多模式步态训练下肢康复装置
本发明涉及医疗康复器械,尤其是涉及多模式步态训练下肢康复装置。
背景技术:
1、脑卒中和脑外伤的病人常常引起肢体功能障碍,此类病人也可由于长期卧床引起肢体肌肉萎缩、足下垂、足内翻、足外翻或肌肉痉挛等,给疾病的恢复和日后的康复训练增加了困难。患者的康复通常要进过多种步态模式,如平地走、上下坡、上下楼梯等训练。所以患者在康复时,应当尽量模拟设置患者以后走向家庭和社会可能遇到的多步态模式如平地走、上下坡、上下楼梯等情况。脑卒中患者步行能力的恢复与患侧下肢运动功能的康复密切相关,下肢运动康复训练使用能保持和恢复患者的关节运动幅度,有利于恢复肢体的主要运动功能。目前已经有商业化的步态康复训练装置。如英国miketopping公司1987年研制的handy1。其次另一种成功进入市场的康复机器人是荷兰exact dynamics公司开发的manus康复机器人,美国的nustep康复器、德国的thera.vital智能康复训练机器人,瑞士的wortec公司研发的motinmaker。但是,现有的步态康复训练产品因具有以下缺点:(1)不能满足对患有足下垂、足内翻和足外翻患者的调节,保证下肢康复训练的肢体功能位的摆放和矫正的需要;(2)不能满足穿戴下肢外骨骼机器人患者康复训练时保存良好的平衡性;(3)不能满足对需要多步态模式如平地走、上下坡、上下楼梯等情况患者更安全、更便携康复训练(目前已有的下肢外骨骼机器人在真实的斜坡、楼梯等场景进行多步态模式的康复训练,存在一定的危险性和复杂性)。因此,我们有必要研发一种在平地上可进行多种不同的步态模式且更安全、更稳定的下肢外骨骼康复训练设备。
技术实现思路
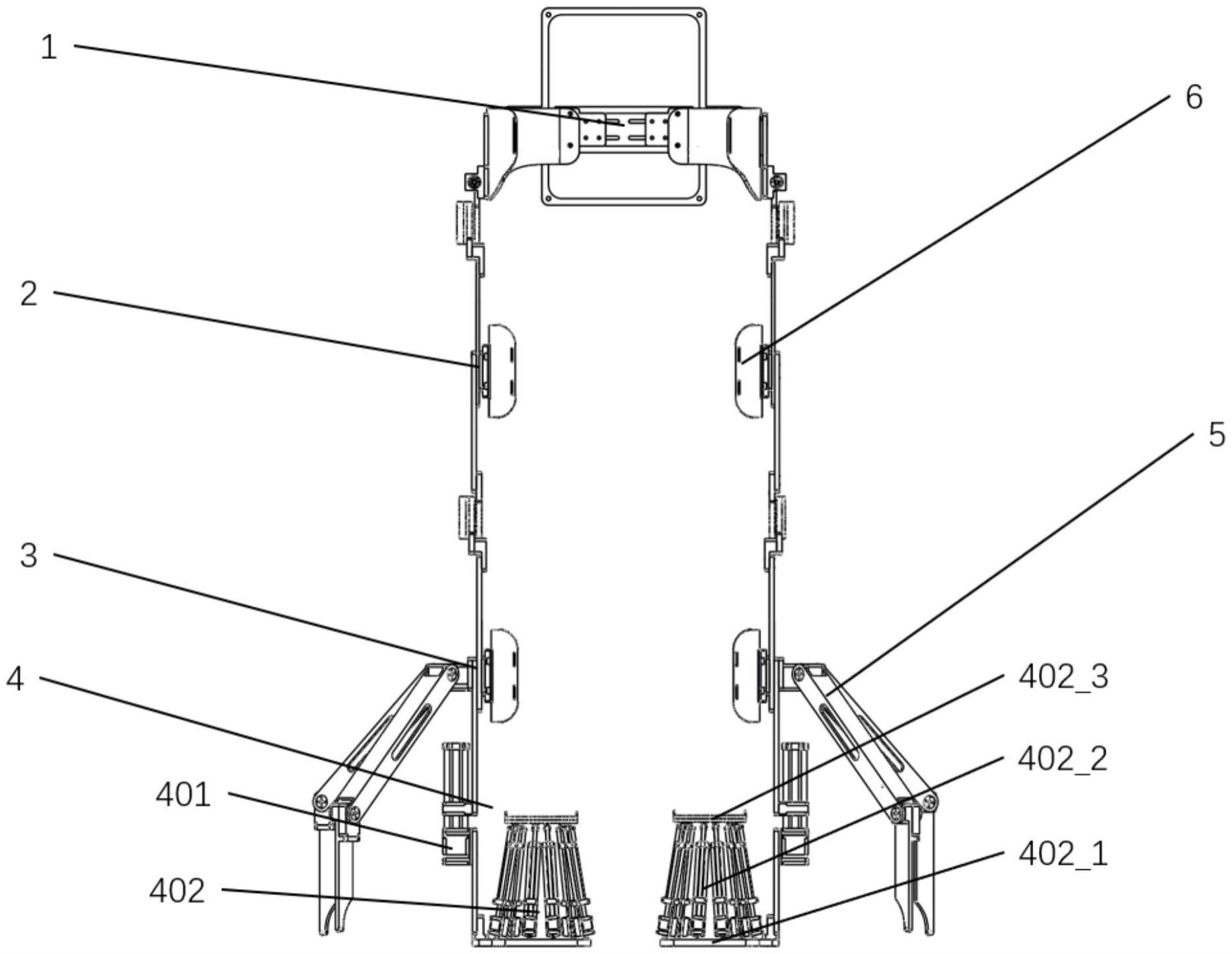
1、为了解决上述问题,本发明的目的是提供多模式步态训练下肢康复装置,包括腰部组件、大腿组件、小腿组件、脚部组件、稳定调节组件、绑缚组件;其中腰部组件、大腿组件、小腿组件、脚部组件依次相连,所述稳定调节组件和小腿组件相连,所述绑缚组件分别与腰部组件、大腿组件、小腿组件相连;所述脚部组件包括膝关节调节机构和脚部空间位置调节机构,所述脚部空间调节机构包括底架、脚板、驱动单元,所述底架和脚板之间通过六个相同驱动单元并联相连,其中,所述六个驱动单元的控制端与外部控制器信号连接,以实现所述六个驱动单元并联相连的同步控制,所述驱动单元可驱动所述脚板运动,并实现所述脚板的空间六自由度的运动。
2、本发明的多模式步态训练下肢康复装置引入稳定调节组件,可以实现稳定极限面积的增加,满足训练者在步行训练时平衡性;引入脚部空间位置调节机构,采用并联结构可以实现脚板空间六自由度(上、下、左、右、前、后)的角度调节,以实现患有足下垂、足内翻和足外翻患者的矫正,确保下肢康复训练的肢体功能位的摆放和矫正;引入踝关节调节机构和脚部空间位置调节机构,可实现多种步态模式调节,满足训练者在平地上进行平地、上下坡、上下楼梯等多种模式步态的康复训练。
