定位机构和手术机器人的制作方法
本技术涉及医疗器械领域,具体涉及一种定位机构和手术机器人。
背景技术:
1、手术机器人系统通常包括操作端和从动端,操作者通过操作端与机器人系统进行交互,并向从动端传递操作者的控制信息,从而操控从动端。从动端一般包括相连的机架、定位机构、机械臂和末端器械。手术机器人系统应用于微创手术情况下,通常由定位机构进行预定位,使末端器械靠近患者的创口,并通过操作端操控机械臂,使末端器械通过患者身上的创口伸入患者体内并达到病灶。在手术过程中,末端器械需以创口处为不动点进行摆动,以此避免末端器械对创口的拉扯。
2、然而,现有定位机构运动范围较小,难以满足末端器械初始姿态的要求。
技术实现思路
1、因此,本实用新型的目的在于提供一种定位机构及应用该定位机构的手术机器人,以至少解决定位机构运动范围较小的问题。
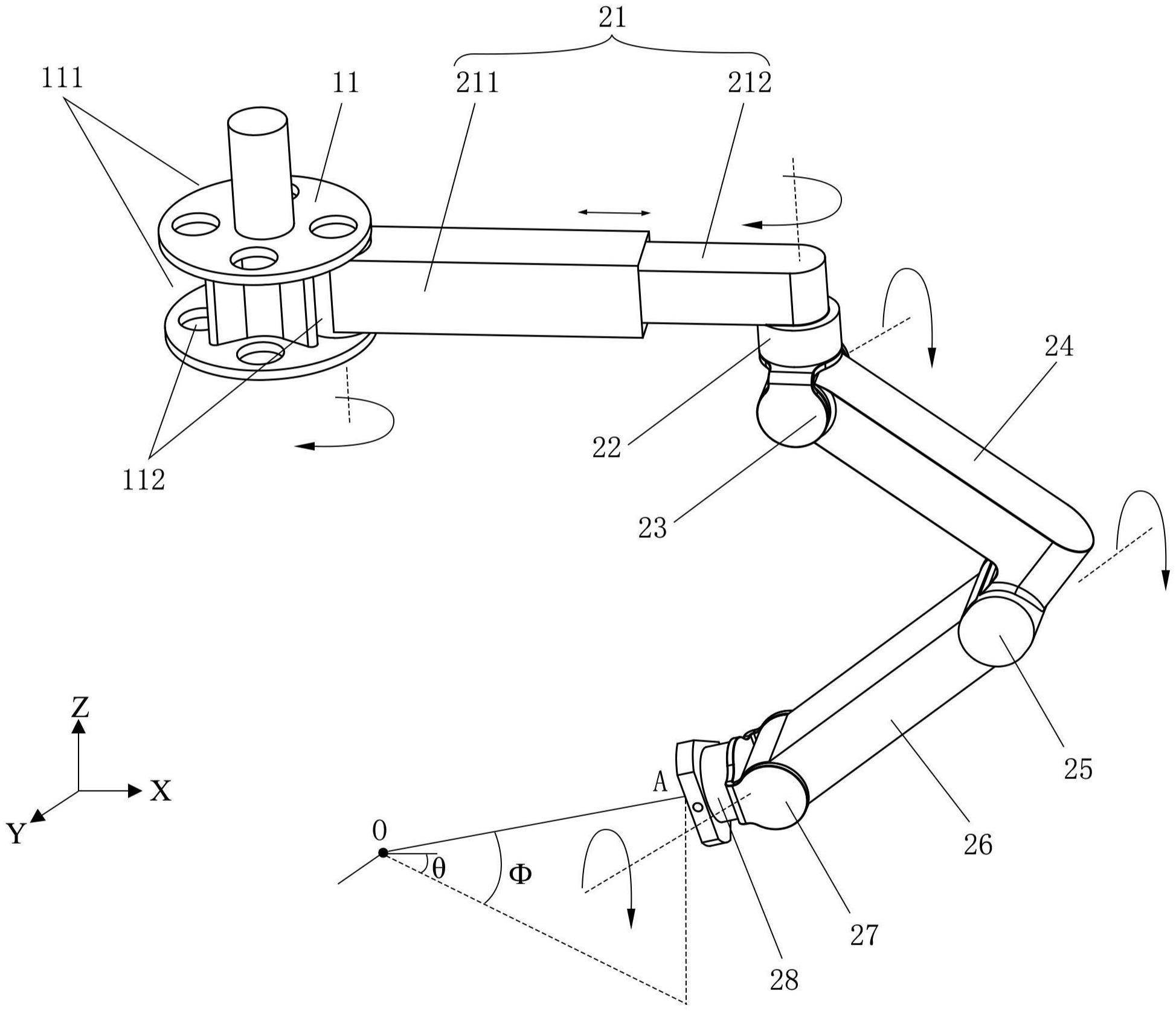
2、本实用新型的第一方面实施例提供了一种定位机构,定位机构包括:安装臂和与安装臂转动连接的俯仰臂;俯仰臂包括第一臂、第二臂和第三臂,第一臂与安装臂的第一端转动连接,第一臂、第二臂和第三臂依次转动连接。
3、本方面实施例提供的定位机构,可以使第三臂独立进行俯仰运动,也可以使第二臂带动第三臂进行俯仰运动,还可以使第一臂能够带动第二臂和第三臂围绕安装臂的第一端进行俯仰运动,提高定位机构针对俯仰角的调整幅度,使俯仰臂末端具有较大的俯仰角度,提高了定位机构的运动范围和灵活性。
4、在一些实施例中,第一臂、第二臂和第三臂位于同一平面内,并能够在同一平面内做俯仰运动。
5、在这些实施例中,第一臂、第二臂和第三臂在同一平面内做俯仰运动,可以在较大的俯仰调节范围的同时,减小俯仰臂的空间占用率。在多个定位机构安装的情况下,可以降低相邻的定位机构发生碰撞的几率,有利于使多个定位机构在周向上近距离安装且不易干涉。此外,第一臂、第二臂和第三臂在同一平面内运动,活动轨迹可预判性高,有利于准确操控定位机构,以及利用视觉观察预判控制方位,安全性能较好。
6、在一些实施例中,第二臂上设有避让部,至少部分第三臂能够旋转至避让部内,以使第三臂与第二臂至少部分堆叠。增加了第三臂的俯仰运动范围,从而进一步提高了俯仰臂末端的俯仰范围。在该定位机构应用在手术机器人的情况下,增加了并联机械臂和末端器械的回退行程而远离不动点,从而方便末端器械的更换,提高安全性。另一方面,在对定位机构进行收纳时,还可以使第三臂与第二臂至少部分堆叠从而减小占用空间。
7、在一些实施例中,第二臂包括中空的框体,框体围成中空的避让部。方便通过框体的侧边容纳第三臂相对的两侧。而且结构简单,并能降低一定的自重。
