血管介入机器人专用可调弯导管的制作方法
本技术涉及医疗器械的领域,尤其涉及血管介入机器人专用可调弯导管。
背景技术:
1、心血管疾病是威胁居民健康的一大杀手,随着生活水平的提高和城市化进程的推进,心血管疾病的发病率不断上升。目前治疗心血管疾病的手段之一是采用导管、导丝递送置入物来疏通血管。传统的微创血管手术主要通过技术熟练的医生在x射线影像或其他灰度图像的监控和引导下,利用手工完成导管、导丝、微导管和气囊等手术器械的插入工作,再操纵介入器械在人体血管内运动,最终准确到达病灶并进行治疗。
2、但是,由于人体内血管存在弯曲狭长、不规则、分支多等特征,因此导丝在人体血管内的运动过程中,导丝的头部需要进行一定程度上的水平左右摆动,这样导丝才能进入不同分支的血管。同时,由于血管的分支并不一定在水平方向上,因此导丝还需要一定程度上的沿自身轴线旋转,即通过旋转来调整导丝头部在血管内的角度,配合导丝头部的摆动才能使得导丝进入不同分支的血管,随后导管在导丝的引导下进入血管到达目标位置。在现在的手术过程中,一般由医护人员通过操作手柄来控制导丝在人体血管中的移动。
3、例如公开号为cn115068784a的中国专利“一种可调弯手柄”,其公开了一种可调弯手柄,包括导管管体,所述导管管体上套设有用于调节导管管体的手柄,所述导管管体贯穿手柄两端;三通阀,设置在所述手柄的一端,用于穿设导管管体;调弯机构,设置在手柄内,所述调弯机构与所述导管管体远离所述手柄的一端连接,所述调弯机构包括限位件,所述限位件套设在导管管体上,所述限位件上设有调弯拉丝,所述调弯拉丝一端连接在导管管体远离手柄的一端,另一端固定在限位件上;旋转机构,设置在所述手柄上,用于完成对导管管体的旋转。
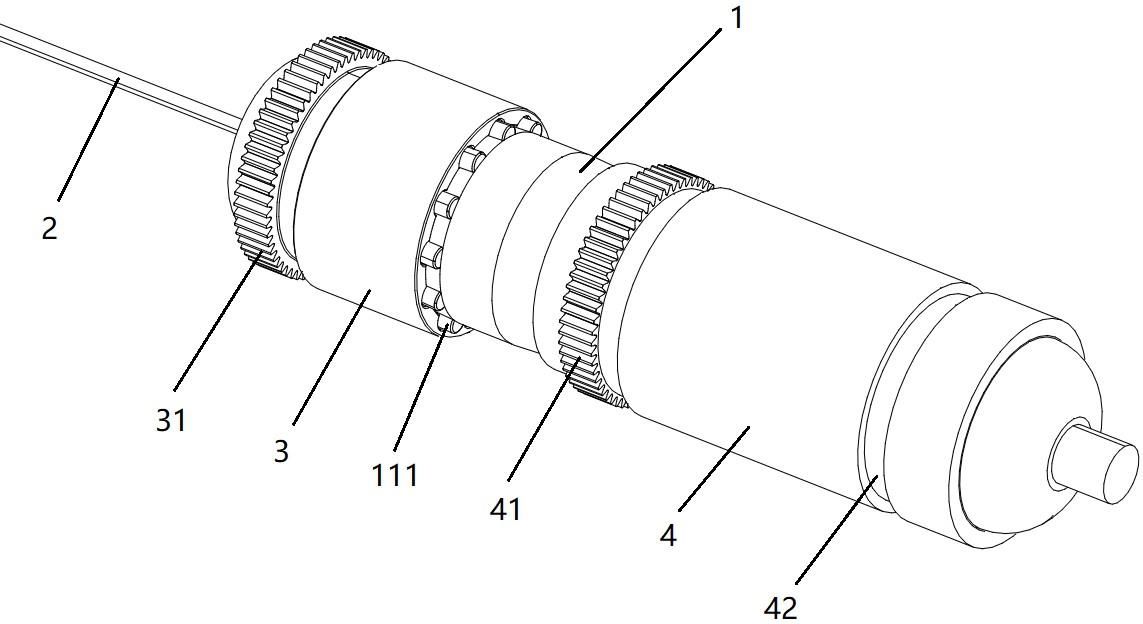
4、除上述的这种调弯手柄,市面上还有很多种类似的操纵手柄可对导丝的头部进行调控操作令其产生摆动或转动的动作。如附图1所示的一种可调弯导管手柄,包括第一控制部11和第二控制部12,导丝2安装于手柄的顶端,第一控制部11上还设置有便于人手拨动操作的旋转体111。通过转动第一控制部11即可操纵导丝2的头部左右摆动,而通过转动第二控制部12即可操纵导丝2整体的轴向旋转,从而使得导丝2的头部进入不同分支的血管。
5、在医护人员操作上述可调弯导管手柄1时,由于人手操作的局限性(易疲劳、操作精度低,存在较大的失误概率等等),并不能完全发挥出可调弯导管手柄1对导丝2的精确控制在手术中起到的优良效果。近些年来,随着机器人技术的发展,在微创血管介入手术领域,血管介入手术机器人也作为新兴产业得到迅速发展。利用外部机械来操作上述可调弯导管手柄1则有效解决了人手操作可调弯导管手柄1在手术过程中所带来的问题。
