一次性使用血管介入机器人专用导管旋转及调弯模块的制作方法
本技术涉及医疗设备,具体涉及一次性使用血管介入机器人专用导管旋转及调弯模块。
背景技术:
1、目前中国已逐步进入老龄化社会,同时伴随着全国城市化的发展,心脑血管疾病的危险性越发增加。伴随着心脑血管疾病发病率的升高,也同时使其有治疗手段血管介入手术的需求增加,相关研究也逐年增长。
2、近些年,随着机器人技术迅速发展。国内外已经有很多机构研发了用于辅助医生手术操作的手术机器人,这在临床上有很大的应用前景。在众多关于手术机器人的研究中,大多数研究只研究了导丝的旋转,但导管旋转机构与机器人主体连接,长时间的使用过程中,只更换导丝而不更换导管旋转机构,导管旋转机构易受到空气或者机器人主体的污染,并污染导丝,增加手术风险。
技术实现思路
1、针对现有技术存在的问题,本实用新型的目的在于提供一次性使用血管介入机器人专用导管旋转及调弯模块,以解决现有技术中导管旋转机构易受到空气或者机器人主体的污染,并污染导丝,增加手术风险的问题。
2、一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,包括水平设置的主架,主架上安装有旋转轮和调弯轮;主架上安装有连接机构和传动机构,连接机构用于与设置在机器人主体上的电磁铁磁性连接,传动机构用于与设置在机器人主体上的驱动电机的输出轴连接,并带动旋转轮和调弯轮转动;
3、主架上设置有用于连接传动机构的轴承;
4、主架上可拆卸连接有导管托架,所述导管托架用于安装手柄,手柄上安装有导管和导丝;所述调弯轮与手柄传动,并用于控制导管弯曲,所述旋转轮用于导管弯曲后位置的调整。
5、进一步,所述主架顶面转动连接有舱盖,所述舱盖底部设置有用于按压手柄的第一压轴与第二压轴。
6、进一步,所述主架一侧设置有第一磁条,所述舱盖一侧设置有第二磁条。
7、进一步,所述主架一侧设置有安装副,安装副上设置有导向块。
8、进一步,所述传动机构包括第一传动机构,所述第一传动机构包括水平设置的第一输入轴,所述第一输入轴转动安装在主架一侧,第一输入轴一端用于与驱动电机的输出轴连接,另一端连接有第一锥齿轮;第一锥齿轮与安装在竖向设置的第一传动轴顶端的第二锥齿轮进行传动;第一传动轴安装在主架上,底部套接有第一齿轮;第一齿轮与安装在竖向设置的第二传动轴底部的第二齿轮传动,第二传动轴安装在主架上,顶部安装有第三齿轮,第三齿轮用于与第四齿轮传动;第四齿轮安装在竖向设置的第三传动轴的顶部,第三传动轴安装在主架上,第三传动轴的底部安装有第三锥齿轮,第三锥齿轮用于与第四锥齿轮传动,第四锥齿轮安装在水平设置的第四传动轴上,第四传动轴安装在主架上,第四传动轴上安装有第一驱动轮,第一驱动轮用于与旋转轮摩擦传动。
9、进一步,所述连接机构包括第一连接机构,所述第一连接机构包括水平设置的第一连接轴;第一连接轴通过第一直线轴承安装在主架上;所述第一连接轴一端用于与电磁铁磁性连接,另一端铰接第一差速臂,第一差速臂远离第一连接轴的一端铰接有第一法兰,第一法兰设置在第一驱动轮两侧,与第四传动轴转动连接,并与主架底部通过弹簧连接。
10、进一步,所述传动机构还包括第二传动机构,所述第二传动机构包括水平设置的第二输入轴,所述第二输入轴安装在主架一侧;第二输入轴一端用于与驱动电机的输出轴连接,另一端连接有第五锥齿轮,第五锥齿轮用于与第六锥齿轮传动;第六锥齿轮安装在竖向设置的第五传动轴的顶部,第五传动轴安装在主架上,第五输入轴的底部安装有第五齿轮,第五齿轮用于与第六齿轮传动;第六齿轮安装在竖向设置的第六传动轴底部,第六传动轴安装在支架上,第六处闹闹的广州的顶部安装有第一带轮,第一带轮与第二带轮之间通过皮带传动;第二带轮安装在竖向设置的第七传动轴的顶部,第七传动轴安装在支架上,底部安装有第七锥齿轮,第七锥齿轮与第八锥齿轮传动;第八锥齿轮安装在横向设置的第八传动轴的一端,第八传动轴安装在主架上,主架上安装有第二驱动轮,第二驱动轮用于与导弯轮摩擦传动。