8、在一些实施例中,第二臂的避让部能够旋转至第一臂的外部,以使第一臂与第二臂至少部分堆叠。其中,第一臂和第三臂可替换地旋转至避让部内。
9、在这些实施例中,使第二臂相对于第一臂做俯仰运动的过程中能够通过避让部容纳至少部分第一臂,增加了第二臂的俯仰运动范围,从而提高了俯仰臂的运动范围。在该定位机构应用在手术机器人的情况下,增加了并联机械臂和末端器械的回退行程而远离不动点,从而方便末端器械的更换,提高安全性。另一方面,在对定位机构进行收纳时,还可以使第二臂与第一臂至少部分堆叠从而减小占用空间。同时其中只有一个臂能够旋转到避让部内,可以提高定位机构调整的灵活性。
10、在一些实施例中,第二臂包括顺次相连的第一杆和第二杆,第一杆与第二杆呈角度设置,至少部分第三臂能够进入到第一杆和第二杆所围区域中。
11、在这些实施例中,第一杆和第二杆呈角度设置,也即二者之间具有小于180°的夹角。使得第一杆和第二杆可以围成一个开放式的避让区域,使第三臂能够旋转到该避让区域中,一方面可以在收纳时将第三臂移动到该避让区域中,减小定位机构的占用空间;另一方面相较于第二臂为一条直臂,可以增加第三臂的运动范围,有利于末端器械的更换。
12、在一些实施例中,第一臂包括顺次相连的第三杆和第四杆,第三杆和第四杆呈角度设置,至少部分第二臂能够进入到第三杆和第四杆所围区域中。
13、在这些实施例中,第三杆和第四杆呈角度设置,也即二者之间具有小于180°的夹角。使得第三杆和第四杆可以围成一个开放式的避让区域,使至少部分第二臂能够旋转到该避让区域中,一方面可以在收纳时将第二臂移动到该避让区域中,减小定位机构的占用空间;另一方面相较于第一臂为一条直臂,可以增加第二臂的运动范围,有利于末端器械的更换。
14、在一些实施例中,第三臂包括相连的第五杆和第六杆,第五杆和第六杆呈角度设置,第五杆与第二臂转动连接。
15、在这些实施例中,第五杆和第六杆呈角度设置,也即二者之间具有小于180°的夹角,相较于第三臂为一条直臂,可以使与第三臂连接的并联机械臂的回退范围较大。
16、在一些实施例中,第一杆内设置有避让部,第五杆能够旋转至第一杆的避让部内。使至少部分第五杆能够与第一杆堆叠在一起,提高第三臂的活动范围。
17、在一些实施例中,第二杆内设置有避让部,第一杆的避让部与第二杆的避让部连通,第五杆能够旋转至第一杆的避让部中和第二杆的避让部中。提高第三臂的活动范围。
18、在一些实施例中,第二杆内设置有避让部,第六杆能够旋转至第一杆的避让部中。进一步加大第三臂的活动范围。