3、本发明的多模式步态训练下肢康复装置可以实现正常人平地行走的步行训练、也可以实现在平地上模拟上下斜坡行走和上下楼梯行走等不同的步态模式,使患者可以在不同的步态环境下进行有针对性的更安全、更稳定步态训练,获得丰富的步态康复训练内容,从而获得更加全面的步行技能,帮助患者回归家庭、回归社会。
4、本发明的目的可以通过以下技术方案来实现:
5、本发明提供多模式步态训练下肢康复装置,包括腰部组件、大腿组件、小腿组件、脚部组件、稳定调节组件和绑缚组件,
6、所述腰部组件与所述大腿组件转动连接,所述大腿组件与所述小腿组件固定连接,所述小腿组件与所述脚部组件固定连接,所述稳定调节组件与所述小腿组件固定连接,所述绑缚组件分别与所述腰部组件、所述大腿组件、所述小腿组件、所述脚部组件固定相连,
7、所述腰部组件用于调节腰部宽度;包括腰部电源控制盒、腰部调节机构和下肢连接机构,沿所述腰部电源控制盒中心两侧,各设置一与其活动连接的腰部调节机构,腰部调节机构远离腰部电源控制盒的端部与下肢连接机构相连接;
8、所述大腿组件用于连接腰部组件和小腿组件,并调节大腿长度;沿腰部组件中心轴左右对称设置,包括髋关节执行机构和大腿调节机构,所述髋关节执行机构与下肢连接机构相连接,髋关节执行机构远离下肢连接机构的端部与大腿调节机构上部活动连接;
9、所述小腿组件用于连接大腿组件和脚部组件,并调节小腿长;沿腰部组件中心轴左右对称设置,包括膝关节执行机构和小腿调节机构,所述膝关节执行机构上部与大腿调节机构下部相连接,膝关节执行机构下部与小腿调节机构上部相连接;
10、所述脚部组件用于调节脚空间位置;沿腰部组件中心轴左右对称设置,包括踝关节调节机构和脚部空间位置调节机构,所述踝关节调节机构上部与小腿调节机构下部相连接,踝关节调节机构内侧与脚部空间位置调节机构相连接;
11、所述稳定调节组件用于调节平衡度;沿腰部组件中心轴左右对称设置,包括前部稳定调节机构、后部稳定调节机构和稳定固定机构,所述稳定固定机构与小腿调节机构下部相连接,还设置有前固定部和后固定部,并通过前固定部与前部稳定调节机构相连接,通过后固定部与后部稳定调节机构相连接;
12、所述绑缚组件用于固定和矫正腰部、大腿部和小腿部;沿腰部组件中心轴左右对称设置,包括腰部绑缚机构、大腿绑缚机构和小腿绑缚机构,所述腰部绑缚组件设置有两个,并分别设置于第一腰部连接件、第二腰部连接件远离腰部电源控制盒的端部;所述大腿绑缚机构设置有两个,并设置于大腿调节机构中部内侧;所述小腿绑缚机构设置有两个,并设置于小腿调节机构中部内侧。