11、进一步,所述连接机构包括第二连接机构,所述第二连接机构包括水平设置的第二连接轴;第二连接轴通过第二直线轴承安装在主架上;所述第二连接轴一端用于与电磁铁磁性连接,另一端铰接第二差速臂,第二差速臂远离第二连接轴的一端铰接有第二法兰,第二法兰设置在第二驱动轮两侧,与第八传动轴转动连接,并与主架底部通过弹簧连接。
12、进一步,所述导管托架上设置有安装槽,安装槽底部与主架中部贯通,用于旋转轮和调弯轮部分露出并与所述手柄抵接。
13、进一步,所述手柄上设置有摩擦部,所述摩擦部用于与所述调弯轮配合使导管弯曲;所述手柄远离摩擦部的一端设置有用于插入导管一端的y形阀。
14、有益效果:电磁铁与连接机构为磁性连接,通过控制电磁铁是否通电可以快速安装整个装置,使装置成为一次性耗材,保障了手术过程中导管旋转机构的卫生,提高手术安全性。
技术特征:
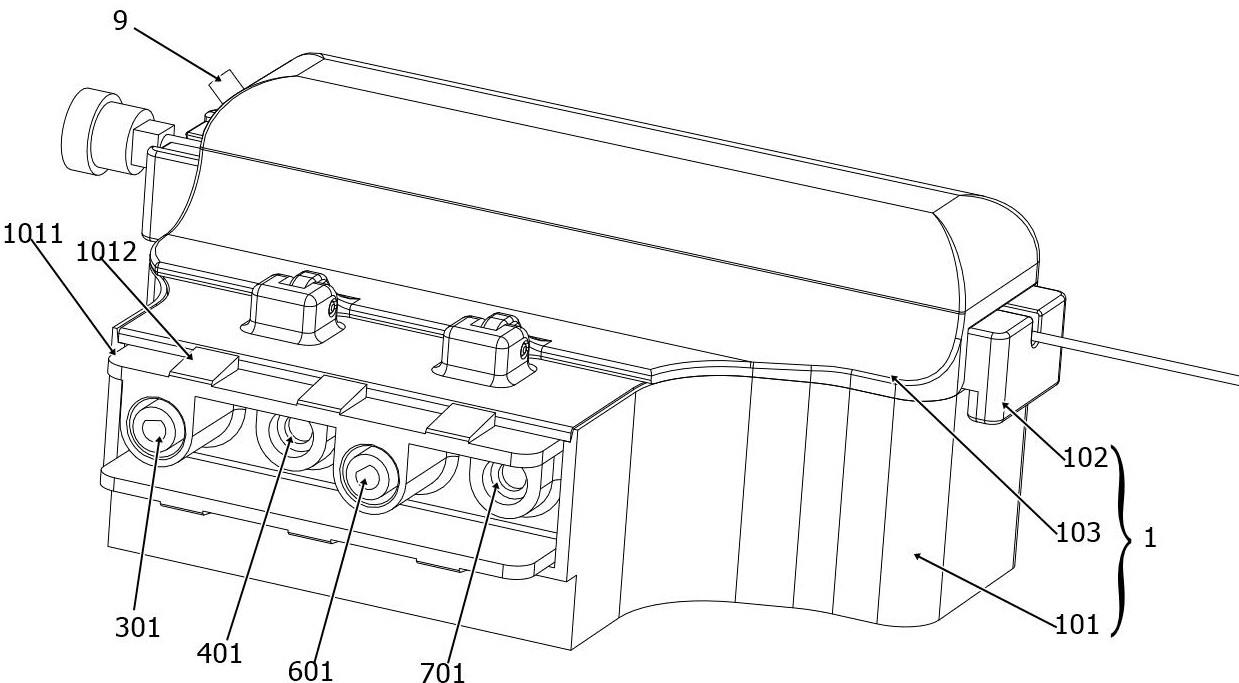
1.一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,包括水平设置的主架(101),主架(101)上安装有旋转轮(2)和调弯轮(5);主架(101)上安装有连接机构和传动机构,连接机构用于与设置在机器人主体上的电磁铁磁性连接,传动机构用于与设置在机器人主体上的驱动电机的输出轴连接,并带动旋转轮(2)和调弯轮(5)转动;
2.根据权利要求1所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述主架(101)顶面转动连接有舱盖(103),所述舱盖(103)底部设置有用于按压手柄(8)的第一压轴(1032)与第二压轴(1033)。
3.根据权利要求2所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述主架(101)一侧设置有第一磁条(1023),所述舱盖(103)一侧设置有第二磁条(1031)。
4.根据权利要求1所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述主架(101)一侧设置有安装副(1011),安装副(1011)上设置有导向块(1012)。
5.根据权利要求1所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述传动机构包括第一传动机构(3),所述第一传动机构(3)包括水平设置的第一输入轴(301),所述第一输入轴(301)转动安装在主架(101)一侧,第一输入轴(301)一端用于与驱动电机的输出轴连接,另一端连接有第一锥齿轮(302);第一锥齿轮(302)与安装在竖向设置的第一传动轴(304)顶端的第二锥齿轮(303)进行传动;第一传动轴(304)安装在主架(101)上,底部套接有第一齿轮(305);第一齿轮(305)与安装在竖向设置的第二传动轴(306)底部的第二齿轮(307)传动,第二传动轴(306)安装在主架(101)上,顶部安装有第三齿轮(308),第三齿轮(308)用于与第四齿轮(310)传动;第四齿轮(310)安装在竖向设置的第三传动轴(309)的顶部,第三传动轴(309)安装在主架(101)上,第三传动轴(309)的底部安装有第三锥齿轮(311),第三锥齿轮(311)用于与第四锥齿轮(312)传动,第四锥齿轮(312)安装在水平设置的第四传动轴(314)上,第四传动轴(314)安装在主架(101)上,第四传动轴(314)上安装有第一驱动轮(313),第一驱动轮(313)用于与旋转轮(2)摩擦传动。
6.根据权利要求5所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述连接机构包括第一连接机构(4),所述第一连接机构(4)包括水平设置的第一连接轴(401);第一连接轴(401)通过第一直线轴承(402)安装在主架(101)上;所述第一连接轴(401)一端用于与电磁铁磁性连接,另一端铰接第一差速臂(403),第一差速臂(403)远离第一连接轴(401)的一端铰接有第一法兰(404),第一法兰(404)设置在第一驱动轮(313)两侧,与第四传动轴(314)转动连接,并与主架(101)底部通过弹簧连接。