19、在一些实施例中,角度为90度。使第一杆和第二杆呈l形分布,使第三杆和第四杆呈l形分布,使第五杆和第六杆呈l形分布,l形杆具有较好的回退行程,可以使其中一个位于另一个所围区域中,减小收纳空间。
20、在一些实施例中,第一杆的长度大于第二杆的长度。通过较长的杆来与第一臂连接,使俯仰臂具有较大的运动半径。
21、在一些实施例中,第三杆的长度大于第四杆的长度。通过较长的杆来与安装臂连接,使俯仰臂具有较大的运动半径。
22、在一些实施例中,第一杆的长度小于第三杆的长度。则在第二臂进入到第三杆和第四杆所围区域的情况下,可以使第一杆在第三杆的延伸方向上不外凸于第三杆,方便收纳的同时,减小收纳空间。
23、在一些实施例中,第二杆的长度大于第四杆的长度。有利于扩大俯仰臂的运动半径。而且,可以使第一杆和第二杆所围区域较大,从而便于收纳第三臂和并联机械臂。
24、在一些实施例中,第一臂的长度等于第二臂的长度。
25、在一些实施例中,第三臂的长度小于第二臂的长度。便于第三臂收纳在第二臂所围区域中。而且第三臂较短,更为灵活。
26、在一些实施例中,在收纳状态下,第一臂和第二臂位于安装臂的下方,并且第一臂和第二臂在水平方向上的长度小于安装臂;和/或在收纳状态下,第一臂和第二臂能够在水平方向或竖直方向叠置分布或者第一臂包裹第二臂的一部分。减小收纳所需空间,占用面积小。
27、在一些实施例中,第三臂远离第二臂的一端相对于水平面的俯仰范围为-20°至110°。第三臂的俯仰范围较大,在该定位机构应用在手术机器人的情况下,由于第三臂具有较大的俯仰角调整范围,在术前,可利用定位机构调节末端器械的俯仰角,从而使并联机械臂能够保持初始姿态,即并联机械臂处于零位状态,因此,并联机械臂能够以最大的调节行程调节末端器械,使末端器械具有较大的调节范围。避免并联机械臂在俯仰角上占用较大的行程,从而使末端器械的运动受限。
28、在一些实施例中,第六杆和第五杆中一个设置有滑槽,另一个设置有与滑槽相适配的滑块。滑槽的延伸方向与第三臂做俯仰运动所围轴线的延伸方向相垂直。则在第三臂相对于第二臂伸展到极限角度后,还可以驱动第六杆沿滑槽的延伸方向进一步靠近不动点。而在第三臂相对于第二臂回退到极限角度后,还可以驱动第六杆沿滑槽的延伸方向进一步远离不动点,提高了定位机构的运动范围和灵活性。
29、在一些实施例中,定位机构还包括:多个臂驱动器,第一臂、第二臂和第三臂中任一个均与一个臂驱动器驱动连接。有利于独立驱动臂运动,提高定位机构的操控灵活性。
30、在一些实施例中,第一臂、第二臂和第三臂中任一臂做旋转运动所围绕的轴线相平行。