13、在本发明的一个实施方式中,所述腰部电源控制盒用于安装下肢康复装置的电源和控制件,包括腰部电源控制盒主体和腰部电源控制盒盖,所述腰部电源控制盒盖设置于腰部电源控制盒主体外侧;
14、所述腰部调节机构用于调节下肢康复装置的腰部宽度,包括第一腰部连接件、第二腰部连接件和调节连接件,第一腰部连接件和第二腰部连接件沿调节连接件对称设置,且,第一腰部连接件与第二腰部连接件均与调节连接件活动连接,调节连接件允许第一腰部连接件和第二腰部连接件同时相向或相背运动;
15、调节连接件与腰部电源控制盒盖相连接,腰部电源控制盒盖上设置有与调节连接件相匹配的凹槽;
16、所述下肢连接机构设置有两组,沿腰部电源控制盒左右对称设置,分别与第一腰部连接件和第二腰部连接件相连接,包括轴、第一轴支撑座和第二轴支撑座,所述轴固定于第一轴支撑座和第二轴支撑座上,且第一轴支撑座与第二轴支撑座固定于第一腰部连接件及第二腰部连接件下方。
17、在本发明的一个实施方式中,所述调节连接件上设置有第一滑动部和第二滑动部,所述第一滑动部和第二滑动部沿调节连接件中心对称;
18、所述第一腰部连接件包括第一固定部、第一弧形连接部和第三固定部,所述第一固定部通过第一滑动部与调节连接件活动连接,第一固定部通过第一弧形连接部与第三固定部相连接,第三固定部下方与第一轴支撑座与第二轴支撑座相连接;
19、所述第二腰部连接件包括第二固定部、第二弧形连接部和第四固定部,所述第二固定部通过第二滑动部与调节连接件活动连接,第二固定部通过第二弧形连接部与第四固定部相连接,第四固定部下方与第一轴支撑座与第二轴支撑座相连接;
20、所述第一滑动部和第二滑动部使所述第一腰部连接件和第二腰部连接件同时相向或相背运动,从而调节所述腰部调节机构的宽度。
21、在本发明的一个实施方式中,所述髋关节执行机构包括髋关节电机连接板、髋关节电机连接法兰、第一盘式无刷电机、第一谐波减速器和髋关节支撑板,
22、所述髋关节电机连接板上端部与轴相连接,下端部设置有第一孔洞,第一孔洞的内侧设置有第一凹槽,第一凹槽大于第一孔洞的直径,且与第一孔洞中轴线相同;髋关节电机连接板外侧依次有髋关节支撑板、第一谐波减速器和第一盘式无刷电机,第一凹槽与髋关节电机连接法兰的外圈相连接;
23、其中,所述髋关节支撑板与第一谐波减速器的外圈固定连接,所述第一谐波减速器与第一盘式无刷电机固定连接,所述髋关节电机连接法兰的内圈穿过第一孔洞与第一谐波减速器的内圈固定连接,允许所述髋关节电机连接板和所述髋关节支撑板相对转动,用于调节所述大腿组件与所述腰部组件相对转动;
24、所述大腿调节机构用于调节下肢康复装置的大腿长度,包括大腿固定件、第一大腿连接件、第二大腿连接件和第三大腿连接件,大腿固定件一个端部与髋关节支撑板底部相连接,另一个端部与第一大腿连接件顶部相连接,第一大腿连接件上沿其高度方向设置有第三滑动部,第二大腿连接件和第三大腿连接件的上端部分别设置于第一大腿连接件两侧,并穿过第三滑动部固定连接,从而与第一大腿连接件活动连接;允许所述第一大腿连接件和所述第三大腿连接件同时相向或相背运动,从而调节所述大腿组件的长度。