7.根据权利要求1所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述传动机构还包括第二传动机构(6),所述第二传动机构(6)包括水平设置的第二输入轴(601),所述第二输入轴(601)安装在主架(101)一侧;第二输入轴(601)一端用于与驱动电机的输出轴连接,另一端连接有第五锥齿轮(602),第五锥齿轮(602)用于与第六锥齿轮(603)传动;第六锥齿轮(603)安装在竖向设置的第五传动轴(604)的顶部,第五传动轴(604)安装在主架(101)上,第五输入轴的底部安装有第五齿轮(605),第五齿轮(605)用于与第六齿轮(607)传动;第六齿轮(607)安装在竖向设置的第六传动轴(606)底部,第六传动轴(606)安装在支架上,第六处闹闹的广州的顶部安装有第一带轮(608),第一带轮(608)与第二带轮(610)之间通过皮带传动;第二带轮(610)安装在竖向设置的第七传动轴(609)的顶部,第七传动轴(609)安装在支架上,底部安装有第七锥齿轮(611),第七锥齿轮(611)与第八锥齿轮(613)传动;第八锥齿轮(613)安装在横向设置的第八传动轴(612)的一端,第八传动轴(612)安装在主架(101)上,主架(101)上安装有第二驱动轮(614),第二驱动轮(614)用于与导弯轮摩擦传动。
8.根据权利要求7所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述连接机构包括第二连接机构(7),所述第二连接机构(7)包括水平设置的第二连接轴(701);第二连接轴(701)通过第二直线轴承(702)安装在主架(101)上;所述第二连接轴(701)一端用于与电磁铁磁性连接,另一端铰接第二差速臂(703),第二差速臂(703)远离第二连接轴(701)的一端铰接有第二法兰(704),第二法兰(704)设置在第二驱动轮(614)两侧,与第八传动轴(612)转动连接,并与主架(101)底部通过弹簧连接。
9.根据权利要求1所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述导管托架(102)上设置有安装槽(1021),安装槽(1021)底部与主架(101)中部贯通,用于旋转轮(2)和调弯轮(5)部分露出并与所述手柄(8)抵接。
10.根据权利要求1所述的一次性使用血管介入机器人专用导管旋转及调弯模块,其特征在于,所述手柄(8)上设置有摩擦部(801),所述摩擦部(801)用于与所述调弯轮(5)配合使导管弯曲;所述手柄(8)远离摩擦部(801)的一端设置有用于插入导管一端的y形阀(9)。
技术总结
本技术涉及医疗设备技术领域,具体涉及一次性使用血管介入机器人专用导管旋转及调弯模块。其包括主架,主架上安装有旋转轮和调弯轮;主架上安装有连接机构和传动机构,连接机构用于与设置在机器人主体上的电磁体磁性连接,传动机构用于与设置在机器人主体上的驱动电机的输出轴连接,并带动旋转轮和调弯轮转动;主架上设置有用于连接传动机构的轴承;主架上可拆卸连接有导管托架,导管托架用于安装手柄,手柄上安装有导管和导丝;调弯轮与手柄传动,并用于控制导管弯曲,旋转轮用于导管弯曲后位置的调整。电磁铁与连接机构为磁性连接,通过控制电磁铁是否通电可以快速安装整个装置,使装置成为一次性耗材,保障了手术过程的卫生。
技术研发人员:孙金才,狄亮
受保护的技术使用者:北京圣安杰医疗科技有限公司
技术研发日:20230406
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!