机构固定连接于所述第三操作线的近端,所述操作杆机构能够绕所述第一方向转动,以使至少一根所述第三操作线放松,且使其余所述第三操作线张紧。
14、作为本实用新型的一种优选结构,所述操作杆机构包括:
15、支撑框,所述支撑框转动连接于所述操作手柄,且设置于所述操作手柄内,所述支撑框能够绕所述第二方向转动;
16、固定板,所述第三操作线的近端固定连接于所述固定板,所述固定板转动连接于所述支撑框,所述固定板的转轴垂直于所述支撑框的转轴;
17、操作杆,所述操作杆垂直连接于所述固定板,且一端延伸至所述操作手柄外。
18、作为本实用新型的一种优选结构,所述蛇骨组件包括从近端至远端依次转动连接的首端蛇骨、至少一个关节蛇骨和末端蛇骨,所述首端蛇骨固定连接于所述基体的远离,所述关节蛇骨可转动地设置于所述首端蛇骨和所述末端蛇骨之间,所述首端蛇骨、所述关节蛇骨和所述末端蛇骨上均设置有多个引导孔,多根所述第三操作线分别穿过多个所述引导孔,且所述第三操作线的远端固定于所述末端蛇骨或者所述关节蛇骨上。
19、作为本实用新型的一种优选结构,所述执行器包括:
20、套筒,所述套筒固定连接于所述蛇骨组件的远端;
21、至少两个夹爪,所述夹爪铰接于所述套筒,至少两个所述夹爪的远端能够相互靠近或者远离,所述夹爪的近端设置有滑槽,所述滑槽的延伸方向和所述第一方向具有夹角;
22、夹爪座,所述夹爪座可滑动地设置于所述套筒内,所述夹爪座的近端固定连接于所述第一操作线,所述夹爪座的远端设置有滑杆,所述滑杆滑动连接于所述滑槽,所述滑杆沿所述滑槽滑动以使至少两个所述夹爪的远端相互靠近或者远离。
23、本实用新型的有益效果:
24、本实用新型所提供的辅助于腔镜手术机器人系统的多自由度手术器械,蛇骨组件为柔性结构,在手术过程中能够进行多种角度调整,实现万向转动,防止执行器被内窥镜等其他同时进行的工作器械遮挡,避免工作范围受限,提高手术成功率;第一操作线能够沿第一方向往复滑动以使执行器在初始状态和执行状态之间转换;根据棘轮机构的棘轮和棘爪的啮合特性,棘轮机构能够锁定第一操作线,进而实现对执行器的状态锁定;解锁机构连接于棘轮机构的棘爪,并驱动棘爪转动,棘爪能够脱离棘轮,棘轮可以反向转动,以使第一操作线沿第一方向反向滑动。棘轮机构和解锁机构重复上述的锁定和解锁操作,可以实现执行器的功能切换和锁定,可以长时间保持初始状态或者执行状态而不需要操作者进行手动操作,使远端的执行器在任意位置的开合状态的锁定更为可靠,避免频繁操作开关对执行器进行锁止和解锁,减轻操作者疲劳,提高手术效率和手术成功率。手术器械体积小巧,能够供操作者手持操作,方便切换手术场地,无需电器连接或者充电等问题,随时可进行手术操作;且生产成本低,进而降低手术成本。
技术特征:
1.一种辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,包括:
2.根据权利要求1所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述棘轮机构(41)还包括操作扳机(413),所述操作扳机(413)的一端连接所述棘轮(411),另一端连接所述第一操作线(32)的近端,所述操作扳机(413)转动连接于所述操作手柄(12),所述操作扳机(413)的转动圆心和所述棘轮(411)的转动圆心相同,所述操作扳机(413)能够转动所述棘轮(411)且拉动所述第一操作线(32)沿所述第一方向滑动。
3.根据权利要求2所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述解锁机构(42)包括解锁扳机(421)和第二操作线(422),所述第二操作线(422)的一端连接所述棘爪(412),另一端连接所述解锁扳机(421),所述解锁扳机(421)转动连接于所述棘轮机构(41),所述解锁扳机(421)能够通过所述第二操作线(422)拉动所述棘爪(412)远离所述棘轮(411)以解锁所述第一操作线(32)。
4.根据权利要求2所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述棘轮机构(41)还包括操作扳机复位扭簧(43),所述操作扳机复位扭簧(43)的一端固定连接于所述操作手柄(12),另一端连接所述操作扳机(413),所述操作扳机复位扭簧(43)始终具有推动所述操作扳机(413)反向转动的趋势。
5.根据权利要求2所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述棘轮机构(41)还包括棘爪复位弹簧(414),所述棘爪复位弹簧(414)的一端固定连接于所述操作手柄(12),另一端连接所述棘爪(412),所述棘爪复位弹簧(414)始终具有推动所述棘爪(412)啮合所述棘轮(411)的趋势。
6.根据权利要求1所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述多自由度手术器械还包括操作组件(5),所述操作组件(5)包括至少四根第三操作线(51),所述第三操作线(51)沿所述第一方向延伸,所述第三操作线(51)的远端连接于所述蛇骨组件(2),至少四根所述第三操作线(51)能够张紧或者放松以使所述蛇骨组件(2)弯曲且绕所述第二方向偏摆,和/或绕所述第三方向偏摆。
7.根据权利要求6所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述操作组件(5)还包括操作杆机构(52),所述操作杆机构(52)转动连接于所述操作手柄(12),所述操作杆机构(52)固定连接于所述第三操作线(51)的近端,所述操作杆机构(52)能够绕所述第一方向转动,以使至少一根所述第三操作线(51)放松,且使其余所述第三操作线(51)张紧。
8.根据权利要求7所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述操作杆机构(52)包括:
9.根据权利要求6所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述蛇骨组件(2)包括从近端至远端依次转动连接的首端蛇骨(21)、至少一个关节蛇骨(22)和末端蛇骨(23),所述首端蛇骨(21)固定连接于所述基体(11)的远离,所述关节蛇骨(22)可转动地设置于所述首端蛇骨(21)和所述末端蛇骨(23)之间,所述首端蛇骨(21)、所述关节蛇骨(22)和所述末端蛇骨(23)上均设置有多个引导孔(20),多根所述第三操作线(51)分别穿过多个所述引导孔(20),且所述第三操作线(51)的远端固定于所述末端蛇骨(23)或者所述关节蛇骨(22)上。
10.根据权利要求1-9任一项所述的辅助于腔镜手术机器人系统的多自由度手术器械,其特征在于,所述执行器(31)包括:
技术总结
本技术属于医疗器械技术领域,公开一种辅助于腔镜手术机器人系统的多自由度手术器械,包括壳体组件、蛇骨组件、执行组件和锁定组件;壳体组件包括沿第一方向延伸的基体和操作手柄;蛇骨组件连接基体远端,蛇骨组件能弯曲且绕第二方向偏摆,和/或绕第三方向偏摆;执行组件的执行器具有初始状态和执行状态,第一操作线能沿第一方向往复滑动以使执行器在初始状态和执行状态之间转换;棘轮机构的棘轮可转动地连接操作手柄以使第一操作线滑动,棘轮机构能锁定第一操作线,解锁机构驱动棘爪转动脱离棘轮以解锁第一操作线。本技术的多自由度手术器械能对执行器的执行状态锁定和解锁,使用方便,减轻操作者疲劳,提高手术效率。
技术研发人员:郗洪庆,薛人峰,雷春翠,刘怡,濮雪年
受保护的技术使用者:苏州欧畅医疗科技有限公司
技术研发日:20230316
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!