25、在本发明的一个实施方式中,所述第一盘式无刷电机和所述第一谐波减速器为本领域技术人员所熟知的结构,故在此不再为所述第一盘式无刷电机和所述第一谐波减速器的内部结构进行详细说明。
26、在本发明的一个实施方式中,所述膝关节执行机构包括膝关节电机连接板、膝关节电机连接法兰、第二盘式无刷电机、第二谐波减速器和膝关节支撑板,
27、所述膝关节电机连接板上端部与第三大腿连接件的下端部固定连接,下端部设置有第二孔洞,第二孔洞的两侧设置有第二凹槽,第二凹槽大于第二孔洞的直径,且与第二孔洞中轴线相同;膝关节电机连接板外侧依次有膝关节支撑板、第二谐波减速器和第二盘式无刷电机,第二凹槽与膝关节电机连接法兰的外圈相连接;
28、其中,所述膝关节支撑板与第二谐波减速器的外圈固定连接,所述第二谐波减速器与第二盘式无刷电机固定连接,所述膝关节电机连接法兰的内圈穿过第二孔洞与第二谐波减速器的内圈固定连接,允许膝关节电机连接板和膝关节支撑板相对转动,用于调节所述大腿组件与小腿组件相对转动;
29、所述小腿调节机构用于调节下肢康复装置的小腿长度,包括小腿固定件、第一小腿连接件、第二小腿连接件和第三小腿连接件,小腿固定件一个端部与膝关节支撑板底部相连接,另一个端部与第一小腿连接件顶部相连接,第一小腿连接件上沿其高度方向设置有第四滑动部,第二小腿连接件和第三小腿连接件的上端部分别设置于第一小腿连接件两侧,并穿过第四滑动部固定连接,从而与第一小腿连接件活动连接;允许所述第一小腿连接件和所述第三小腿连接件同时相向或相背运动,从而调节所述小腿组件的长度。
30、在本发明的一个实施方式中,所述第二盘式无刷电机和所述第二谐波减速器为本领域技术人员所熟知的结构,故在此不再为所述第二盘式无刷电机和所述第二谐波减速器的内部结构进行详细说明。
31、在本发明的一个实施方式中,所述踝关节调节机构用于调节下肢康复装置的脚高度,包括踝关节丝杆组件和踝关节连接件,踝关节丝杆组件分别与第三小腿连接件底端及踝关节连接件顶端相连接;
32、所述脚部空间位置调节机构用于调节下肢康复装置的脚的高度和倾斜度,包括脚板组件、驱动单元和底架组件,底架组件端部的侧面与踝关节底部相连接,上表面通过若干相同的并联的驱动单元与脚板组件相连接,使所述脚板组件和所述底架组件相对空间位置移动,从而调节脚板组件的高度、倾斜度。
33、在本发明的一个实施方式中,所述若干驱动单元的控制端与外部控制器信号连接,以实现所述六个驱动单元并联相连的同步控制,所述驱动单元可驱动所述脚板组件运动,并实现所述脚板组件的空间六自由度的运动。