6、在利用外部机械来操作上述可调弯导管手柄1时,由于调弯手柄上的第一控制部11和第二控制部12均为人手操控设计,并不利于机械设备对可调弯导管手柄1的直接控制。因此,如何在保留可调弯导管手柄1原有结构的基础上使其更适合外部机械设备的直接操控成为本领域技术人员需要解决的问题。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供血管介入机器人专用可调弯导管,在保留可调弯导管手柄原有结构的基础上使得可调弯导管手柄上便于人手操控的第一控制部和第二控制部也便于机械设备的直接控制,充分发挥机械设备对可调弯导管手柄的精确控制在手术中起到的优良效果,具备结构简单易实施、工作可靠、适用性强等优点。
2、为达到上述目的,本实用新型的技术方案为:
3、血管介入机器人专用可调弯导管,包括第一控制部和第二控制部,还包括第一嵌套壳和第二嵌套壳,所述第一嵌套壳套设于第一控制部外围且与第一控制部同步转动,所述第二嵌套壳套设于第二控制部外围且与第二控制部同步转动,所述第一嵌套壳上设置有第一传动部,所述第二嵌套壳上设置有第二传动部,外部设备通过所述第一传动部驱动第一嵌套壳转动,且外部设备通过所述第二传动部驱动第二嵌套壳转动。
4、通过采用上述技术方案,外部机械设备通过第一传动部即可驱动第一嵌套壳转动,由于第一嵌套壳套设于可调弯导管手柄的第一控制部的外围并与第一控制部同步转动,因此外部机械设备在驱动第一嵌套壳转动的同时也即驱动第一控制部转动,从而达到控制导丝动作的目的。同理,外部机械设备通过第二传动部即可驱动第二嵌套壳转动,由于第二嵌套壳套设于可调弯导管手柄的第二控制部的外围并与第二控制部同步转动,因此外部机械设备在驱动第二嵌套壳转动的同时也即驱动第二控制部转动,从而达到控制导丝产生相应动作的目的。第一嵌套壳和第二嵌套壳将人手直接对第一控制部和第二控制部的转动操作转化为外部机械设备直接驱动第一传动部和第二传动部转动,直接利用市场上已有的医疗器械,从而达到了在保留可调弯导管手柄原有结构且节约成本的基础上实现由机器人控制的效果。
5、本实用新型进一步设置为:所述第一传动部为第一传动齿环,所述第一传动齿环位于第一嵌套壳的外侧且沿着第一嵌套壳的周向布置。
6、通过采用上述技术方案,外部机械设备与第一传动齿环的啮合并驱动第一传动齿环转动即可驱动第一嵌套壳沿自身轴线转动。同时,齿环与外部机械设备之间啮合的传动方式具有传动平稳、精确、不打滑的特点。采用第一传动齿环作为第一传动部有利于充分发挥机械设备对可调弯导管手柄的精确控制效果。
7、本实用新型进一步设置为:所述第二传动部为第二传动齿环,所述第二传动齿环位于第二嵌套壳的外侧且沿着第二嵌套壳的周向布置。