31、在这些实施例中,使多个臂围绕平行的轴线做俯仰运动,有利于折叠俯仰臂,减小占用空间,而且方便控制。此外,多个臂依次相连,大致在同一竖直区域内做俯仰运动,所需运动空间较小,不易与水平方向相邻的俯仰臂发生磕碰。
32、在一些实施例中,安装臂的第一端设置有第一转动机构,第一转动机构与俯仰臂相连,第一转动机构能够带动俯仰臂围绕安装臂的第一端在水平方向上旋转。
33、在这些实施例中,使俯仰臂即可以进行俯仰运动,又可以水平旋转,提高了俯仰臂的运动范围,有利于在手术前,利用定位机构调节好末端器械的方位角和俯仰角,使定位机构能够独立完成末端器械的初始姿态定位,而不依赖并联机械臂,不影响并联机械臂的运动范围。而且,有利于将俯仰臂旋转至安装臂的下方,减小侵占空间,而且还能够将俯仰臂向安装臂的外侧旋转,扩大运动半径。
34、在一些实施例中,俯仰臂在水平方向上旋转所围绕的轴线与第一臂做俯仰运动所围绕的轴线相垂直。使俯仰臂能够在三维空间内准确调节姿态,提高俯仰臂的活动范围。
35、在一些实施例中,安装臂为可在水平方向旋转的伸缩臂。
36、在这些实施例中,使定位机构除了能够利用俯仰臂做俯仰运动外,还可以利用安装臂在水平方向上伸缩平移,以及利用安装臂在水平方向上旋转,在三维空间内具有多个方向的自由度。此外,与安装臂连接在第三臂的底部相比,可以减小定位机构的底部在水平方向上的占用空间,避免安装臂在水平方向上旋转或伸缩时与医务人员发生磕碰。
37、在一些实施例中,安装臂和俯仰臂位于同一平面。减小定位机构的占用空间,便于收纳,而且不易与周围其他定位机构发生碰撞干涉。
38、本实用新型的第二方面实施例提供了一种手术机器人,包括至少一个如上述技术方案中任一项的定位机构。本方面实施例提供的手术机器人,由于具有上述任一实施例的定位机构,进而具有上述任一实施例的有益效果,在此不一一赘述。
39、在一些实施例中,手术机器人还包括机架和用于安装末端器械的并联机械臂,安装臂与机架转动连接,第三臂与并联机械臂相连接。安装臂可以围绕机架转动,进一步提高了定位机构的活动自由度,有利于在手术前,利用定位机构独立完成末端器械的初始姿态定位,而不依赖并联机械臂,不影响并联机械臂的运动范围,提高灵活性。
40、在一些实施例中,并联机械臂与第三臂的第六杆相连。
41、在一些实施例中,并联机械臂包括动平台、静平台和用于连接动平台和静平台的多个支链,动平台用于连接末端器械,静平台与第三臂相连接。则并联机械臂可以依据多个支链的伸缩在三维空间内调节动平台的姿态,进而调节末端器械的姿态。
42、将在接下来的描述中部分阐述本实用新型总体构思另外的方面和/或优点,还有一部分通过描述将是清楚的,或者可以经过本实用新型总体构思的实施而得知。
- 还没有人留言评论。精彩留言会获得点赞!