34、在本发明的一个实施方式中,外部控制器为位置控制器,位置控制器为pid控制器,控制器为本领域技术人员所熟知的结构,故在此不再为控制器的内部结构进行详细说明。
35、在本发明的一个实施方式中,所述踝关节丝杆组件包括踝关节电机支座、踝关节电机、踝关节丝杆支座、踝关节左杆、踝关节丝杆、踝关节右杆和踝关节丝杆固定座,
36、所述踝关节电机设置于踝关节电机支座内部,顶端与踝关节丝杆底端相连接,踝关节电机支座内侧与踝关节连接件上端部相连接,顶端与平行于踝关节丝杆并设置于踝关节丝杆两侧的踝关节左杆和踝关节右杆相连接,踝关节丝杆、踝关节左杆和踝关节右杆穿过踝关节丝杆支座并与其活动连接(踝关节丝杆与踝关节丝杆支座螺纹活动连接,踝关节左杆和踝关节右杆与踝关节丝杆支座滑动连接),顶端与踝关节丝杆固定座固定连接;所述踝关节丝杆支座和所述踝关节连接件相对滑动,从而调节所述踝关节连接件的高度;
37、所述底架组件包括底架和脚部固定件,所述底架的侧边端部与脚部固定件固定连接,并通过脚部固定件与踝关节连接件下端部固定连接;使所述脚部组件和所述小腿组件相对空间位置移动,从而可以实现在平地上模拟上下斜坡行走和上下楼梯行走的脚部空间位置变化;
38、其中,底架用于固定连接所述驱动单元并提供支撑,驱动单元用于为所述脚板组件提供支撑和驱动力;
39、所述脚板组件包括脚板、脚板绑缚板和脚踏板,所述脚板上表面通过脚板绑缚板与脚踏板相连接;
40、所述驱动单元并联设置有若干组,所述驱动单元包括第一驱动连接件、第二驱动连接件和线性驱动件,所述线性驱动件的一个端部通过第一驱动连接件与底架上表面相连接,另一个端部通过第二驱动连接件与脚板下表面相连接;
41、线性驱动件运动过程中,通过第一驱动连接件和第二驱动连接件带动脚板组件调到指定空间位置。
42、在本发明的一个实施方式中,若干第一驱动连接件距离底架中心的距离均相同,且第一驱动连接件两两靠近;若干第二驱动连接件距离脚板中心的距离均相同,且第二驱动连接件两两靠近;第一驱动连接件距离底架中心的距离大于第二驱动连接件距离脚板中心的距离。
43、在本发明的一个实施方式中,所述第一驱动连接件和所述第二驱动连接件均为转动副,且均具有两个转动端,可以为万向节或球铰,考虑到万向节相比于球铰可以提供更高的刚度和精度,保证安装于外部结构时工作高效可靠,运行稳定,所述第一驱动连接件与第二驱动连接件分别为万向节与球铰,所述线性驱动件通过万向节与球铰可实现变角度传递动力,其中所述第一驱动连接件和所述第二驱动连接件为本领域技术人员所熟知的结构,故在此不再为所述第一驱动连接件和所述第二驱动连接件的内部结构进行详细说明。
44、在本发明的一个实施方式中,所述线性驱动件包括驱动电机支座、驱动电机、驱动丝杆支座、驱动左杆、驱动右杆、驱动丝杆、驱动前杆、驱动后杆、驱动丝杆固定座和驱动运动杆固定座,