8、通过采用上述技术方案,外部机械设备与第二传动齿环的啮合并驱动第二传动齿环转动即可驱动第二嵌套壳沿自身轴线转动。同时,齿环与外部机械设备之间啮合的传动方式具有传动平稳、精确、不打滑的特点。采用第二传动齿环作为第二传动部有利于充分发挥机械设备对可调弯导管手柄的精确控制效果。
9、本实用新型进一步设置为:所述第一控制部外壁上周向均匀分布有若干旋转体,所述第一嵌套壳内壁上均匀分布有若干嵌槽,所述嵌槽的形状与旋转体相适配,且所述嵌槽的数量与旋转体的数量相同。
10、通过采用上述技术方案,第一嵌套壳内壁上的嵌槽可完全容纳包覆第一控制部上所有外凸的旋转体,从而达到了在不改变可调弯导管手柄上任何结构的前提下消除了第一嵌套壳与第一控制部之间间隙的效果,使得第一嵌套壳与第一控制部之间的连接更加紧密。
11、本实用新型进一步设置为:所述第二嵌套壳上设置有一个定位槽。
12、通过采用上述技术方案,定位槽的设置便于在可调弯导管手柄工作中对其进行轴向的限位,防止其产生轴向错位。
13、本实用新型进一步设置为:所述定位槽位于第二嵌套壳上远离第二传动部的一端。
14、通过采用上述技术方案,有效避免了与定位槽配合工作的限位机构与驱动第二嵌套壳的驱动机构的位置分布产生干涉。
15、本实用新型进一步设置为:所述第一传动齿环的齿顶圆直径不超过第一嵌套壳的外径。
16、通过采用上述技术方案,第一传动齿环的齿顶高度不超过第一嵌套壳的高度,从而减少了第一传动齿环与外界接触磨损的机会,从而延长了第一传动齿环的使用寿命。
17、本实用新型进一步设置为:所述第二传动齿环的齿顶圆直径不超过第二嵌套壳的外径。
18、通过采用上述技术方案,第二传动齿环的齿顶高度不超过第二嵌套壳的高度,从而减少了第二传动齿环与外界接触磨损的机会,从而延长了第二传动齿环的使用寿命。
19、综上所述,本实用新型实现的有益效果如下:
20、(1)第一嵌套壳和第二嵌套壳将人手直接对第一控制部和第二控制部的转动操作转化为外部机械设备直接驱动第一传动部和第二传动部转动,直接利用市场上已有的医疗器械,从而达到了在保留可调弯导管手柄原有结构且节约成本的基础上实现由机器人控制的效果;
21、(2)第一传动齿环和第二传动齿环与外部机械设备之间啮合的传动方式具有传动平稳、精确、不打滑的特点,有利于充分发挥机械设备对可调弯导管手柄的精确控制效果;
22、(3)第一嵌套壳内壁上的嵌槽完全容纳包覆第一控制部上所有外凸的旋转体,达到了在不改变可调弯导管手柄上任何结构的前提下消除了第一嵌套壳与第一控制部之间间隙的效果,使得第一嵌套壳与第一控制部之间的连接更加紧密。
- 还没有人留言评论。精彩留言会获得点赞!