45、所述驱动电机设置于驱动电机支座内部,顶端与驱动丝杆底端相连接,驱动电机支座底端与第一驱动连接件相连接,顶端与平行于驱动丝杆并设置于驱动丝杆左右两侧的驱动左杆和驱动右杆相连接,驱动丝杆、驱动左杆和驱动右杆穿过驱动丝杆支座并与其活动连接(驱动丝杆与驱动丝杆支座螺纹活动连接,驱动左杆和驱动右杆与驱动丝杆支座滑动活动连接),顶端与驱动丝杆固定座固定连接,驱动丝杆支座与平行于驱动丝杆并设置于驱动丝杆前后两侧的驱动前杆和驱动后杆固定连接,驱动前杆和驱动后杆穿过驱动丝杆固定座并与其滑动活动连接,顶端与驱动运动杆固定座固定连接,驱动运动杆固定座顶端与第二驱动连接件相连接;所述驱动运动杆固定座和所述驱动电机支座相对滑动,从而调节所述线性驱动件的长度。
46、在本发明的一个实施方式中,所述踝关节电机为本领域技术人员所熟知的结构,故在此不再为所述踝关节电机的内部结构进行详细说明。
47、在本发明的一个实施方式中,所述驱动电机为本领域技术人员所熟知的结构,故在此不再为所述驱动电机的内部结构进行详细说明。
48、在本发明的一个实施方式中,所述稳定固定机构包括稳定固定主体和稳定固定盖,所述稳定固定盖设置于稳定固定主体外侧,所述稳定固定主体与第三小腿连接件上端部外侧相连接,使所述前部稳定调节机构和所述后部稳定调节机构与所述小腿组件相对动作关系变化,从而可以实现对穿戴下肢外骨骼机器人患者康复训练时保存良好的稳定平衡性的需要。
49、稳定固定主体还设置有前固定部和后固定部,所述前部稳定调节机构与所述后部稳定调节机构分别与所述前固定部与后固定部固定相连,使所述前部稳定调节机构和所述后部稳定调节机构与所述稳定固定机构相对动作关系变化,从而可以实现所述前部稳定调节机构和所述后部稳定调节机构空间位置变化;
50、所述前部稳定调节机构与后部稳定调节机构结构相同、安装方式相同,且前后对称;
51、所述前部稳定调节机构包括第一稳定调节电机、第一连杆、第二连杆、第二稳定调节电机和电机连接法兰,第一稳定调节电机与前固定部相连接,下端部依次设与内部中空的第一连杆上端部相连接,第一连杆下端部的一个侧面设置有第三孔洞,另一个相对的侧面设置有第四孔洞,第三孔洞和第四孔洞之间包覆有固定连接的第二连杆和第二稳定调节电机(第二稳定调节电机的t型输出轴与第二连杆一端固定连接),第三孔洞远离第四孔洞的一侧设置有第一电机连接法兰,第四孔洞远离第三孔洞的一侧设置有第二法兰,第一电机连接法兰的外圈与第三孔洞的内圈相嵌合,并与第二连杆的内圈固定连接,第二电机连接法兰的外圈与第四孔洞的内圈相嵌合,并与第二稳定调节电机固定连接。
52、在本发明的一个实施方式中,所述第一稳定调节电机和所述第二稳定调节电机均为t型电机并为本领域技术人员所熟知的结构,故在此不再为第一稳定调节电机和所述第二稳定调节电机的内部结构进行详细说明。
53、在本发明的一个实施方式中,所述腰部绑缚组件为腰部绑缚件,所述腰部绑缚件呈弧形,且凸起侧设置于外侧,端部分别与第三固定部或第四固定部相连接;
54、所述大腿绑缚机构包括大腿绑缚固定块和大腿绑缚件,所述大腿绑缚件呈弧形,大腿绑缚固定块设置于大腿绑缚件凸起侧,所述大腿绑缚件固定块与第二大腿连接件内侧相连接;
55、所述小腿绑缚机构包括小腿绑缚固定块和小腿绑缚件,所述小腿绑缚件呈弧形,小腿绑缚固定块设置于小腿绑缚件凸起侧,所述小腿绑缚件固定块与第二小腿连接件内侧相连接。
56、本发明的多模式步态训练下肢康复装置通过控制和/或协调脚部组件的脚部空间位置调节机构,利用六个驱动单元的控制端与控制器信号连接,以实现所述六个驱动单元并联相连的同步控制,驱动单元可驱动脚板运动,并实现脚板的空间六自由度的运动,可以实现患有足下垂、足内翻和足外翻患者的调节,保证下肢康复训练的肢体功能位的摆放和矫正的需要。
57、本发明的多模式步态训练下肢康复装置通过控制和/或协调前部稳定调节机构和后部稳定调节机构(二连杆结构),实现稳定极限面积的增加,从而实现对穿戴下肢外骨骼机器人患者康复训练时保存良好的稳定平衡性的需要。
58、本发明的多模式步态训练下肢康复装置通过控制和/或协调大腿组件、小腿组件、脚部组件的踝关节调节结构和脚部空间位置调节机构之间的动作关系,可以实现正常人平地行走的步行轨迹、也可以实现在平地上模拟上下斜坡行走和上下楼梯行走的步行轨迹。
59、与现有技术相比,本发明具有以下有益效果:
60、(1)本发明的多模式步态训练下肢康复装置引入脚部组件的脚部空间位置调节机构,可以实现脚板组件空间六自由度(上、下、左、右、前、后)的角度调节,平衡下肢康复训练中足部的受力情况,以实现患有足内翻、足外翻和足下垂患者的调节,保证下肢康复训练的肢体功能位的摆放和矫正的需要。
61、(2)本发明的多模式步态训练下肢康复装置引入稳定调节组件,可以通过前部稳定调节机构和后部稳定调节机构的调节,实现稳定极限面积的增加,从而实现对穿戴下肢外骨骼机器人患者康复训练时保存良好的稳定平衡性的需要,保证了患者的训练安全,从而解放了患者双手。
62、(3)本发明的多模式步态训练下肢康复装置引入脚部组件的踝关节调节结构和脚部空间位置调节机构,通过协调大腿组件、小腿组件、脚部组件的踝关节调节结构和脚部空间位置调节机构之间的动作关系,可以实现正常人平地行走的步行轨迹、也可以实现在平地上模拟上下斜坡行走和上下楼梯行走等不同的步态模式,使患者可以在不同的步态环境下进行有针对性的更安全、更稳定步态训练,获得丰富的步态康复训练内容,从而获得更加全面的步行技能,帮助患者回归家庭、回归社会。
- 还没有人留言评论。精彩留言会获得点赞!